【从零开始学习YOLOv3】5. 网络模型的构建
前言:之前几篇讲了cfg文件的理解、数据集的构建、数据加载机制和超参数进化机制,本文将讲解YOLOv3如何从cfg文件构造模型。本文涉及到一个比较有用的部分就是bias的设置,可以提升mAP、F1、P、R等指标,还能让训练过程更加平滑。
1. cfg文件
在YOLOv3中,修改网络结构很容易,只需要修改cfg文件即可。目前,cfg文件支持convolutional, maxpool, unsample, route, shortcut, yolo这几个层。
而且作者也提供了多个cfg文件来进行网络构建,比如:yolov3.cfg、yolov3-tiny.cfg、yolov3-spp.cfg、csresnext50-panet-spp.cfg文件(提供的yolov3-spp-pan-scale.cfg文件,在代码级别还没有提供支持)。
如果想要添加自定义的模块也很方便,比如说注意力机制模块、空洞卷积等,都可以简单地得到添加或者修改。
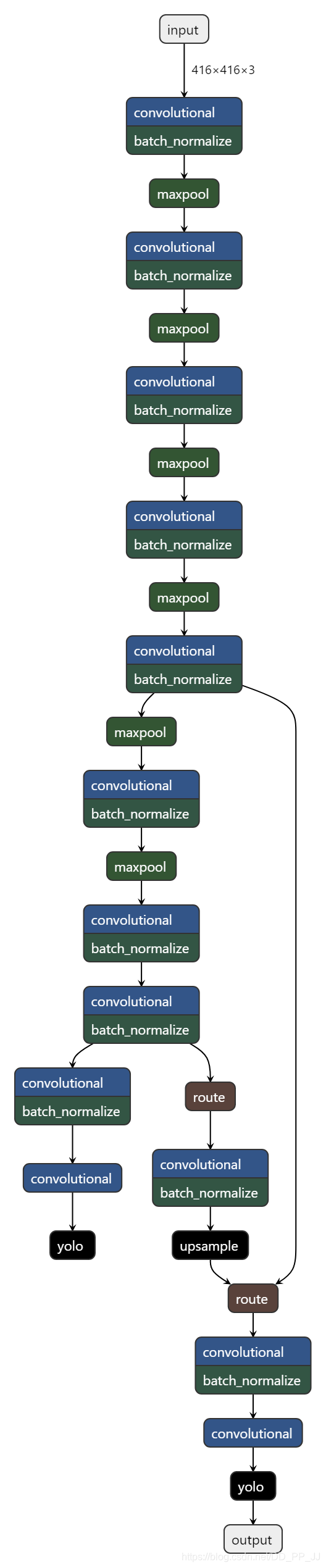
为了更加方便的理解cfg文件网络是如何构建的,在这里推荐一个Github上的网络结构可视化软件:Netron,下图是可视化yolov3-tiny的结果:
2. 网络模型构建
从train.py文件入手,其中涉及的网络构建的代码为:
# Initialize model
model = Darknet(cfg, arc=opt.arc).to(device)
然后沿着Darknet实现进行讲解:
class Darknet(nn.Module):
# YOLOv3 object detection model
def __init__(self, cfg, img_size=(416, 416), arc='default'):
super(Darknet, self).__init__()
self.module_defs = parse_model_cfg(cfg)
self.module_list, self.routs = create_modules(self.module_defs, img_size, arc)
self.yolo_layers = get_yolo_layers(self)
# Darknet Header
self.version = np.array([0, 2, 5], dtype=np.int32)
# (int32) version info: major, minor, revision
self.seen = np.array([0], dtype=np.int64)
# (int64) number of images seen during training
以上文件中,比较关键的就是成员函变量module_defs、module_list、routs、yolo_layers四个成员函数,先对这几个参数的意义进行解释:
2.1 module_defs
调用了parse_model_cfg函数,得到了module_defs对象。实际上该函数是通过解析cfg文件,得到一个list,list中包含多个字典,每个字典保存的内容就是一个模块内容,比如说:
[convolutional]
batch_normalize=1
filters=128
size=3
stride=2
pad=1
activation=leaky
函数代码如下:
def parse_model_cfg(path):
# path参数为: cfg/yolov3-tiny.cfg
if not path.endswith('.cfg'):
path += '.cfg'
if not os.path.exists(path) and os.path.exists('cfg' + os.sep + path):
path = 'cfg' + os.sep + path
with open(path, 'r') as f:
lines = f.read().split('\n')
# 去除以#开头的,属于注释部分的内容
lines = [x for x in lines if x and not x.startswith('#')]
lines = [x.rstrip().lstrip() for x in lines]
mdefs = [] # 模块的定义
for line in lines:
if line.startswith('['): # 标志着一个模块的开始
'''
比如:
[shortcut]
from=-3
activation=linear
'''
mdefs.append({})
mdefs[-1]['type'] = line[1:-1].rstrip()
