
从零开始游戏开发——2.1 向量
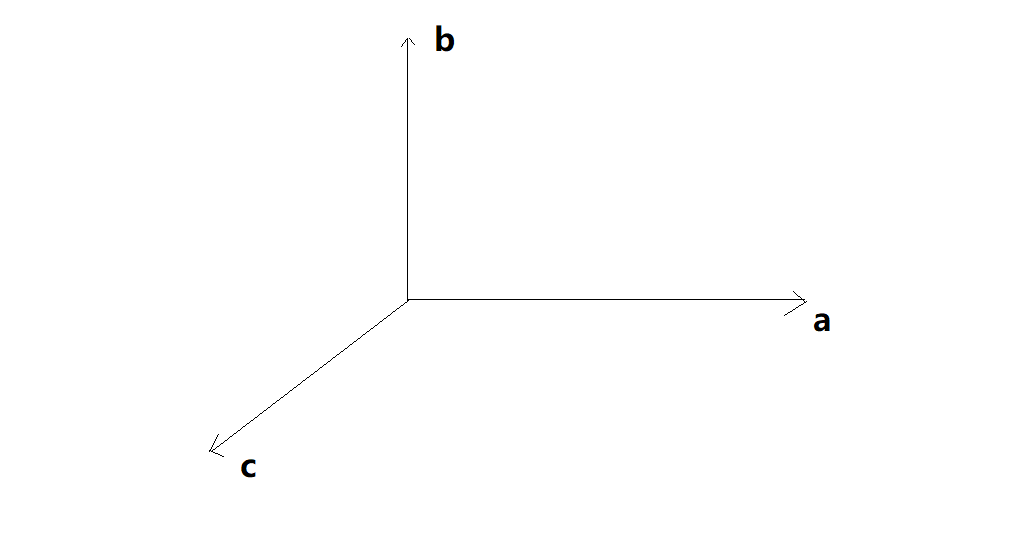
在介绍向量前,首先要介绍下坐标系统,因为向量是依赖于坐标系统的,最常用的是笛卡尔直角坐标系。坐标系分为左手坐标系和右手坐标系,如下图,当我们使用向量[a,b,c]来做为我们的坐标系时,使用的是右手坐标系,而使用[c,b,a] 做为坐标系时,则使用了左手坐标系统,即两个基向量进行叉乘a x b = c时使用的是右手坐标系,而c x b = -a则使用的是左手坐标系。我们这里使用的是右手坐标系。
在游戏中,我们会用到点和向量两个点概念,点是空间中的位置,而向量具有大小和方向,在程序代码中,既可以使用类Vecctor3来表示点,也可以用来表示向量。在1.1节中,计算三角形的旋转时,初步用了向量的概念。我们使用类的模板来定义C++向量类代码如下:
1 template <typename T> 2 class Vector3 3 { 4 public: 5 Vector3(T x, T y, T z); 6 Vector3(T v[3]); 7 T Length(); 8 Vector3<T> &Normalize(); 9 T DotProduct(const Vector3<T> &v) const; 10 Vector3<T> CrossProduct(const Vector3<T> &v) const; 11 Vector3<T> &RotateByX(T v); 12 Vector3<T> &RotateByY(T v); 13 Vector3<T> &RotateByZ(T v); 14 15 16 Vector3<T> operator+(const Vector3<T> &v)const; 17 Vector3<T> operator-(const Vector3<T> &v)const; 18 Vector3<T> operator*(const Vector3<T> &v)const; 19 20 union 21 { 22 struct 23 { 24 T x, y, z; 25 }; 26 T v[3]; 27 }; 28 };
上面代码定义了向量的一些基本操作,这里对坐标的定义使用了union并声明为public,以可以方便的使用x,y,z值或是通过v[1],v[2],v[3]这种下标的方式对坐标值访问,而不是增加如SetX()、GetX()这样的冗余的操作。
具体的代码定义如下:
1 template <typename T> 2 Vector3<T>::Vector3(T x, T y, T z) 3 :x(x), y(y), z(z) 4 { 5 } 6 7 template <typename T> 8 Vector3<T>::Vector3(T v[3]) 9 { 10 memcpy(this->v, v, sizeof(this->v)); 11 } 12 13 14 template <typename T> 15 T Vector3<T>::Length() 16 { 17 return sqrt(x * x + y * y + z * z); 18 } 19 20 template <typename T> 21 Vector3<T> &Vector3<T>::Normalize() 22 { 23 T len = Length(); 24 if (len > 0) 25 { 26 T invLen = 1 / len; 27 x *= invLen; 28 y *= invLen; 29 z *= invLen; 30 } 31 return *this; 32 } 33 34 template <typename T> 35 T Vector3<T>::DotProduct(const Vector3<T> &v) const 36 { 37 return x * v.x + y * v.y + z * v.z; 38 } 39 40 template <typename T> 41 Vector3<T> Vector3<T>::CrossProduct(const Vector3<T> &v) const 