
linux驱动2.3按键中断-定时器防抖
本节目标:
通过定时器来防止按键抖动,测试程序是使用上节的:阻塞操作的测试程序
一、引入
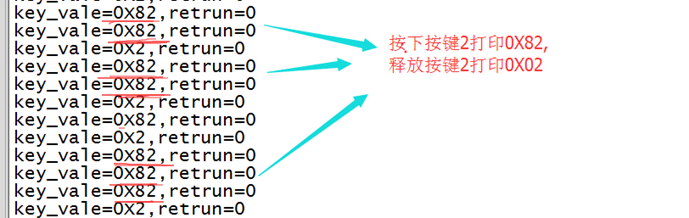
如下图所示,在没有定时器防抖情况下,按键没有稳定之前会多次进入中断,使得输出多个相同信息出来
按键波形图,如下所示:
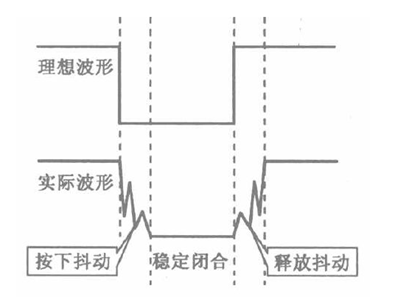
问:如何消去按键抖动?
答:通过定时器延时10ms,然后每当按键进入中断时就更新定时器延时10ms,若延时10ms到了说明已经过了抖动范围,然后再打印按键电平信息
二、定时器结构体和函数介绍
我们先来看看两个全局变量:
jiffies: 是系统时钟,全局变量,默认每隔10ms加1
HZ:是每S的频率,通过系统时钟换算出来,比如每隔10ms加1,那么HZ就等于100。
2.1、定时器结构体timer_list
timer_list常用结构体成员如下所示:
1)data //传递到*function超时处理函数的参数,可以通过参数来获取信息
2)expires //定时器到期的时间,当expires小于等于jiffies时,这个定时器便到期并调用定时器超时处理函数,然后就不会再调用了,比如要使用10ms后到期,赋值(jiffies+HZ/100)即可
3)void (*function)(unsigned long) //定时器超时处理函数。
2.2、定时器常用函数
init_timer(struct timer_list*) //定时器初始化结构体函数,
add_timer(struct timer_list*) //往系统添加定时器,告诉内核有个定时器结构体
mod_timer(struct timer_list *, unsigned long jiffier_timerout) //修改定时器的超时时间为jiffies_timerout, 当expires小于等于jiffies时,便调用定时器超时处理函数。
timer_pending(struct timer_list *) //定时器状态查询,如果在系统的定时器列表中则返回1,否则返回0;
del_timer(struct timer_list*) //删除定时器,在本驱动程序出口函数sixth_drv_exit()里添加
三、修改驱动程序实现定时器消抖动并测试
3.1、首先定义一个定时器结构体:
static struct timer_list buttons_timer; //定义定时器结构体
3.2、在init入口函数中初始化定时器结构体:
init_timer(&buttons_timer); //初始化结构体
/*成员.data未使用
不需要定时器到期时间,所以成员.expires无需初始化,默认为0,由于小于等于jiffies,会进入一次定时器超时函数*/
buttons_timer. function= buttons_timer_ function;
add_timer(&buttons_timer); //告诉内核,有一个定时器
注:以上3步可以用函数 setup_timer(time,func,data)代替,该函数实现赋值并初始化定时器,比手动设置更方便
3.3、在exit出口函数中删除定时器:
del_timer(&buttons_timer); //删除定时器
3.4、定义全局变量*irq_dev_id并在中断服务函数中获取dev_id
struct pin_desc *irq_dev_id ; //定义全局变量获取dev_id
并修改中断服务函数:
static irqreturn_t buttons_irq (int irq, void *dev_id) //中断服务函数
{
irq_dev_id =(struct pin_desc *)dev_id; //获取引脚描述结构体
/*每产生一次中断,则更新定时器10ms超时 */
mod_timer(&buttons_timer, jiffies+HZ/100);
return IRQ_RETVAL(IRQ_HANDLED);
}
注意: jiffies+HZ/100 也可以直接换成 jiffies + msecs_to_jiffies(10),更加方便
3.5、超时函数
当10ms超时到了,进入定时器超时函数,处理*irq_dev_id来判断是哪个按键按下的
static void buttons_timer_function(unsigned long data) //定时器超时函数
{
unsigned int pin_val=0;
if(!irq_dev_id) //初始化时,由于定时器.expires成员=0,会进入一次,若irq_dev_id为0则退出
{
printk("expires: timer out\n");
return ;
}
pin_val=s3c2410_gpio_getpin(irq_dev_id->pin); //获取按键值
if(pin_val)
{
/*按下 (下降沿),清除0x80*/
key_val=irq_dev_id->pin_status&0xef;
}
else
{
/*没有按下(上升沿),加上0x80*/
key_val=irq_dev_id->pin_status|0x80;
