
笔记;超声波倒车雷达方案分析(一)
需求:搜集超声波倒车雷达方案,了解基础知识和开发要点。
一、基础概念
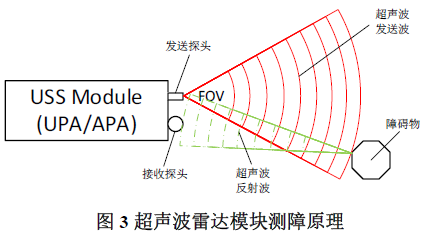
1.1 测量原理
超声波发送探头向外发送超声波,超声波在向外扩散过程中遇到障碍物会产生反射波,通过接收探头对反射波进行接收,
采集发送和接收到超声波的时间差来计算障碍物的距离。常用探头工作频率有40KHz,48KHz 以及58KHz。
频率越高,灵敏度越高,
1.2 应用场景
作为一种主动有源传感器,超声波雷达使用TOF进行测距,发出超过人耳听觉范围的超声波计算时间差获得障碍物距离信息。
通常为40~60kHz,探测距离典型值在0.2m~5m之间。
| 类别 | 检测距离 | FOV | 安装位置 | 用途 | 备注 |
| APA(Active Park Assist System) | 30-500cm | 较窄 | 车身侧面 | 车位判空与障碍物距离检测 | 探测距离较长,频率较低,为40kHz,精度一般 |
| UPA(Ultrasonic Park Assist System) | 15-250cm | 较大 | 前后保杠 | 障碍物距离检测 | 探测距离较短,频率较高,为58kHz,精度高 |
1.3 探头选型
整个倒车系统的最核心部件,其作用是发出超声波及接收超声波。影响其性能的主要参数有:外形尺寸与工作频率。
超声波传感器尺寸:
