PyTorch消除训练瓶颈 提速技巧
【GiantPandaCV导读】训练大型的数据集的速度受很多因素影响,由于数据集比较大,每个优化带来的时间提升就不可小觑。硬件方面,CPU、内存大小、GPU、机械硬盘orSSD存储等都会有一定的影响。软件实现方面,PyTorch本身的DataLoader有时候会不够用,需要额外操作,比如使用混合精度、数据预读取、多线程读取数据、多卡并行优化等策略也会给整个模型优化带来非常巨大的作用。那什么时候需要采取这篇文章的策略呢?那就是明明GPU显存已经占满,但是显存的利用率很低。
本文将搜集到的资源进行汇总,由于目前笔者训练的GPU利用率已经很高,所以并没有实际实验,可以在参考文献中看一下其他作者做的实验。同时感谢作者群各位大佬的指点,yyds。
1. 硬件层面
CPU的话尽量看主频比较高的,缓存比较大的,核心数也是比较重要的参数。
显卡尽可能选现存比较大的,这样才能满足大batch训练,多卡当让更好。
内存要求64G,4根16G的内存条插满绝对够用了。
主板性能也要跟上,否则装再好的CPU也很难发挥出全部性能。
电源供电要充足,GPU运行的时候会对功率有一定要求,全力运行的时候如果电源供电不足对性能影响还是比较大的。
存储如果有条件,尽量使用SSD存放数据,SSD和机械硬盘的在训练的时候的读取速度不是一个量级。笔者试验过,相同的代码,将数据移动到SSD上要比在机械硬盘上快10倍。
操作系统尽量用Ubuntu就可以(实验室用)
如何实时查看Ubuntu下各个资源利用情况呢?
- GPU使用 watch -n 1 nvidia-smi 来动态监控
- IO情况,使用iostat命令来监控
- CPU情况,使用htop命令来监控
笔者对硬件了解很有限,欢迎补充,如有问题轻喷。
2. 如何测试训练过程的瓶颈
如果现在程序运行速度很慢,那应该如何判断瓶颈在哪里呢?PyTorch中提供了工具,非常方便的可以查看设计的代码在各个部分运行所消耗的时间。
可以使用PyTorch中bottleneck工具,具体使用方法如下:
python -m torch.utils.bottleneck /path/to/source/script.py [args]
详细内容可以看上面给出的链接。
当然,也可用cProfile这样的工具来测试瓶颈所在,先运行以下命令。
python -m cProfile -o 100_percent_gpu_utilization.prof train.py
这样就得到了文件100_percent_gpu_utilization.prof
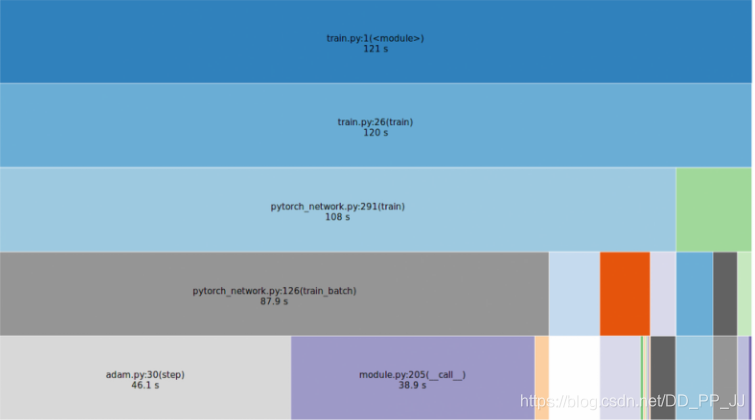
对其进行可视化(用到了snakeviz包,pip install snakeviz即可)
snakeviz 100_percent_gpu_utilization.prof
可视化的结果如下图所示:
其他方法:
# Profile CPU bottlenecks
python -m cProfile training_script.py --profiling
# Profile GPU bottlenecks
nvprof --print-gpu-trace python train_mnist.py
# Profile system calls bottlenecks
strace -fcT python training_script.py -e trace=open,close,read
还可以用以下代码分析:
def test_loss_profiling():
loss = nn.BCEWithLogitsLoss()
with torch.autograd.profiler.profile(use_cuda=True) as prof:
input = torch.randn((8, 1, 128, 128)).cuda()
input.requires_grad = True
target = torch.randint(1, (8, 1, 128, 128)).cuda().float()
for i in range(10):
l = loss(input, target)
l.backward()
print(prof.key_averages().table(sort_by="self_cpu_time_total"))
3. 图片解码
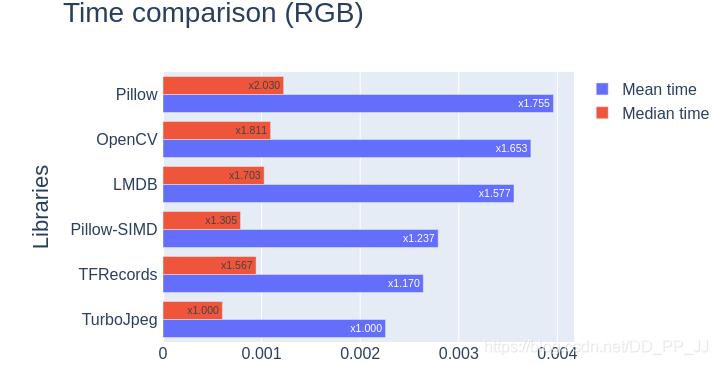
PyTorch中默认使用的是Pillow进行图像的解码,但是其效率要比Opencv差一些,如果图片全部是JPEG格式,可以考虑使用TurboJpeg库解码。具体速度对比如下图所示:
对于jpeg读取也可以考虑使用jpeg4py库(pip install jpeg4py),重写一个loader即可。
存bmp图也可以降低解码耗时,其他方案还有recordIO,hdf5,pth,n5,lmdb等格式
4. 数据增强加速
在PyTorch中,通常使用transformer做图片分类任务的数据增强,而其调用的是CPU做一些Crop、Flip、Jitter等操作。
如果你通过观察发现你的CPU利用率非常高,GPU利用率比较低,那说明瓶颈在于CPU预处理,可以使用Nvidia提供的DALI库在GPU端完成这部分数据增强操作。
文档也非常详细:
Dali文档:https://docs.nvidia.com/deeplearning/sdk/dali-developer-guide/index.html