}
even_press=1; //退出等待队列
wake_up_interruptible(&button_wait); //唤醒 中断
kill_fasync(&button_async, SIGIO, POLL_IN); //发送SIGIO信号给应用层
}
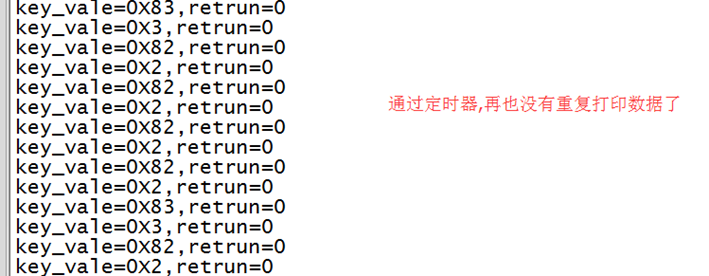
3.6、测试效果
如下图所示,我们运行测试程序,来快速按下按键试试:
四、代码总览
测试程序代码使用阻塞操作的测试程序。
驱动程序sixth.c代码:
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/fs.h>
#include <linux/init.h>
#include <linux/delay.h>
#include <linux/irq.h>
#include <asm/irq.h>
#include <asm/arch/regs-gpio.h>
#include <asm/hardware.h>
#include <asm/uaccess.h>
#include <asm/io.h>
#include <linux/poll.h>
static struct timer_list buttons_timer; //定义定时器结构体
struct pin_desc *irq_dev_id ; //定义全局变量获取dev_id
static struct class *sixthdrv_class;
static struct class_device *sixthdrv_class_devs;
/*定义互斥锁button_lock,被用来后面的down()和up()使用 */
static DECLARE_MUTEX(button_lock);
/* 声明等待队列类型中断 button_wait */
static DECLARE_WAIT_QUEUE_HEAD(button_wait);
/* 异步信号结构体变量 */
static struct fasync_struct * button_async;
/*
* 定义中断事件标志
* 0:进入等待队列 1:退出等待队列
*/
static int even_press=0;
/*
* 定义全局变量key_val,保存key状态
*/
static int key_val=0;
/*
*引脚描述结构体
*/
struct pin_desc{
unsigned int pin;
unsigned int pin_status;
};
/*
*key初始状态(没有按下): 0x81,0x82,0x83,0x84
*key状态(按下): 0x01,0x02,0x03,0x04
*/
struct pin_desc pins_desc[4]={
{S3C2410_GPF0,0x01 },
{S3C2410_GPF2, 0x02 },
{S3C2410_GPG3, 0x03 },
{S3C2410_GPG11,0x04},
} ;
int sixth_drv_class(struct inode *inode, struct file *file) //卸载中断
{
free_irq(IRQ_EINT0,&pins_desc[0]);
free_irq(IRQ_EINT2,&pins_desc[1]);
free_irq(IRQ_EINT11,&pins_desc[2]);
free_irq(IRQ_EINT19,&pins_desc[3]);
/*释放信号量*/
up(&button_lock);
return 0;
}
/*
* 确定是上升沿还是下降沿
*/
static irqreturn_t buttons_irq (int irq, void *dev_id) //中断服务函数
{
irq_dev_id =(struct pin_desc *)dev_id; //获取引脚描述结构体
/*每产生一次中断,则更新定时器10ms超时 */
mod_timer(&buttons_timer, jiffies+HZ/100);
return IRQ_RETVAL(IRQ_HANDLED);
}
static int sixth_drv_open(struct inode *inode, struct file *file)
{
if( file->f_flags & O_NONBLOCK ) //非阻塞操作,获取不到则退出
{
if(down_trylock(&button_lock) )
return -1;
}
else //阻塞操作,获取不到则进入休眠
{
down(&button_lock);
}
request_irq(IRQ_EINT0,buttons_irq,IRQT_BOTHEDGE,"S1",&pins_desc[0]);
request_irq(IRQ_EINT2, buttons_irq,IRQT_BOTHEDGE, "S2", &pins_desc[1]);
request_irq(IRQ_EINT11, buttons_irq,IRQT_BOTHEDGE, "S3", &pins_desc[2]);
request_irq(IRQ_EINT19, buttons_irq,IRQT_BOTHEDGE, "S4", &pins_desc[3]);