| 尺寸 | Φ12mm | Φ14mm | Φ15mm | Φ18mm |
| 水平/垂直角度比 | 1:1 | 2:1 | 2:1 | 2.75:1 |
--尺寸越大,水平/垂直角度比就越大;
--水平/垂直比率较高的探头,可以应用在探 头安装位置离地面较低,要求侦测距离较远的车型上。
--工作频率:40KHz,48KHz,60KHz,其中40KHz使用最普遍,性价比最高。60KHz设计、制造难度较大。
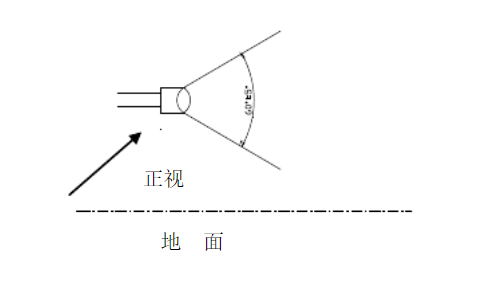
1.3.1 按侦测角度分类
水平方向发射角度
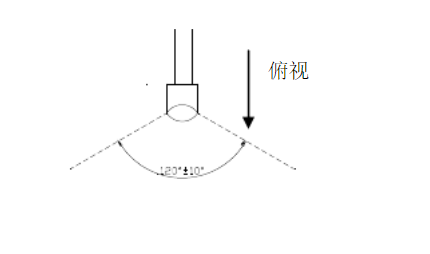
垂直方向发射角度
等方性传感器
水平角度与垂直角度相同。
缺点:垂直照射角度过大,容易探测到地,无法侦测较远的距离。
优点:产生的超声波波形稳定。
异方性传感器
水平角度与垂直角度不同。
缺点:超声波波形强弱较不易稳定,而容易产生误报警的情况。
优点:垂直角度小,因而探测距离长,探测范围大。
1.3.2 按接口分类
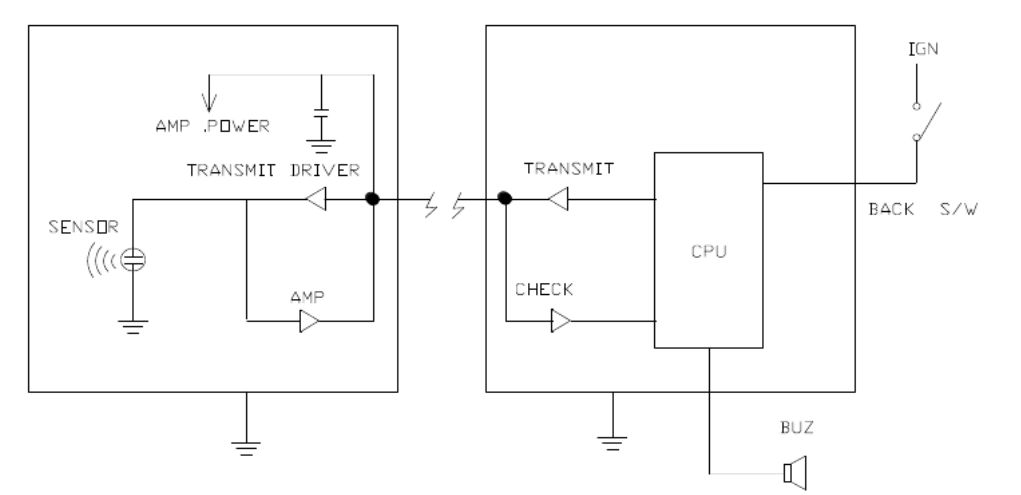
模拟式
模拟信号、传输过程中易受干扰及损耗,成本低,目前市场上使用率高。
工作方式 :传感器只负责发射和接收信号,未进行信号处理,模拟信号经一定长度的导线传输到 ECU 处理。
缺点:传感器接收到模拟信号,极易在传输过程中受到干扰及线上的损耗,造成系统侦测感度不稳定。
发射时,可能会干扰其它电器(如车载收音机)。