当然,Dali提供的操作比较有限,仅仅实现了常用的方法,有些新的方法比如cutout需要自己搞。
具体实现可以参考这一篇:https://zhuanlan.zhihu.com/p/77633542
5. data Prefetch
Nvidia Apex中提供的解决方案
Apex提供的策略就是预读取下一次迭代需要的数据。
class data_prefetcher():
def __init__(self, loader):
self.loader = iter(loader)
self.stream = torch.cuda.Stream()
self.mean = torch.tensor([0.485 * 255, 0.456 * 255, 0.406 * 255]).cuda().view(1,3,1,1)
self.std = torch.tensor([0.229 * 255, 0.224 * 255, 0.225 * 255]).cuda().view(1,3,1,1)
# With Amp, it isn't necessary to manually convert data to half.
# if args.fp16:
# self.mean = self.mean.half()
# self.std = self.std.half()
self.preload()
def preload(self):
try:
self.next_input, self.next_target = next(self.loader)
except StopIteration:
self.next_input = None
self.next_target = None
return
with torch.cuda.stream(self.stream):
self.next_input = self.next_input.cuda(non_blocking=True)
self.next_target = self.next_target.cuda(non_blocking=True)
# With Amp, it isn't necessary to manually convert data to half.
# if args.fp16:
# self.next_input = self.next_input.half()
# else:
self.next_input = self.next_input.float()
self.next_input = self.next_input.sub_(self.mean).div_(self.std)
在训练函数中进行如下修改:
原先是:
training_data_loader = DataLoader(
dataset=train_dataset,
num_workers=opts.threads,
batch_size=opts.batchSize,
pin_memory=True,
shuffle=True,
)
for iteration, batch in enumerate(training_data_loader, 1):
# 训练代码
修改以后:
data, label = prefetcher.next()
iteration = 0
while data is not None:
iteration += 1
# 训练代码
data, label = prefetcher.next()
用prefetch库实现
安装:
pip install prefetch_generator
使用:
from torch.utils.data import DataLoader
from prefetch_generator import BackgroundGenerator
class DataLoaderX(DataLoader):
def __iter__(self):
return BackgroundGenerator(super().__iter__())
然后用DataLoaderX替换原本的DataLoader
cuda.Steam加速拷贝过程
实现:
class DataPrefetcher():
def __init__(self, loader, opt):
self.loader = iter(loader)
self.opt = opt
self.stream = torch.cuda.Stream()
# With Amp, it isn't necessary to manually convert data to half.
# if args.fp16:
# self.mean = self.mean.half()
# self.std = self.std.half()
self.preload()
def preload(self):
try:
self.batch = next(self.loader)
except StopIteration:
self.batch = None
return
with torch.cuda.stream(self.stream):
for k in self.batch:
if k != 'meta':
self.batch[k] = self.batch[k].to(device=self.opt.device, non_blocking=True)
