视觉SLAM第四讲李群与李代数习题
视觉SLAM第四讲李群与李代数习题
一、验证\(SO(3)、SE(3)、SIM(3)\)关于乘法成群
首先引入一下群的定义。
群 (Group) 是一种集合加上一种运算的代数结构。我们把集合记作 \(A\), 运算记作 \(.\),那么一个群可以记作 \(G=(A, \cdot)\) 。群要求这个运算满足以下几个条件:
封闭性: \(\forall a_1, a_2 \in A, \quad a_1 \cdot a_2 \in A\).
结合律: \(\forall a_1, a_2, a_3 \in A, \quad\left(a_1 \cdot a_2\right) \cdot a_3=a_1 \cdot\left(a_2 \cdot a_3\right)\).
么元: \(\exists a_0 \in A\), s.t. \(\forall a \in A, \quad a_0 \cdot a=a \cdot a_0=a\).
逆: \(\forall a \in A,\quad \exists a^{-1} \in A, \quad\) s.t. \(a \cdot a^{-1}=a_0\).
- 首先验证 \(SO(3)\)关于乘法成群
封闭性:
设任意\(R_1,R_2 \in SO(3)\),则有:
此时,\(R_1,R_2\)的乘法结果属于正交矩阵得证;
此时,\(R_1,R_2\)的乘法结果行列式值为1得证;
综上,对于任意\(R_1,R_2 \in SO(3)\),有\(R_1R_2 \in SO(3)\)。
结合律:
由于矩阵乘法是满足结合律的,所以有:
么元:
对于单位矩阵\(I \in SO(3)\),容易证明其是么元。
任意\(R \in SO(3)\)
逆:
根据\(SO(3)\)的定义,容易验证,对于任意的\(R \in SO(3),\exist (R^T = R^{-1})\in SO(3)\),使得\(RR_{-1} = I\)。