if mdefs[-1]['type'] == 'convolutional':
mdefs[-1]['batch_normalize'] = 0
# pre-populate with zeros (may be overwritten later)
else:
# 将键和键值放入字典
key, val = line.split("=")
key = key.rstrip()
if 'anchors' in key:
mdefs[-1][key] = np.array([float(x) for x in val.split(',')]).reshape((-1, 2)) # np anchors
else:
mdefs[-1][key] = val.strip()
# 支持的参数类型
supported = ['type', 'batch_normalize', 'filters', 'size',\
'stride', 'pad', 'activation', 'layers', 'groups',\
'from', 'mask', 'anchors', 'classes', 'num', 'jitter', \
'ignore_thresh', 'truth_thresh', 'random',\
'stride_x', 'stride_y']
# 判断所有参数中是否有不符合要求的key
f = []
for x in mdefs[1:]:
[f.append(k) for k in x if k not in f]
u = [x for x in f if x not in supported] # unsupported fields
assert not any(u), "Unsupported fields %s in %s. See https://github.com/ultralytics/yolov3/issues/631" % (u, path)
return mdefs
返回的内容通过debug模式进行查看:
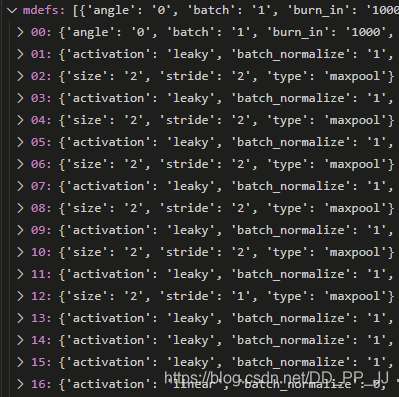
其中需要关注的就是anchor的组织:
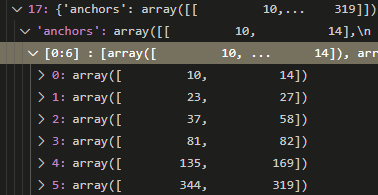
可以看出,anchor是按照每两个一对进行组织的,与我们的理解一致。
2.2 module_list&routs
这个部分是本文的核心,也是理解模型构建的关键。
在pytorch中,构建模型常见的有通过Sequential或者ModuleList进行构建。
通过Sequential构建
model=nn.Sequential()
model.add_module('conv',nn.Conv2d(3,3,3))
model.add_module('batchnorm',nn.BatchNorm2d(3))
model.add_module('activation_layer',nn.ReLU())
或者
model=nn.Sequential(
nn.Conv2d(3,3,3),
nn.BatchNorm2d(3),
nn.ReLU()
)
或者
from collections import OrderedDict
model=nn.Sequential(OrderedDict([
('conv',nn.Conv2d(3,3,3)),
('batchnorm',nn.BatchNorm2d(3)),
('activation_layer',nn.ReLU())
]))
通过sequential构建的模块内部实现了forward函数,可以直接传入参数,进行调用。
通过ModuleList构建
model=nn.ModuleList([nn.Linear(3,4),
nn.ReLU(),
nn.Linear(4,2)])
ModuleList类似list,内部没有实现forward函数,使用的时候需要构建forward函数,构建自己模型常用ModuleList函数建立子模型,建立forward函数实现前向传播。
在YOLOv3中,灵活地结合了两种使用方式,通过解析以上得到的module_defs,进行构建一个ModuleList,然后再通过构建forward函数进行前向传播即可。
具体代码如下:
def create_modules(module_defs, img_size, arc):
# 通过module_defs进行构建模型
hyperparams = module_defs.pop(0)
output_filters = [int(hyperparams['channels'])]
module_list = nn.ModuleList()
routs = [] # 存储了所有的层,在route、shortcut会使用到。
