ubuntu 20.04源码编译安装ros2 humble
虚拟机
官网下载ubuntu-20.04.6-desktop-amd64.iso,创建新的虚拟机,虚拟机配置如下
配置及安装
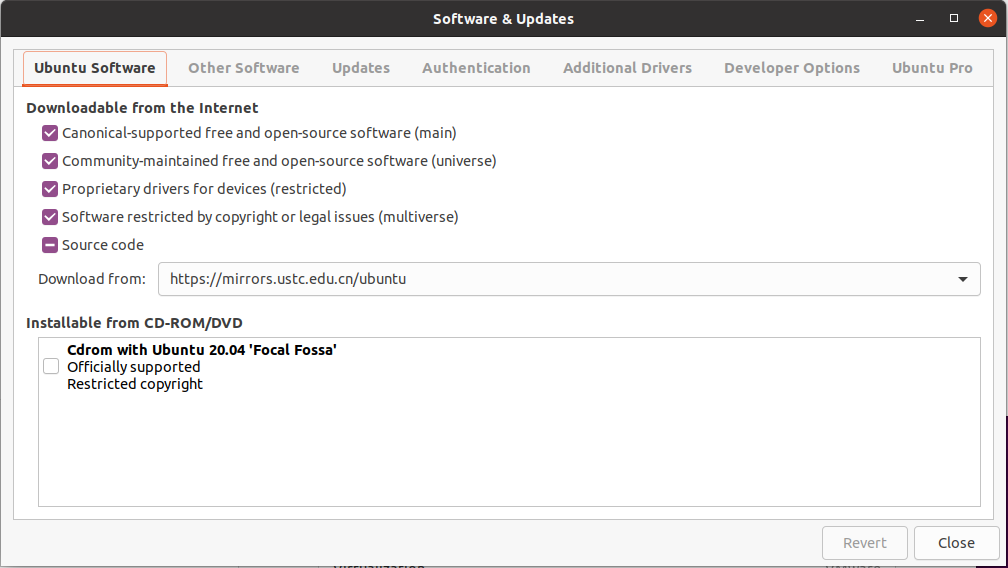
源配置
启用Ubuntu Universe存储库
sudo apt install software-properties-common
sudo add-apt-repository universe
添加带有apt的ros2 GPG秘钥
sudo apt update && sudo apt install curl -y
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
添加存储库到源列表
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(source /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
安装开发工具及ros工具
sudo apt update && sudo apt install -y \
python3-flake8-docstrings \
python3-pip \
python3-pytest-cov \
ros-dev-tools
安装软件包
python3 -m pip install -U \
flake8-blind-except \
flake8-builtins \
flake8-class-newline \
flake8-comprehensions \
flake8-deprecated \
flake8-import-order \
flake8-quotes \
"pytest>=5.3" \
pytest-repeat \
pytest-rerunfailures
获取源码
mkdir -p ~/ros2_humble/src
cd ~/ros2_humble
vcs import --input https://raw.githubusercontent.com/ros2/ros2/humble/ros2.repos src
// 上面的命令经常性报错,可以按下面的命令分步执行
wget https://raw.githubusercontent.com/ros2/ros2/humble/ros2.repos
vcs import src < ros2.repos
安装依赖
sudo apt upgrade
sudo rosdep init
rosdep update
rosdep install --from-paths src --ignore-src -y --skip-keys "fastcdr rti-connext-dds-6.0.1 urdfdom_headers"
源码编译
cd ~/ros2_humble/
colcon build --symlink-install
// 如果在编译过程中,出现packages failed、packages had stderr output,可以使用下的命令将其单独编译通过后在全部编译
colcon build --symlink-install --packages-select iceoryx_posh
配置环境
// ros2环境
echo " source ~/ros2_humble/install/setup.bash" >> ~/.bashrc
// 解决ros2命令不能自动补全的bug
echo "source /usr/share/colcon_argcomplete/hook/colcon-argcomplete.bash" >> ~/.bashrc
ros2测试
// 话题通信测试
ros2 run demo_nodes_cpp talker
ros2 run demo_nodes_py listener
// 小乌龟测试
ros2 run turtlesim turtlesim_node
ros2 run turtlesim turtle_teleop_key

 浙公网安备 33010602011771号
浙公网安备 33010602011771号