- 验证 \(SE(3)\)关于乘法成群\[SE(3) = \{\mathbf{T} = \begin{bmatrix} \mathbf{R} & \mathbf{t}\\ \mathbf{0} & 1 \end{bmatrix} \in \mathbb{R}^{4\times 4} | \mathbf{R} \in SO(3), \mathbf{t}\in \mathbb{R}^3 \} \]
封闭性:
设任意\(\mathbf{T_1} = \begin{bmatrix} \mathbf{R_1} & \mathbf{t_1}\\ \mathbf{0} & 1 \end{bmatrix},\mathbf{T_2} = \begin{bmatrix} \mathbf{R_2} & \mathbf{t_2}\\ \mathbf{0} & 1 \end{bmatrix}\),则有:
由上一题的证明,有\(R1R_2 \in SO(3)\),根据矩阵维数得到$R_1t_2+t_1 \in\mathbb{R}^3 $
所以,\(T_1T_2 \in SE(3)\)
结合律:
由于矩阵乘法是满足结合律的,所以有:
么元:
对于单位矩阵\(I \in SE(3)\),容易证明其是么元。
任意\(T \in SE(3)\)
逆:
根据\(SE(3)\)的定义,对于任意\(\mathbf{T} = \begin{bmatrix} \mathbf{R} & \mathbf{t}\\ \mathbf{0} & 1 \end{bmatrix} \in SE(3)\),我们设\(T' = \begin{bmatrix} \mathbf{R^{-1}} & \mathbf{-R^{-1}t}\\ \mathbf{0} & 1 \end{bmatrix} \in SE(3)\),
容易验证$TT' = I $
-
验证\(SIM(3)\)关于乘法成群
\(SIM(3)\),就是在\(T\)的基础上添加了一个尺度变化因子\(s\)。