yolo_index = -1
for i, mdef in enumerate(module_defs):
modules = nn.Sequential()
'''
通过type字样不同的类型,来进行模型构建
'''
if mdef['type'] == 'convolutional':
bn = int(mdef['batch_normalize'])
filters = int(mdef['filters'])
size = int(mdef['size'])
stride = int(mdef['stride']) if 'stride' in mdef else (int(
mdef['stride_y']), int(mdef['stride_x']))
pad = (size - 1) // 2 if int(mdef['pad']) else 0
modules.add_module(
'Conv2d',
nn.Conv2d(
in_channels=output_filters[-1],
out_channels=filters,
kernel_size=size,
stride=stride,
padding=pad,
groups=int(mdef['groups']) if 'groups' in mdef else 1,
bias=not bn))
if bn:
modules.add_module('BatchNorm2d',
nn.BatchNorm2d(filters, momentum=0.1))
if mdef['activation'] == 'leaky': # TODO: activation study https://github.com/ultralytics/yolov3/issues/441
modules.add_module('activation', nn.LeakyReLU(0.1,
inplace=True))
elif mdef['activation'] == 'swish':
modules.add_module('activation', Swish())
# 在此处可以添加新的激活函数
elif mdef['type'] == 'maxpool':
# 最大池化操作
size = int(mdef['size'])
stride = int(mdef['stride'])
maxpool = nn.MaxPool2d(kernel_size=size,
stride=stride,
padding=int((size - 1) // 2))
if size == 2 and stride == 1: # yolov3-tiny
modules.add_module('ZeroPad2d', nn.ZeroPad2d((0, 1, 0, 1)))
modules.add_module('MaxPool2d', maxpool)
else:
modules = maxpool
elif mdef['type'] == 'upsample':
# 通过近邻插值完成上采样
modules = nn.Upsample(scale_factor=int(mdef['stride']),
mode='nearest')
elif mdef['type'] == 'route':
# nn.Sequential() placeholder for 'route' layer
layers = [int(x) for x in mdef['layers'].split(',')]
filters = sum(
[output_filters[i + 1 if i > 0 else i] for i in layers])
# extend表示添加一系列对象
routs.extend([l if l > 0 else l + i for l in layers])
elif mdef['type'] == 'shortcut':
# nn.Sequential() placeholder for 'shortcut' layer
filters = output_filters[int(mdef['from'])]
layer = int(mdef['from'])
routs.extend([i + layer if layer < 0 else layer])
elif mdef['type'] == 'yolo':
yolo_index += 1
mask = [int(x) for x in mdef['mask'].split(',')] # anchor mask
modules = YOLOLayer(
anchors=mdef['anchors'][mask], # anchor list