优点:成本低。
四线式数位
信号数字化,极大减少干扰问题;一般工艺只能将信号源及传感器驱动回路电源分开并且多数采取四线式做法。
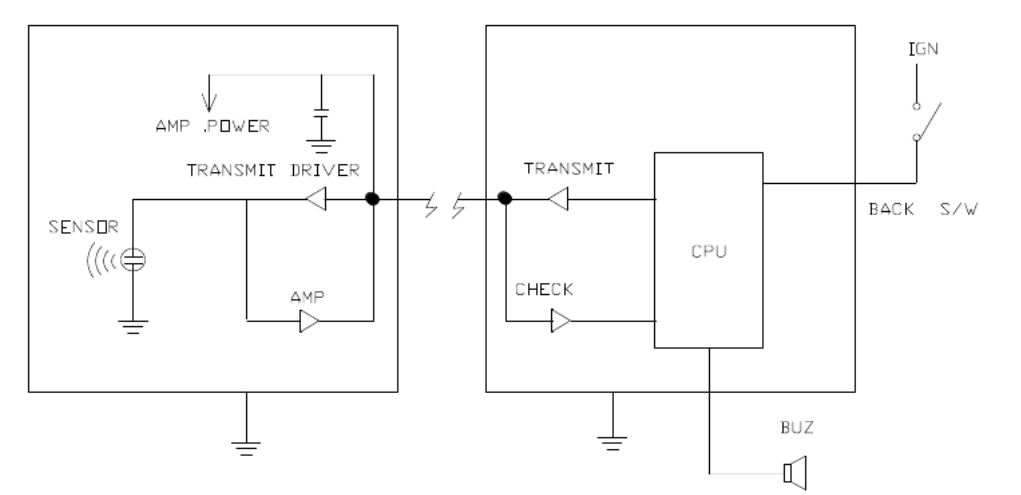
工作方式:将信号的发射信号 、接收信号 、传感器的工作电源、电源/信号公供地分开传输到传感器内部,
回波的放大(1 万倍以上)处理直接在 SENSOR 内部完成。
优点:从传感器到ECU的信号实现了数字化,极大地减少被干扰的可能,抗干扰性能大幅度提升。
缺点:增加车身线束,给售后装配带来一定困难。
二线式数位
优化线束使用量,成本在一定程度上降低;产品抗干扰能力强,但技术难度高。
工作方式:在四线式基础上转化过来的,它集供电、发射、接收信号于一体共用一条传输线,
将供电、发射、接收的信号在传感器内部转化为数字信号,并进行放大后送至主机 ECU 处理。
优点:优化线束的使用量,大幅度减少车体线束及接插件使用量,减低成本,产品抗干扰性和互换性都很好;
缺点:传感器接收的信号仍需通过传输线传至主机进行整形和运算处理,信号传输存在受干扰可能性。
三线式主动数位
独自完成信号发射接收及数据处理,几乎不存在干扰和损耗;具有非常好的EMC和EMI性能。
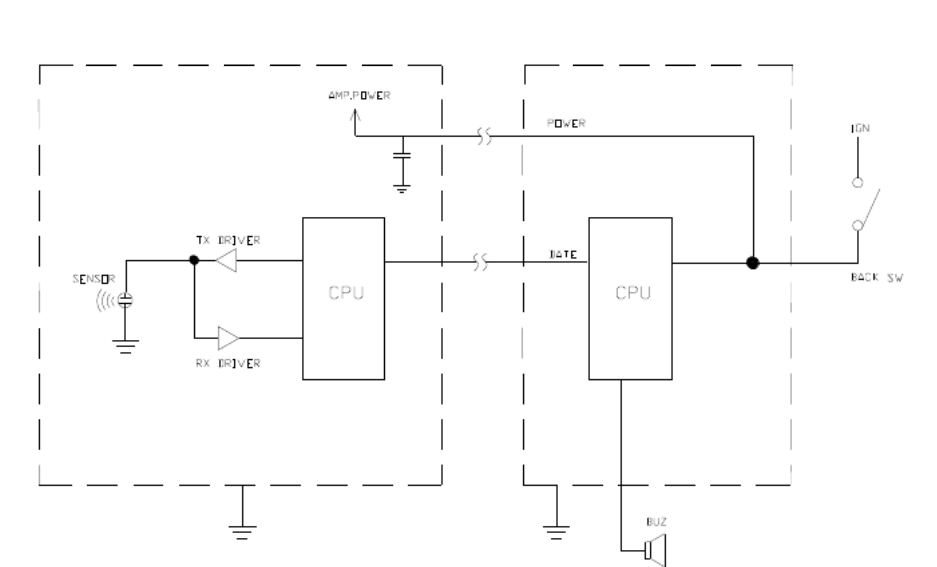
工作方式:每个倒车雷达传感器内部带有 CPU,独自完成信号的发射接收及数据处理,