return 0;
}
static int sixth_drv_read(struct file *file, const char __user *buf, size_t count, loff_t * ppos)
{
if( file->f_flags & O_NONBLOCK ) //非阻塞操作,获取不到则退出
{
if(!even_press ) //没有按键按下
return -1;
}
/*阻塞操作,则直接进入休眠状态,直到有按键按下为止*/
/*进程 进入等待队列(休眠状态)*/
wait_event_interruptible(button_wait, even_press);
/*有按键按下,退出等待队列,上传key_val 给用户层*/
if(copy_to_user(buf,&key_val,sizeof(key_val)))
return EFAULT;
even_press=0;
return 0;
}
static unsigned sixth_poll(struct file *file, poll_table *wait)
{
unsigned int mask = 0;
poll_wait(file, &button_wait, wait); // 不会立即休眠
if (even_press)
mask |= POLLIN | POLLRDNORM;
return mask;
}
static int sixth_fasync (int fd, struct file *file, int on)
{
return fasync_helper(fd, file, on, & button_async); //初始化button_async结构体,就能使用kill_fasync()了
}
static struct file_operations sixth_drv_fops={
.owner = THIS_MODULE,
.open = sixth_drv_open,
.read = sixth_drv_read,
.release=sixth_drv_class, //里面添加free_irq函数,来释放中断服务函数
.poll = sixth_poll,
.fasync= sixth_fasync, //初始化异步信号函数
};
static void buttons_timer_function(unsigned long data) //定时器超时函数
{
unsigned int pin_val=0;
if(!irq_dev_id) //定时器.expires成员=0,会进入一次,若irq_dev_id为0则退出
{
printk("expires: timer out\n");
return ;
}
pin_val=s3c2410_gpio_getpin(irq_dev_id->pin);
if(pin_val)
{
/* 按下 (下降沿),清除0x80*/
key_val=irq_dev_id->pin_status&0xef;
}
else
{
/*没有按下(上升沿),加上0x80*/
key_val=irq_dev_id->pin_status|0x80;
}
even_press=1; //退出等待队列
wake_up_interruptible(&button_wait); //唤醒 中断
kill_fasync(&button_async, SIGIO, POLL_IN); //发送SIGIO信号给应用层
}
volatile int sixth_major;
static int sixth_drv_init(void)
{
init_timer(&buttons_timer); //初始化定时器
buttons_timer. function= buttons_timer_function; //定时器超时函数
add_timer(&buttons_timer); //添加到内核中
sixth_major=register_chrdev(0,"sixth_drv",&sixth_drv_fops); //创建驱动
sixthdrv_class=class_create(THIS_MODULE,"sixth_dev"); //创建类名
sixthdrv_class_devs=class_device_create(sixthdrv_class, NULL, MKDEV(sixth_major,0), NULL,"buttons");
return 0;
}
static int sixth_drv_exit(void)
{
unregister_chrdev(sixth_major,"sixth_drv"); //卸载驱动
class_device_unregister(sixthdrv_class_devs); //卸载类设
class_destroy(sixthdrv_class); //卸载类
del_timer(&buttons_timer); //删除定时器
return 0;
}
module_init(sixth_drv_init);
module_exit(sixth_drv_exit);
MODULE_LICENSE("GPL v2");
}