nc=int(mdef['classes']), # number of classes
img_size=img_size, # (416, 416)
yolo_index=yolo_index, # 0, 1 or 2
arc=arc) # yolo architecture
# 这是在focal loss文章中提到的为卷积层添加bias
# 主要用于解决样本不平衡问题
# (论文地址 https://arxiv.org/pdf/1708.02002.pdf section 3.3)
# 具体讲解见下方
try:
if arc == 'defaultpw' or arc == 'Fdefaultpw':
# default with positive weights
b = [-5.0, -5.0] # obj, cls
elif arc == 'default':
# default no pw (40 cls, 80 obj)
b = [-5.0, -5.0]
elif arc == 'uBCE':
# unified BCE (80 classes)
b = [0, -9.0]
elif arc == 'uCE':
# unified CE (1 background + 80 classes)
b = [10, -0.1]
elif arc == 'Fdefault':
# Focal default no pw (28 cls, 21 obj, no pw)
b = [-2.1, -1.8]
elif arc == 'uFBCE' or arc == 'uFBCEpw':
# unified FocalBCE (5120 obj, 80 classes)
b = [0, -6.5]
elif arc == 'uFCE':
# unified FocalCE (64 cls, 1 background + 80 classes)
b = [7.7, -1.1]
bias = module_list[-1][0].bias.view(len(mask), -1)
# 255 to 3x85
bias[:, 4] += b[0] - bias[:, 4].mean() # obj
bias[:, 5:] += b[1] - bias[:, 5:].mean() # cls
# 将新的偏移量赋值回模型中
module_list[-1][0].bias = torch.nn.Parameter(bias.view(-1))
except:
print('WARNING: smart bias initialization failure.')
else:
print('Warning: Unrecognized Layer Type: ' + mdef['type'])
# 将module内容保存在module_list中。
module_list.append(modules)
# 保存所有的filter个数
output_filters.append(filters)
return module_list, routs
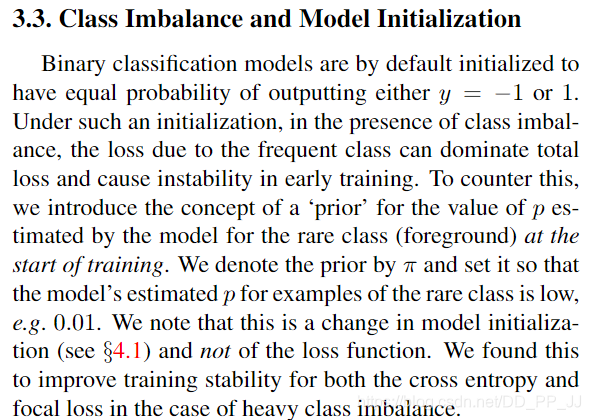
bias部分讲解
其中在YOLO Layer部分涉及到一个初始化的trick,来自Focal Loss中关于模型初始化的讨论,具体内容请阅读论文,https://arxiv.org/pdf/1708.02002.pdf 的第3.3节。
这里涉及到一个非常insight的点,笔者与BBuf讨论了很长时间,才理解这样做的原因。
我们在第一篇中介绍了,YOLO层前一个卷积的filter个数计算公式如下:
5代表x,y,w,h, score,score代表该格子中是否存在目标,3代表这个格子中会分配3个anchor进行匹配。在YOLOLayer中的forward函数中,有以下代码,需要通过sigmoid激活函数:
if 'default' in self.arc: # seperate obj and cls
torch.sigmoid_(io[..., 4])
elif 'BCE' in self.arc: # unified BCE (80 classes)
torch.sigmoid_(io[..., 5:])
io[..., 4] = 1
elif 'CE' in self.arc: # unified CE (1 background + 80 classes)
io[..., 4:] = F.softmax(io[..., 4:], dim=4)
io[..., 4] = 1
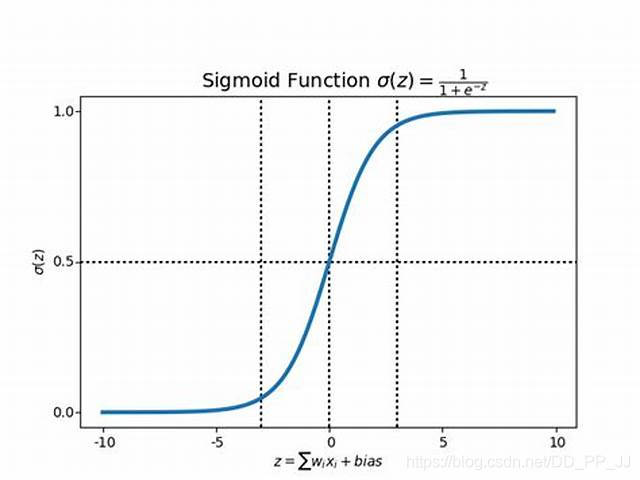
可以观察到,Sigmoid梯度是有限的,大致在[-10,10]之间。