其证明\(SE(3)\)类似,不再赘述。
二、验证\((\mathbb{R}^3,R,\times)\)构成李代数
首先引入一下李代数的定义。
李代数由一个集合\(V\),一个数域\(F\),一个二元运算\([,]\)组成,如果满足下面的条件,则称 \((\mathbb{V}, \mathbb{F},[,])\) 为一个李代数。
李代数满足如下性质:
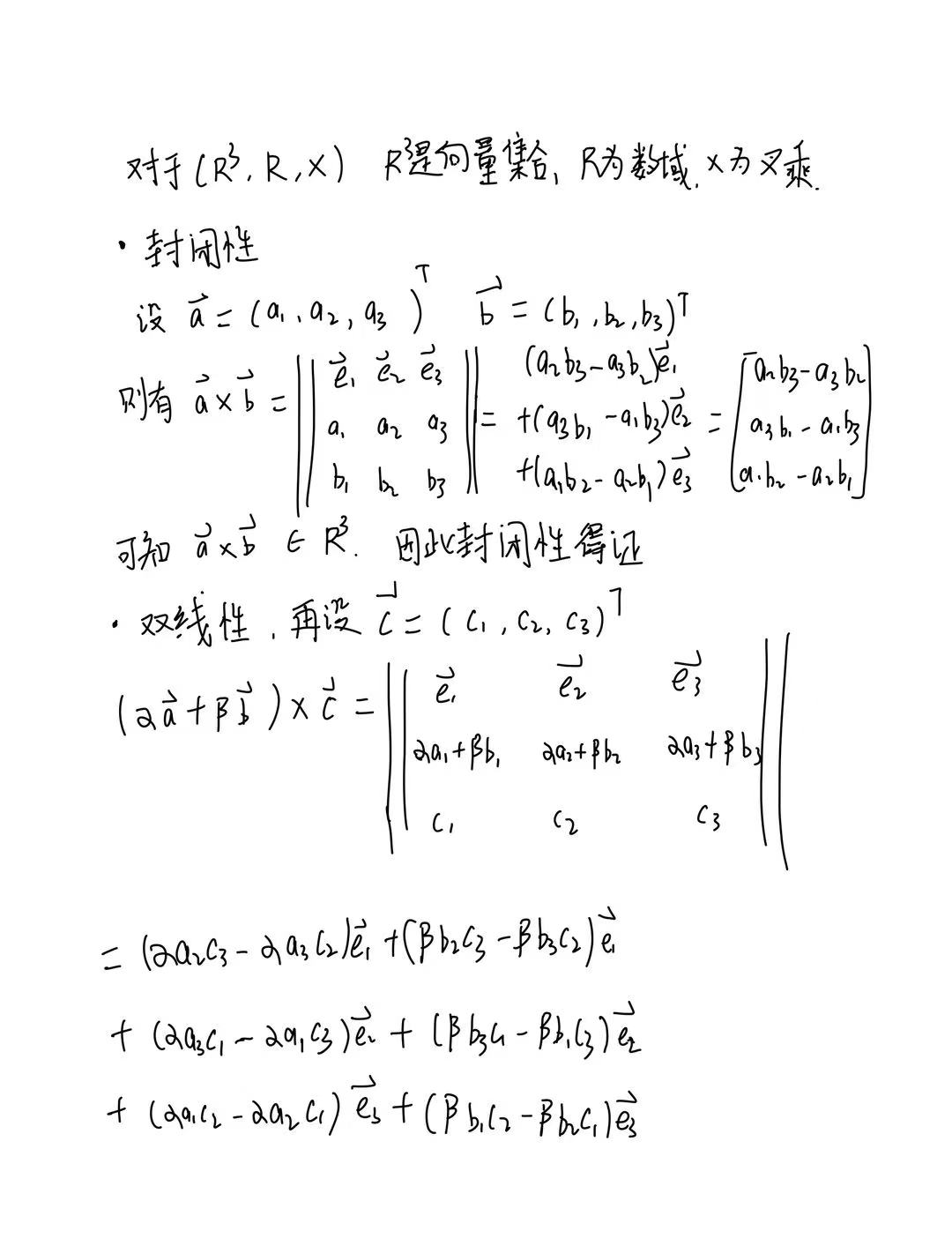
封闭性
\(\forall X, Y \in \mathbb{V}, 有[X,Y] \in \mathbb{V}\) ,
双线性
\(\forall X, Y,Z \in \mathbb{V}, a,b \in \mathbb{F}\) ,有:
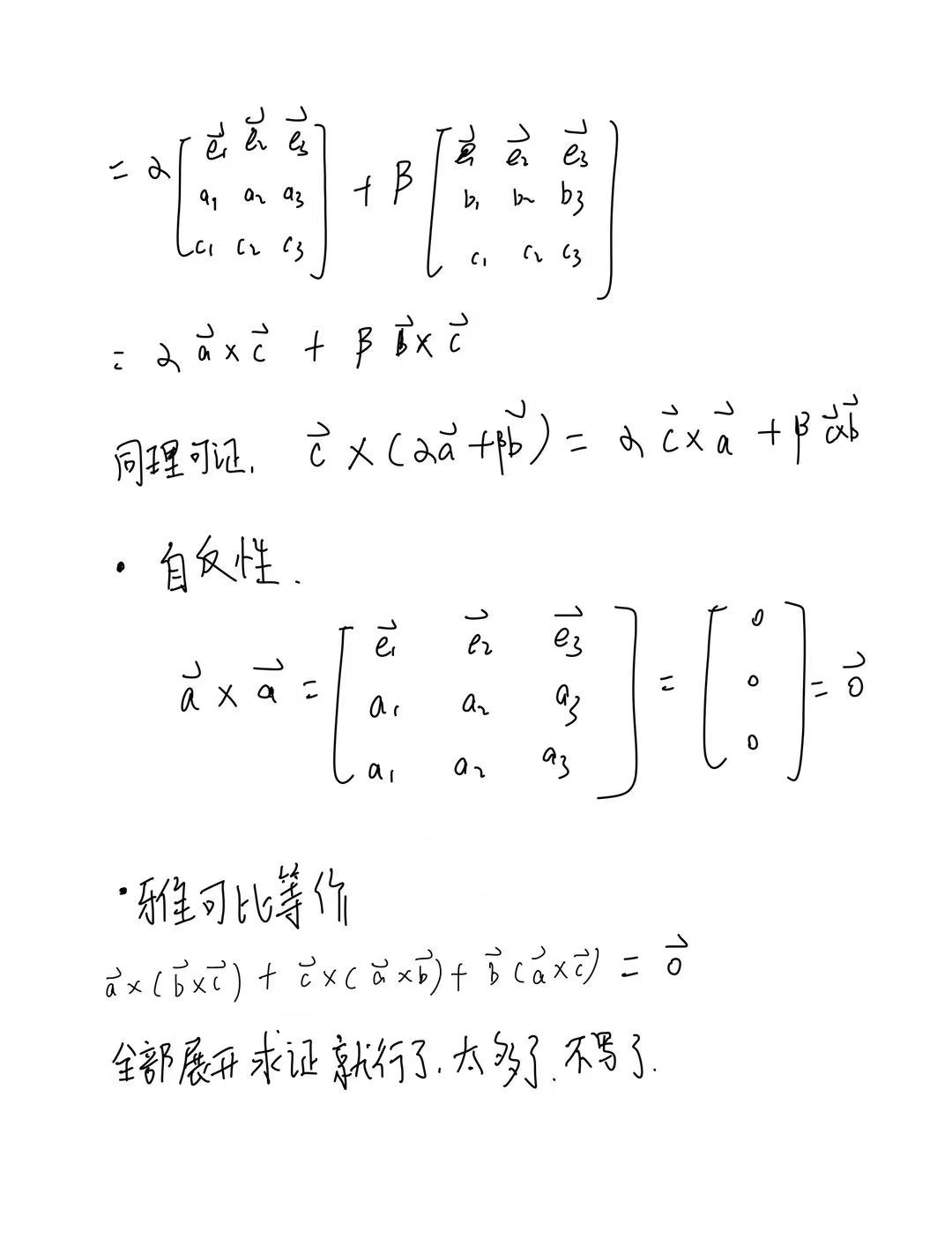
\[[a \boldsymbol{X}+b \boldsymbol{Y}, \boldsymbol{Z}]=a[\boldsymbol{X}, \boldsymbol{Z}]+b[\boldsymbol{Y}, \boldsymbol{Z}], \quad[\boldsymbol{Z}, a \boldsymbol{X}+b \boldsymbol{Y}]=a[\boldsymbol{Z}, \boldsymbol{X}]+b[\boldsymbol{Z}, \boldsymbol{Y}] \]
自反性
\(\forall \boldsymbol{X} \in \mathbb{V},[\boldsymbol{X}, \boldsymbol{X}]=\mathbf{0}\),
雅可比等价
\(\forall X, Y, Z \in \mathbb{V},[X,[Y, Z]]+[Z,[\boldsymbol{X}, \boldsymbol{Y}]]+[\boldsymbol{Y},[\boldsymbol{Z}, \boldsymbol{X}]]=0\).