主机通过一条通讯线与传感器进行命令、数据传输。三线分别为电源正极、电源地、信号线。
优点:基本不存在信号干扰及损失。EMC及EMI性能良好。减少车体线束及接插件使用量,减低成本。
缺点:技术难度高、成本高。
1.3.3 按封装方式分类
密闭式超声波传感器
防水型,多用于车载环境使用。
开放式超声波传感器
不防水,多用于室内环境使用。
1.4 性能参数
工作频率:压电晶片共振的频率,当它加到两端的交流电压的频率和晶体片的共振频率相同时,
输出能量最大,灵敏度也最高。常见工作频率:40KHz、48KHz、58KHz。
灵敏度:取决于制造晶体本身,气垫耦合系数大,灵敏度高。
指向性:超声波的开括角,即能够覆盖多大的探测范围。
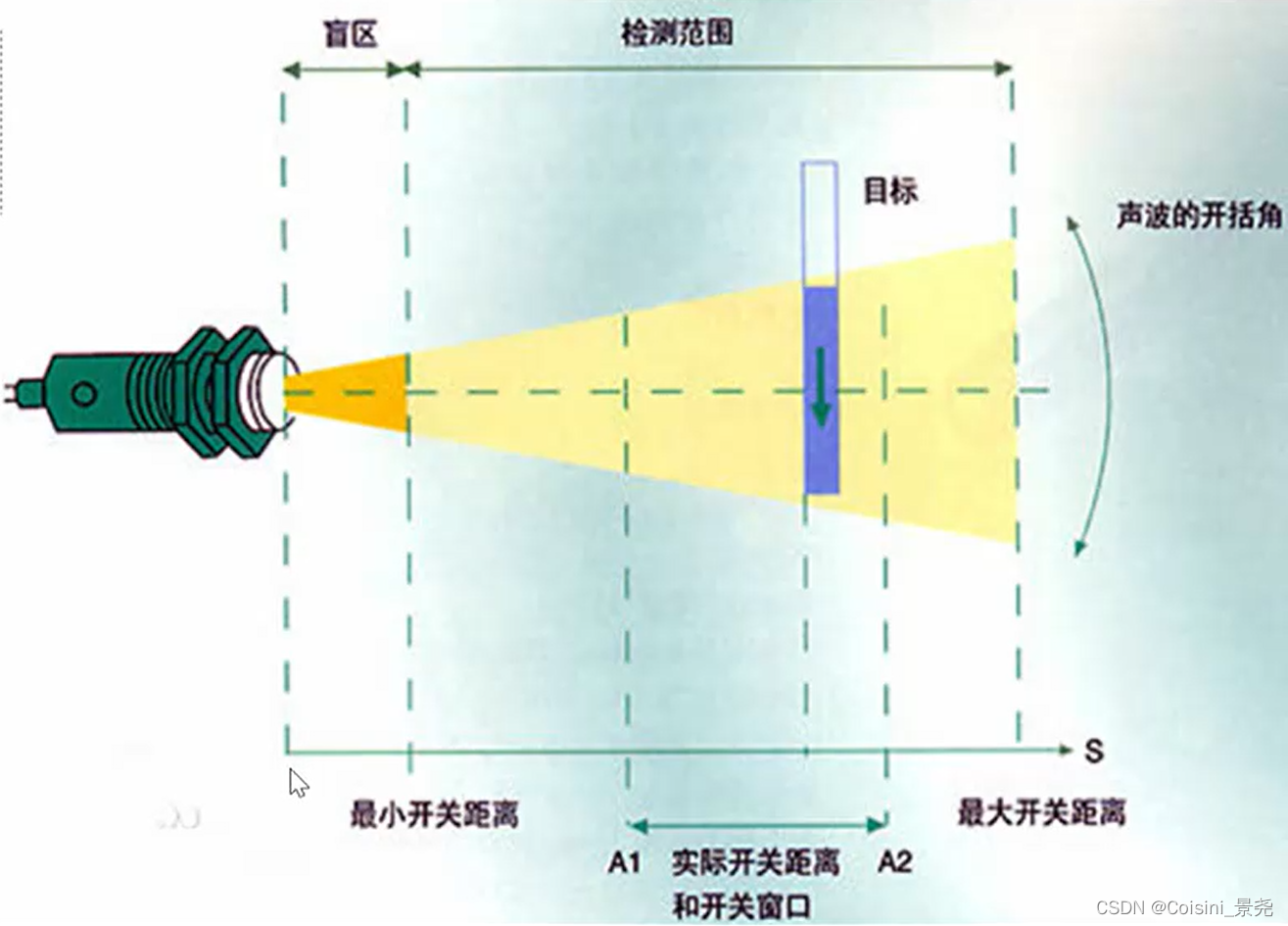
盲区:对于收发一体探头,撤消探头激励电压后,由于压电晶片固有的机械惯性,
压电晶片仍会作阻尼振荡并向外发射超声波,这就是余振。
如果探头在余振期间接收到被障碍物反射回来的回波信号,回波将与余振混在一起而无法区分。
因此会形成测距的盲区,测距盲区为(声速*余振长度)/2;以1.6ms的余振为例,测距盲区为0.272m。
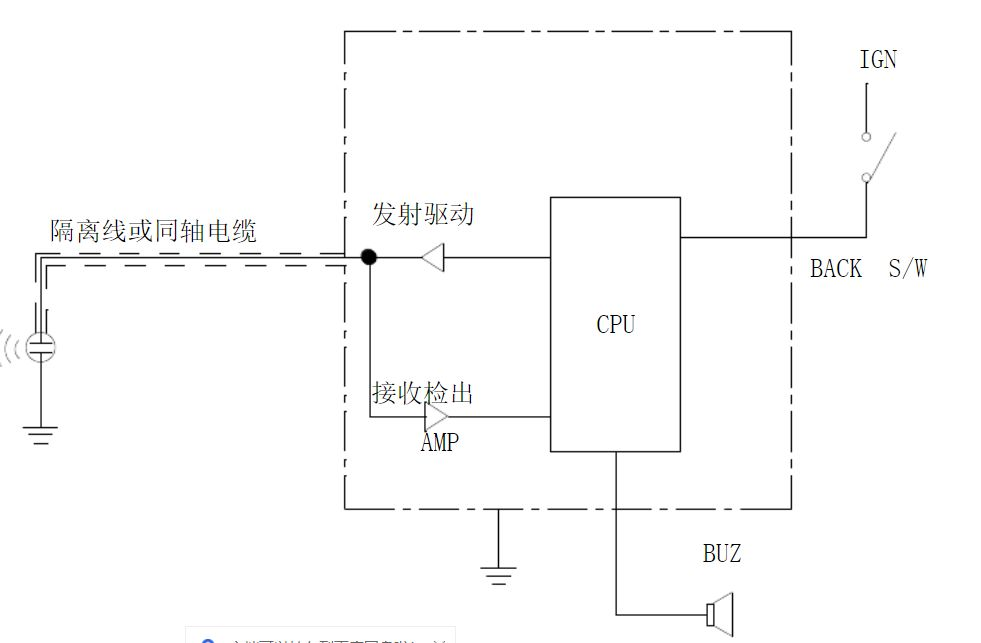
二、基本方案
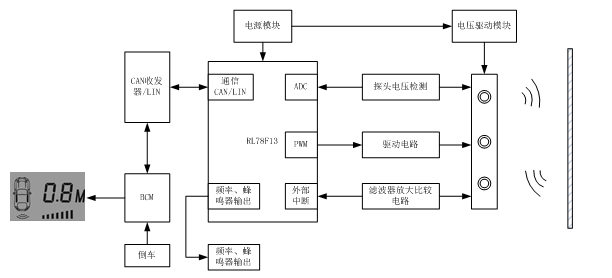
2.1 系统组成
2.2 设计要点
超声波传感器的问题:
温度问题
超声波传播速度,与环境温度有关,温差较大时,探测距离会有差异。