42 { 43 return Vector3<T>( 44 y * v.z - z * v.y, 45 z * v.x - x * v.z, 46 x * v.y - y * v.x 47 ); 48 } 49 50 template <typename T> 51 Vector3<T> &Vector3<T>::RotateByX(T v) 52 { 53 T c = static_cast<T>(cos(static_cast<long double>(v))); 54 T s = static_cast<T>(sin(static_cast<long double>(v))); 55 T tmpy = y * c - z * s; 56 T tmpz = y * s + z * c; 57 y = tmpy; 58 z = tmpz; 59 return *this; 60 } 61 62 template <typename T> 63 Vector3<T> &Vector3<T>::RotateByY(T v) 64 { 65 T c = static_cast<T>(cos(static_cast<long double>(v))); 66 T s = static_cast<T>(sin(static_cast<long double>(v))); 67 T tmpx = x * c + z * s; 68 T tmpz = -x * s + z * c; 69 x = tmpx; 70 z = tmpz; 71 return *this; 72 } 73 74 template <typename T> 75 Vector3<T> &Vector3<T>::RotateByZ(T v) 76 { 77 T c = static_cast<T>(cos(static_cast<long double>(v))); 78 T s = static_cast<T>(sin(static_cast<long double>(v))); 79 T tmpx = x * c - y * s; 80 T tmpy = x * s + y * c; 81 x = tmpx; 82 y = tmpy; 83 return *this; 84 } 85 86 template <typename T> 87 Vector3<T> Vector3<T>::operator+(const Vector3<T> &v) const 88 { 89 return Vector3<T>(x + v.x, y + v.y, z + v.z); 90 } 91 92 template <typename T> 93 Vector3<T> Vector3<T>::operator-(const Vector3<T> &v) const 94 { 95 return Vector3<T>(x - v.x, y - v.y, z - v.z); 96 } 97 98 template <typename T> 99 Vector3<T> Vector3<T>::operator*(const Vector3<T> &v) const 100 { 101 return Vector3<T>(x * v.x, y * v.y, z * v.z); 102 }
上述代码在计算绕坐标轴旋转时,由于计算非常简单,采用了第1.1节中方式,直接使用三角函数进行计算,而并没有使用矩阵或者四元数去额外定义一个对象来处理,当然涉及到更复杂的空间变换时,则是矩阵和四元数的拿手好戏了。为了方便使用,提供如下定义来对向量和点进行定义:
1 typedef Vector3<float> Vector3f; 2 typedef Vector3f Point3f; 3 typedef Vector3<double> Vector3d; 4 typedef Vector3d Point3d;
本文来自博客园,作者:毅安,转载请注明原文链接:https://www.cnblogs.com/primarycode/p/16395453.html,文章内容同步更新微信公众号:“游戏开发实战”或“GamePrimaryCode”