# With Amp, it isn't necessary to manually convert data to half.
# if args.fp16:
# self.next_input = self.next_input.half()
# else:
# self.next_input = self.next_input.float()
def next(self):
torch.cuda.current_stream().wait_stream(self.stream)
batch = self.batch
self.preload()
return batch
调用:
# ----改造前----
for iter_id, batch in enumerate(data_loader):
if iter_id >= num_iters:
break
for k in batch:
if k != 'meta':
batch[k] = batch[k].to(device=opt.device, non_blocking=True)
run_step()
# ----改造后----
prefetcher = DataPrefetcher(data_loader, opt)
batch = prefetcher.next()
iter_id = 0
while batch is not None:
iter_id += 1
if iter_id >= num_iters:
break
run_step()
batch = prefetcher.next()
国外大佬实现
数据加载部分
import threading
import numpy as np
import cv2
import random
class threadsafe_iter:
"""Takes an iterator/generator and makes it thread-safe by
serializing call to the `next` method of given iterator/generator.
"""
def __init__(self, it):
self.it = it
self.lock = threading.Lock()
def __iter__(self):
return self
def next(self):
with self.lock:
return self.it.next()
def get_path_i(paths_count):
"""Cyclic generator of paths indice
"""
current_path_id = 0
while True:
yield current_path_id
current_path_id = (current_path_id + 1) % paths_count
class InputGen:
def __init__(self, paths, batch_size):
self.paths = paths
self.index = 0
self.batch_size = batch_size
self.init_count = 0
self.lock = threading.Lock() #mutex for input path
self.yield_lock = threading.Lock() #mutex for generator yielding of batch
self.path_id_generator = threadsafe_iter(get_path_i(len(self.paths)))
self.images = []
self.labels = []
def get_samples_count(self):
""" Returns the total number of images needed to train an epoch """
return len(self.paths)
def get_batches_count(self):
""" Returns the total number of batches needed to train an epoch """
return int(self.get_samples_count() / self.batch_size)
def pre_process_input(self, im,lb):
""" Do your pre-processing here
Need to be thread-safe function"""
return im, lb
def next(self):
return self.__iter__()
def __iter__(self):
while True:
#In the start of each epoch we shuffle the data paths
with self.lock:
if (self.init_count == 0):
random.shuffle(self.paths)
self.images, self.labels, self.batch_paths = [], [], []
self.init_count = 1
#Iterates through the input paths in a thread-safe manner
for path_id in self.path_id_generator:
img, label = self.paths[path_id]
img = cv2.imread(img, 1)
label_img = cv2.imread(label,1)
img, label = self.pre_process_input(img,label_img)
#Concurrent access by multiple threads to the lists below
with self.yield_lock:
if (len(self.images)) < self.batch_size:
self.images.append(img)
self.labels.append(label)
if len(self.images) % self.batch_size == 0:
yield np.float32(self.images), np.float32(self.labels)
self.images, self.labels = [], []
#At the end of an epoch we re-init data-structures
with self.lock:
self.init_count = 0
def __call__(self):
return self.__iter__()
使用方法:
class thread_killer(object):
"""Boolean object for signaling a worker thread to terminate
"""
def __init__(self):
self.to_kill = False
def __call__(self):
return self.to_kill
def set_tokill(self,tokill):
self.to_kill = tokill
def threaded_batches_feeder(tokill, batches_queue, dataset_generator):
"""Threaded worker for pre-processing input data.
tokill is a thread_killer object that indicates whether a thread should be terminated
dataset_generator is the training/validation dataset generator
batches_queue is a limited size thread-safe Queue instance.
"""
while tokill() == False:
for batch, (batch_images, batch_labels) \
in enumerate(dataset_generator):
#We fill the queue with new fetched batch until we reach the max size.
batches_queue.put((batch, (batch_images, batch_labels))\
, block=True)
if tokill() == True:
return
def threaded_cuda_batches(tokill,cuda_batches_queue,batches_queue):
"""Thread worker for transferring pytorch tensors into
GPU. batches_queue is the queue that fetches numpy cpu tensors.
cuda_batches_queue receives numpy cpu tensors and transfers them to GPU space.
"""
while tokill() == False:
batch, (batch_images, batch_labels) = batches_queue.get(block=True)
batch_images_np = np.transpose(batch_images, (0, 3, 1, 2))
batch_images = torch.from_numpy(batch_images_np)
batch_labels = torch.from_numpy(batch_labels)
batch_images = Variable(batch_images).cuda()
batch_labels = Variable(batch_labels).cuda()
cuda_batches_queue.put((batch, (batch_images, batch_labels)), block=True)
if tokill() == True:
return
if __name__ =='__main__':
import time
import Thread
import sys
from Queue import Empty,Full,Queue
num_epoches=1000
#model is some Pytorch CNN model
model.cuda()
model.train()
batches_per_epoch = 64
#Training set list suppose to be a list of full-paths for all
#the training images.
training_set_list = None
#Our train batches queue can hold at max 12 batches at any given time.