反射问题
指向误差:当被测物体和超声波传感器成一定角度的时候,所探测到距离和实际距离不同。地面反射:在凹凸不平的地面倒车时,探测到地面,可能产生不必要的报警。多次反射:声波经过多次反射,才能回到传感器被接受。因此探测的距离值并不是真实值。
同频干扰
当周围环境产生相近频段的噪音,超声波接收器如果接收到作为回波信号,则会误触发。
串扰问题
多个超声波传感器同时工作,会产生的超声波串扰。
余振问题
探头在余振期间接收,很难区分回波信号和余震信号,形成测距盲区。
针对以上问题,设计时需要注意以下几点:
2.2.1 温度补偿
探测环境温度,通过软件补偿因温度变化带来的超声波传播速度差异。
2.2.2 减小余振
余振时间通常为1.5ms~2ms,需要延时接收,但会形成探测盲区。
选型余振时间小的探头。
2.2.3 减少地面反射
根据探头的垂直探测角度,改善安装位置,避免产生地面回波。
加入软件滤波,如阶梯滤波,识别出地面回波,避免误报警。
2.2.4 分时测量+方向定位
为防止探头信号互相干扰,探头分时工作。
探头单发多收,采用三角定位算法,计算出真实距离。
2.2.5 增益控制
设置的放大倍数需兼顾远近距离
2.2.6 抗同频干扰
硬件检波+软件滤波
参考资料列表
倒车雷达主控芯片GM3101的功能特性分析.pdf
TDA4 泊车应用中的超声波雷达集成方案.pdf

 浙公网安备 33010602011771号
浙公网安备 33010602011771号