三、验证$ \text { so (3) 和 } \mathbf{s e}(3) $属于李代数
这个和第二题类似,对于\(so(3)\)来说,它是定义在\(\mathbb{R^3}\)上的向量,我们记作:\(\phi\),其李括号是
然后安装第二题的思路,以此证明即可。
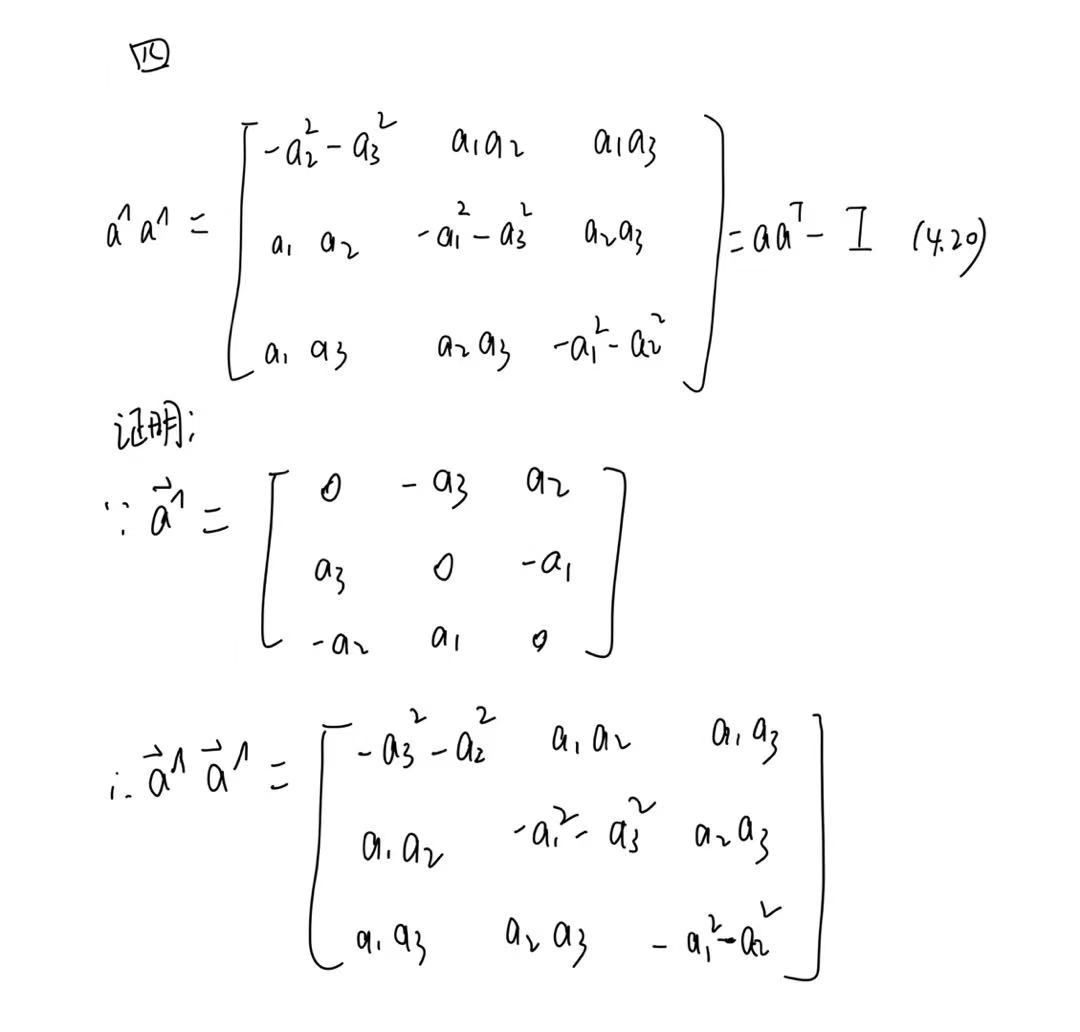
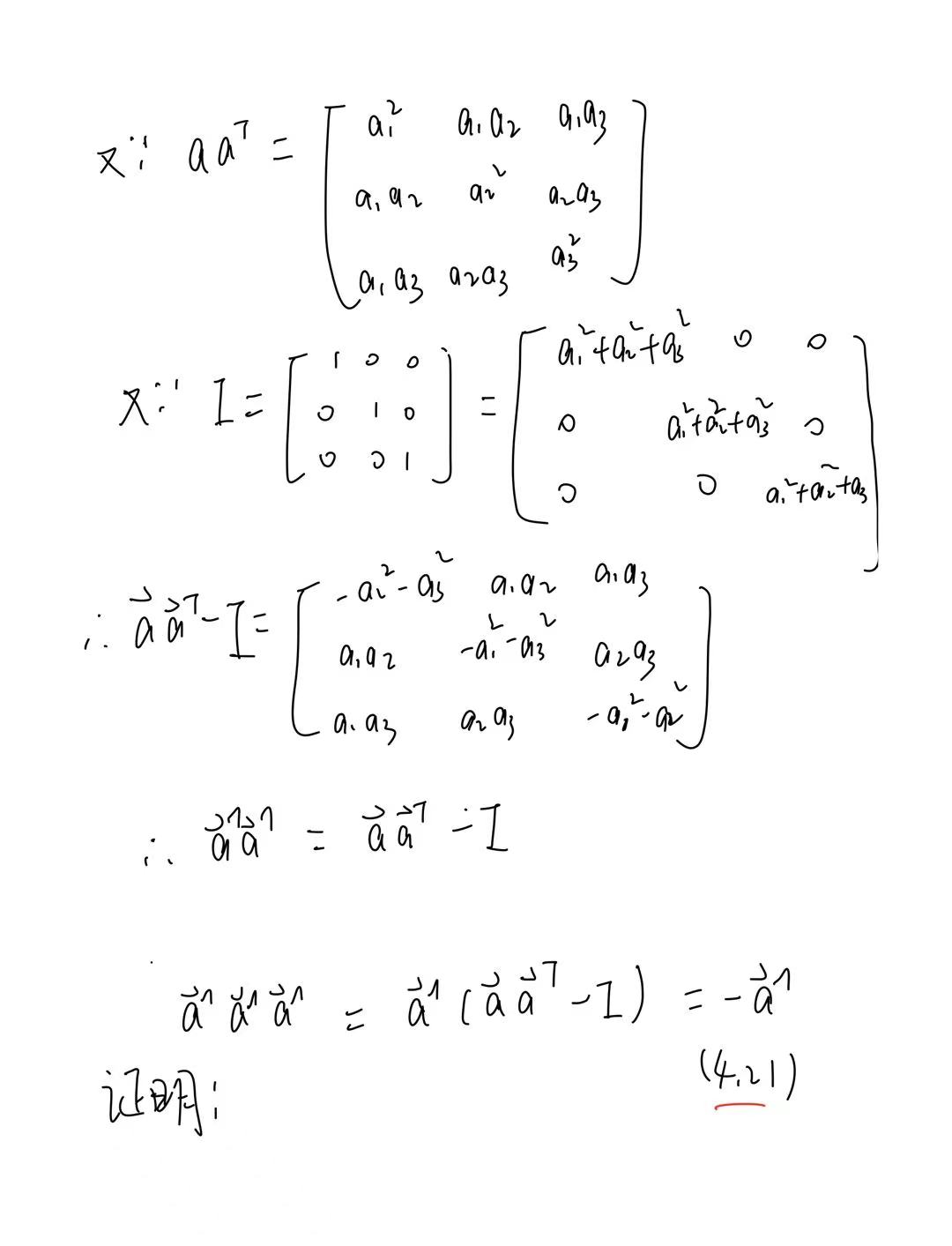
四、验证(4.20)和(4.21)
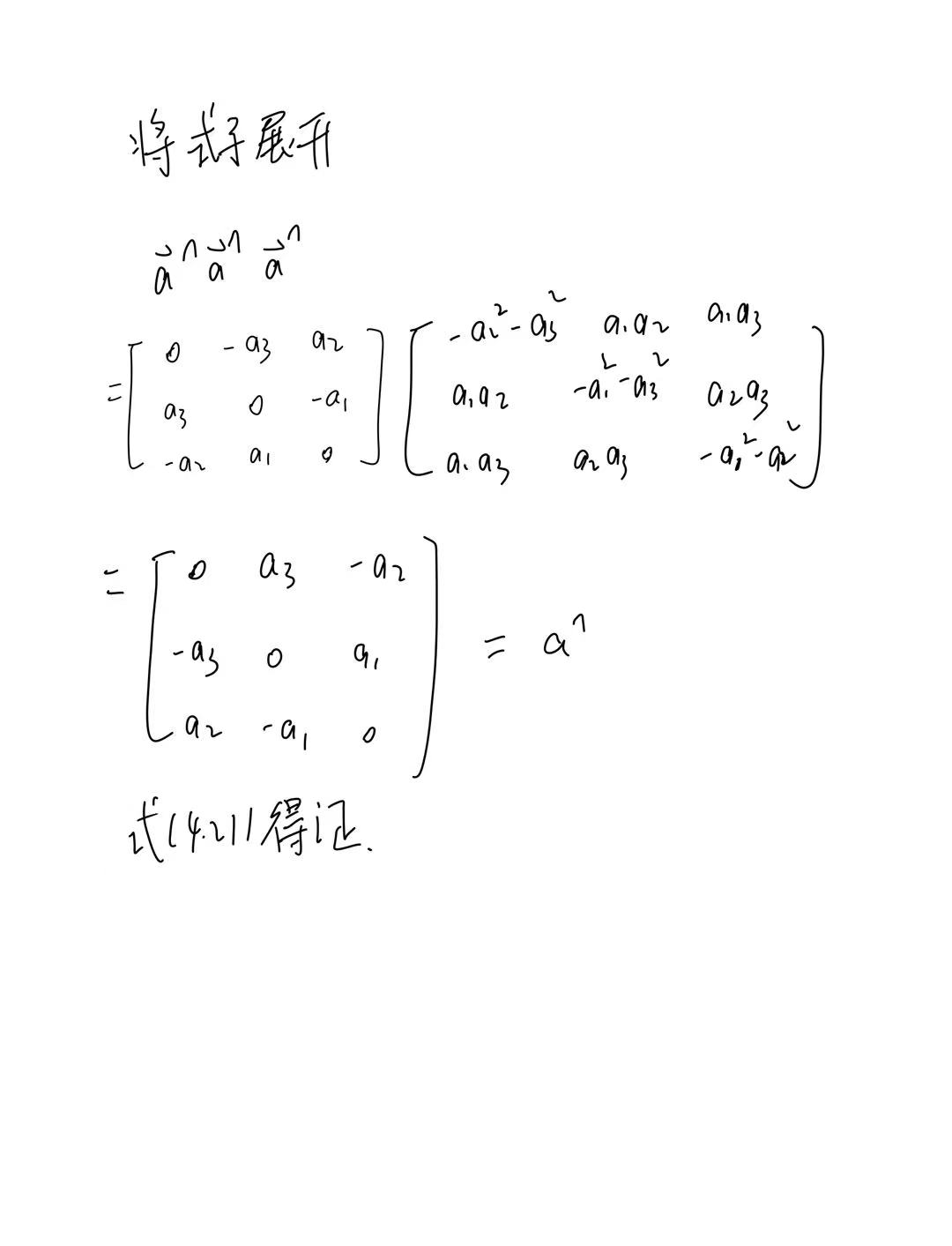
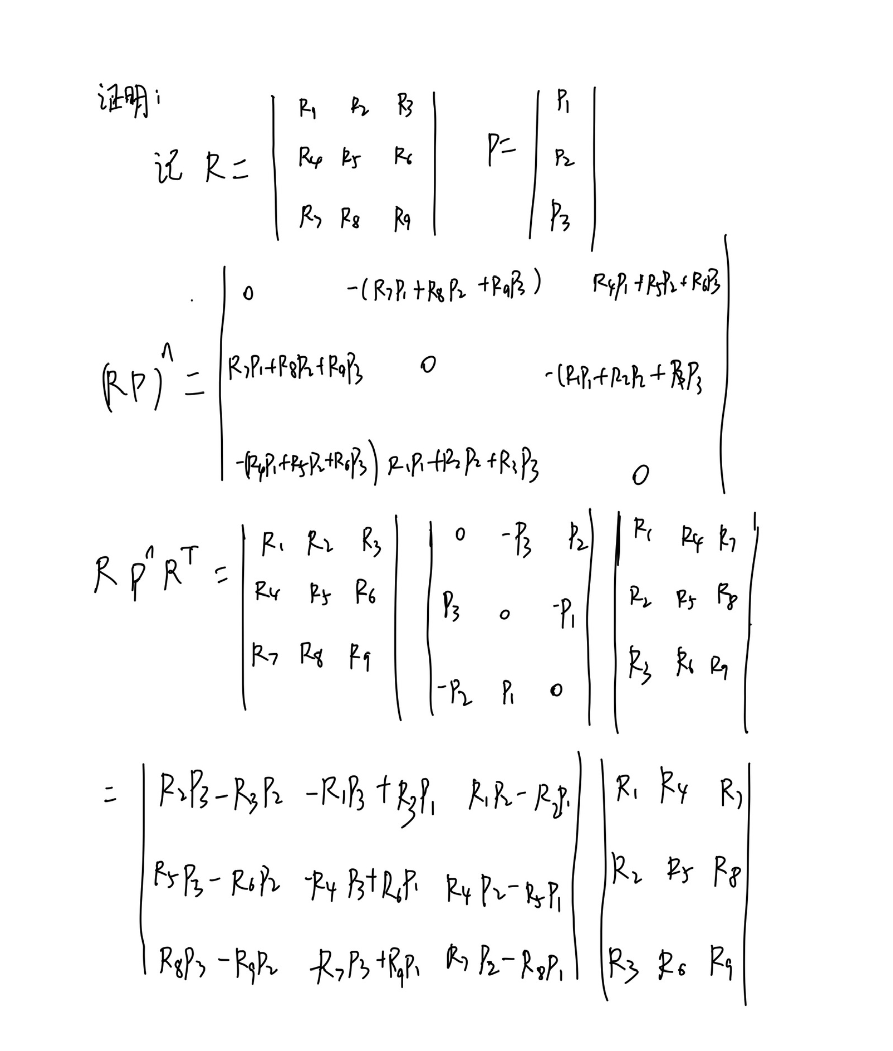