#Once the queue is filled the queue is locked.
train_batches_queue = Queue(maxsize=12)
#Our numpy batches cuda transferer queue.
#Once the queue is filled the queue is locked
#We set maxsize to 3 due to GPU memory size limitations
cuda_batches_queue = Queue(maxsize=3)
training_set_generator = InputGen(training_set_list,batches_per_epoch)
train_thread_killer = thread_killer()
train_thread_killer.set_tokill(False)
preprocess_workers = 4
#We launch 4 threads to do load && pre-process the input images
for _ in range(preprocess_workers):
t = Thread(target=threaded_batches_feeder, \
args=(train_thread_killer, train_batches_queue, training_set_generator))
t.start()
cuda_transfers_thread_killer = thread_killer()
cuda_transfers_thread_killer.set_tokill(False)
cudathread = Thread(target=threaded_cuda_batches, \
args=(cuda_transfers_thread_killer, cuda_batches_queue, train_batches_queue))
cudathread.start()
#We let queue to get filled before we start the training
time.sleep(8)
for epoch in range(num_epoches):
for batch in range(batches_per_epoch):
#We fetch a GPU batch in 0's due to the queue mechanism
_, (batch_images, batch_labels) = cuda_batches_queue.get(block=True)
#train batch is the method for your training step.
#no need to pin_memory due to diminished cuda transfers using queues.
loss, accuracy = train_batch(batch_images, batch_labels)
train_thread_killer.set_tokill(True)
cuda_transfers_thread_killer.set_tokill(True)
for _ in range(preprocess_workers):
try:
#Enforcing thread shutdown
train_batches_queue.get(block=True,timeout=1)
cuda_batches_queue.get(block=True,timeout=1)
except Empty:
pass
print "Training done"
6. 多GPU并行处理
PyTorch中提供了分布式训练API, nn.DistributedDataParallel, 推理的时候也可以使用nn.DataParallel或者nn.DistributedDataParallel。
推荐一个库,里面实现了多种分布式训练的demo: https://github.com/tczhangzhi/pytorch-distributed 其中包括:
- nn.DataParallel
- torch.distributed
- torch.multiprocessing
- apex再加速
- horovod实现
- slurm GPU集群分布式
7. 混合精度训练
mixed precision yyds,之前分享过mixed precision论文阅读,实现起来非常简单。在PyTorch中,可以使用Apex库。如果用的是最新版本的PyTorch,其自身已经支持了混合精度训练,非常nice。
简单来说,混合精度能够让你在精度不掉的情况下,batch提升一倍。其原理就是将原先float point32精度的数据变为float point16的数据,不管是数据传输还是训练过程,都极大提升了训练速度,炼丹必备。
8. 其他细节
batch_images = batch_images.pin_memory()
Batch_labels = Variable(batch_labels).cuda(non_blocking=True)
-
PyTorch的DataLoader有一个参数pin_memory,使用固定内存,并使用non_blocking=True来并行处理数据传输。
-
torch.backends.cudnn.benchmark=True
-
及时释放掉不需要的显存、内存。
-
如果数据集比较小,直接将数据复制到内存中,从内存中读取可以极大加快数据读取的速度。
-
调整workers数量,过少的线程读取数据会导致速度非常慢,过多线程读取数据可能会由于阻塞也导致速度非常慢。所以需要根据自己机器的情况,尝试不同数量的workers,选择最合适的数量。一般设置为 cpu 核心数或gpu数量
-
编码的时候要注意尽可能减少CPU和GPU之间的数据传输,使用类似numpy的编码方式,通过并行的方式来处理,可以提高性能。
-
使用
TFRecord或者LMDB等,减少小文件的读写
参考文献
【1】https://zhuanlan.zhihu.com/p/66145913
【2】https://pytorch.org/docs/stable/bottleneck.html
【3】https://blog.csdn.net/dancer__sky/article/details/78631577
【4】https://sagivtech.com/2017/09/19/optimizing-pytorch-training-code/
【5】https://zhuanlan.zhihu.com/p/77633542
【6】https://github.com/NVIDIA/DALI
【7】https://zhuanlan.zhihu.com/p/147723652
【8】https://www.zhihu.com/question/356829360/answer/907832358

 浙公网安备 33010602011771号
浙公网安备 33010602011771号