在pytorch中的卷积层默认的初始化是以0为中心点的正态分布,这样进行的初始化会导致很多gird中大约一半得到了激活,在计算loss的时候就会计算上所有的激活的点对应的坐标信息,这样计算loss就会变得很大。
根据这个现象,作者选择在YOLOLayer的前一个卷积层添加bias,来避免这种情况,实际操作就是在原有的bias上减去5,这样通过卷积得到的数值就不会被激活,可以防止在初始阶段的第一个batch中就进行过拟合。通过以上操作,能够让所有的神经元在前几个batch中输出空的检测。
经过作者的实验,通过使用bias的trick,可以提升mAP、F1、P、R等指标,还能让训练过程更加平滑。
2.3 yolo_layers
代码如下:
def get_yolo_layers(model):
return [i for i, x in enumerate(model.module_defs) if x['type'] == 'yolo']
# [82, 94, 106] for yolov3
yolo layer的获取是通过解析module_defs这个存储cfg文件中的信息的变量得到的。以yolov3.cfg为例,最终返回的是yolo层在整个module的序号。比如:第83,94,106个层是YOLO层。
3. forward函数
在YOLO中,如果能理解前向传播的过程,那整个网络的构建也就很清楚明了了。
def forward(self, x, var=None):
img_size = x.shape[-2:]
layer_outputs = []
output = []
for i, (mdef,
module) in enumerate(zip(self.module_defs, self.module_list)):
mtype = mdef['type']
if mtype in ['convolutional', 'upsample', 'maxpool']:
# 卷积层,上采样,池化层只需要经过即可
x = module(x)
elif mtype == 'route':
# route操作就是将几个层的内容拼接起来,具体可以看cfg文件解析
layers = [int(x) for x in mdef['layers'].split(',')]
if len(layers) == 1:
x = layer_outputs[layers[0]]
else:
try:
x = torch.cat([layer_outputs[i] for i in layers], 1)
except:
# apply stride 2 for darknet reorg layer
layer_outputs[layers[1]] = F.interpolate(
layer_outputs[layers[1]], scale_factor=[0.5, 0.5])
x = torch.cat([layer_outputs[i] for i in layers], 1)
elif mtype == 'shortcut':
x = x + layer_outputs[int(mdef['from'])]
elif mtype == 'yolo':
output.append(module(x, img_size))
#记录route对应的层
layer_outputs.append(x if i in self.routs else [])
if self.training:
# 如果训练,直接输出YOLO要求的Tensor
# 3*(class+5)
return output
elif ONNX_EXPORT:# 这个是对应的onnx导出的内容
x = [torch.cat(x, 0) for x in zip(*output)]
return x[0], torch.cat(x[1:3], 1) # scores, boxes: 3780x80, 3780x4
else:
# 对应测试阶段
io, p = list(zip(*output)) # inference output, training output
return torch.cat(io, 1), p
forward的过程也比较简单,通过得到的module_defs和module_list变量,通过for循环将整个module_list中的内容进行一遍串联,需要得到的最终结果是YOLO层的输出。(ps:下一篇文章再进行YOLOLayer的代码解析)
参考资料
sequential用法https://blog.csdn.net/happyday_d/article/details/85629119

 浙公网安备 33010602011771号
浙公网安备 33010602011771号