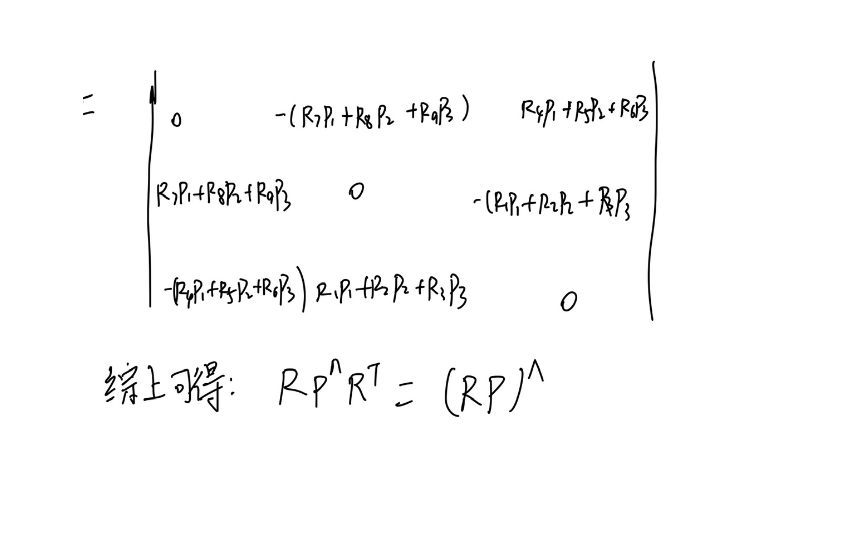
五、证明\(R \hat{p}R^T = (R\hat{p})\)
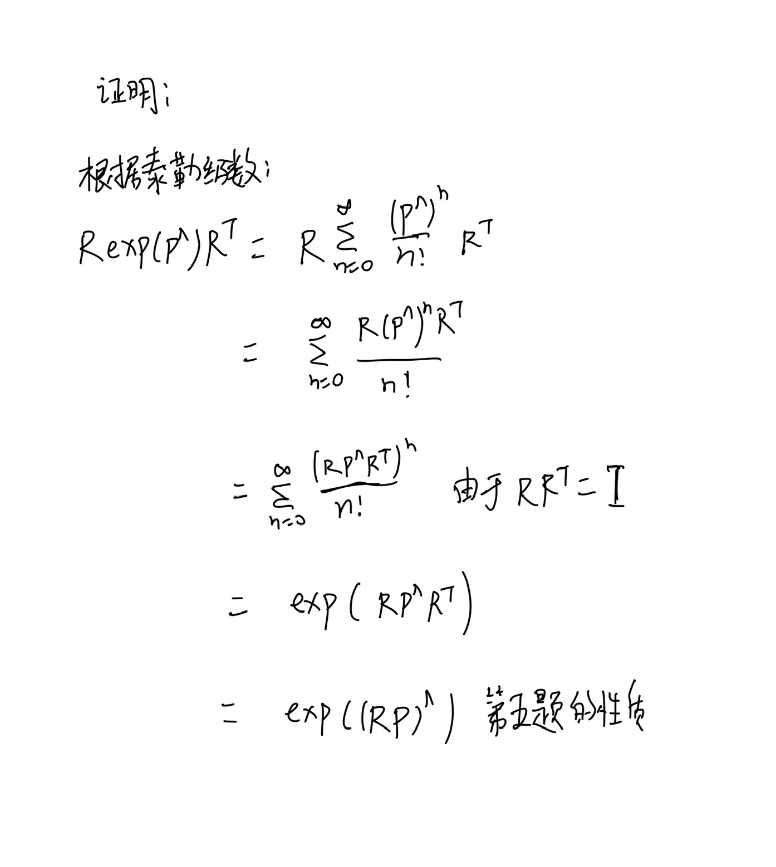
六、\(\text {证明SO(3)的伴随性质 } \operatorname{Rexp}(\hat{p}) R^T=\exp ((\hat{R} p))\)
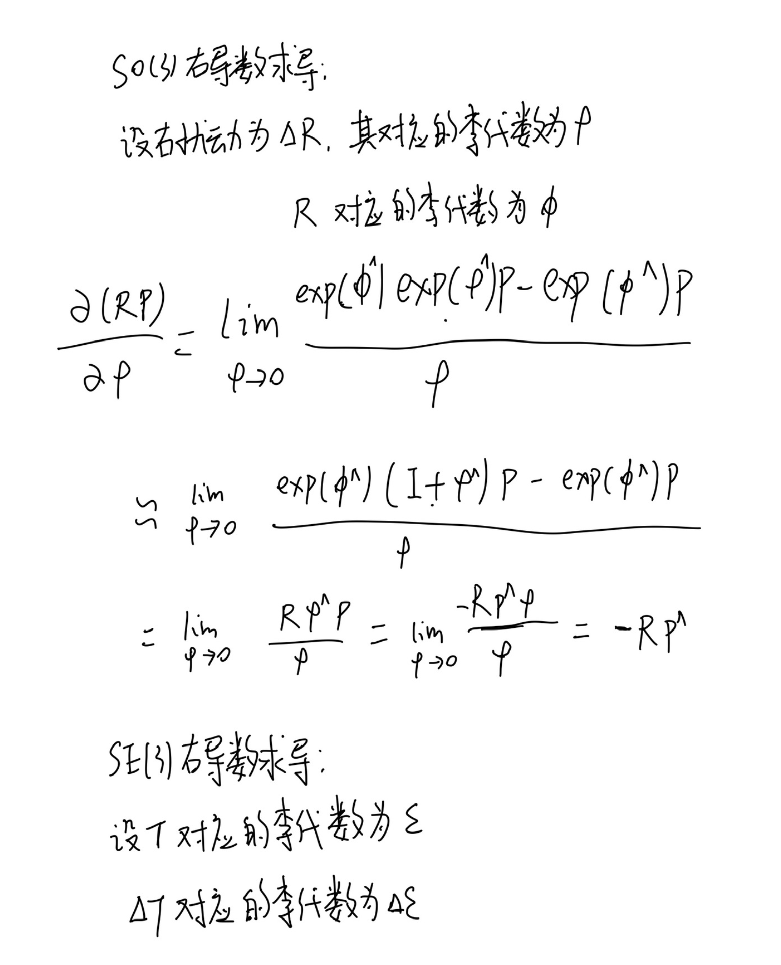
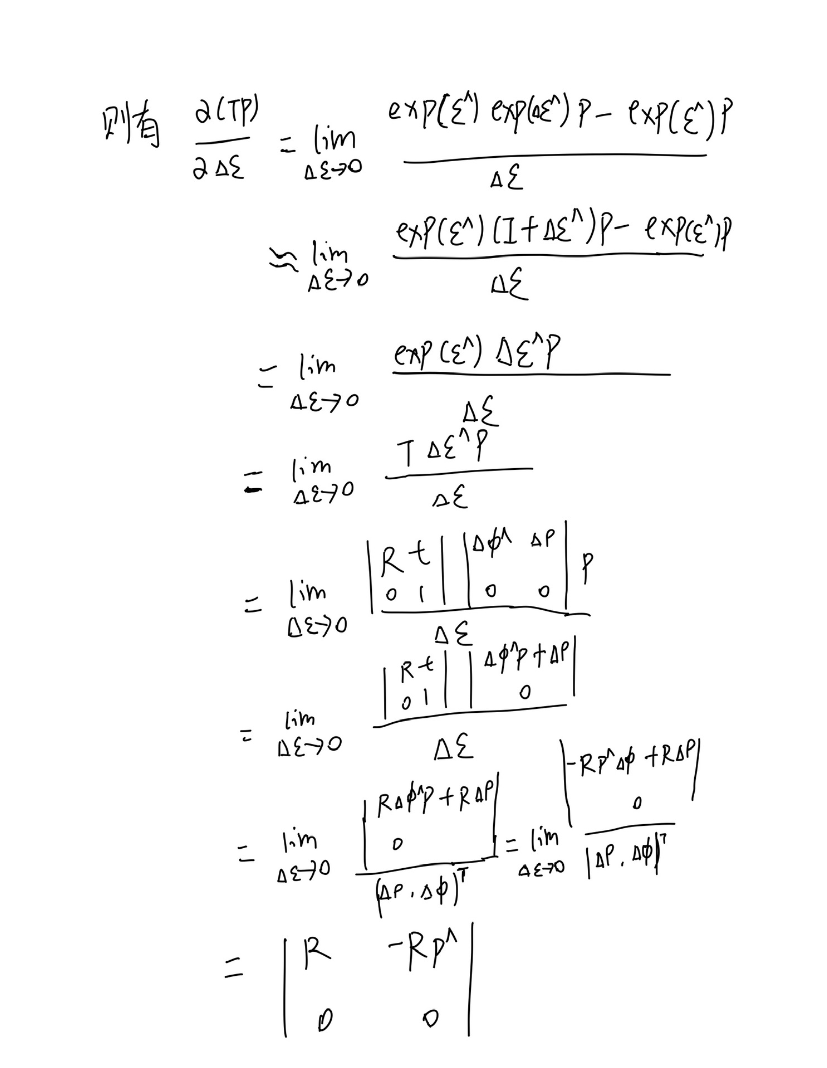
七、仿照左扰动的推导,推导SO(3)和SE(3)在右扰动下的导数。
本文来自博客园,作者:CuriosityWang,转载请注明原文链接:https://www.cnblogs.com/curiositywang/p/17251007.html

 浙公网安备 33010602011771号
浙公网安备 33010602011771号