【从零开始学习YOLOv3】6. 模型构建中的YOLOLayer
前言:上次讲了YOLOv3中的模型构建,从头到尾理了一遍从cfg读取到模型整个构建的过程。其中模型构建中最重要的YOLOLayer还没有梳理,本文将从代码的角度理解YOLOLayer的构建与实现。
1. Grid创建
YOLOv3是一个单阶段的目标检测器,将目标划分为不同的grid,每个grid分配3个anchor作为先验框来进行匹配。首先读一下代码中关于grid创建的部分。
首先了解一下pytorch中的API:torch.mershgrid
举一个简单的例子就比较清楚了:
Python 3.7.3 (default, Apr 24 2019, 15:29:51) [MSC v.1915 64 bit (AMD64)] :: Anaconda, Inc. on win32
Type "help", "copyright", "credits" or "license" for more information.
>>> import torch
>>> a = torch.arange(3)
>>> b = torch.arange(5)
>>> x,y = torch.meshgrid(a,b)
>>> a
tensor([0, 1, 2])
>>> b
tensor([0, 1, 2, 3, 4])
>>> x
tensor([[0, 0, 0, 0, 0],
[1, 1, 1, 1, 1],
[2, 2, 2, 2, 2]])
>>> y
tensor([[0, 1, 2, 3, 4],
[0, 1, 2, 3, 4],
[0, 1, 2, 3, 4]])
>>>
单纯看输入输出,可能不是很明白,列举一个例子:
>>> for i in range(3):
... for j in range(4):
... print("(", x[i,j], "," ,y[i,j],")")
...
( tensor(0) , tensor(0) )
( tensor(0) , tensor(1) )
( tensor(0) , tensor(2) )
( tensor(0) , tensor(3) )
( tensor(1) , tensor(0) )
( tensor(1) , tensor(1) )
( tensor(1) , tensor(2) )
( tensor(1) , tensor(3) )
( tensor(2) , tensor(0) )
( tensor(2) , tensor(1) )
( tensor(2) , tensor(2) )
( tensor(2) , tensor(3) )
>>> torch.stack((x,y),2)
tensor([[[0, 0],
[0, 1],
[0, 2],
[0, 3],
[0, 4]],
[[1, 0],
[1, 1],
[1, 2],
[1, 3],
[1, 4]],
[[2, 0],
[2, 1],
[2, 2],
[2, 3],
[2, 4]]])
>>>
现在就比较清楚了,划分了3×4的网格,通过遍历得到的x和y就能遍历全部格子。
下面是yolov3中提供的代码(需要注意的是这是针对某一层YOLOLayer,而不是所有的YOLOLayer):
def create_grids(self,
img_size=416,
ng=(13, 13),
device='cpu',
type=torch.float32):
nx, ny = ng # 网格尺寸
self.img_size = max(img_size)
#下采样倍数为32
self.stride = self.img_size / max(ng)
# 划分网格,构建相对左上角的偏移量
yv, xv = torch.meshgrid([torch.arange(ny), torch.arange(nx)])
# 通过以上例子很容易理解
self.grid_xy = torch.stack((xv, yv), 2).to(device).type(type).view(
(1, 1, ny, nx, 2))
# 处理anchor,将其除以下采样倍数
self.anchor_vec = self.anchors.to(device) / self.stride
self.anchor_wh = self.anchor_vec.view(1, self.na, 1, 1,
2).to(device).type(type)
self.ng = torch.Tensor(ng).to(device)
self.nx = nx
self.ny = ny
2. YOLOLayer
在之前的文章中讲过,YOLO层前一层卷积层的filter个数具有特殊的要求,计算方法为:
如下图所示:
训练过程:
YOLOLayer的作用就是对上一个卷积层得到的张量进行处理,具体可以看training过程涉及的代码(暂时不关心ONNX部分的代码):
class YOLOLayer(nn.Module):
def __init__(self, anchors, nc, img_size, yolo_index, arc):
super(YOLOLayer, self).__init__()
self.anchors = torch.Tensor(anchors)
self.na = len(anchors) # 该YOLOLayer分配给每个grid的anchor的个数
self.nc = nc # 类别个数
self.no = nc + 5 # 每个格子对应输出的维度 class + 5 中5代表x,y,w,h,conf
self.nx = 0 # 初始化x方向上的格子数量
self.ny = 0 # 初始化y方向上的格子数量
self.arc = arc
if ONNX_EXPORT: # grids must be computed in __init__
stride = [32, 16, 8][yolo_index] # stride of this layer
nx = int(img_size[1] / stride) # number x grid points
ny = int(img_size[0] / stride) # number y grid points
create_grids(self, img_size, (nx, ny))
def forward(self, p, img_size, var=None):
'''
onnx代表开放式神经网络交换
pytorch中的模型都可以导出或转换为标准ONNX格式
在模型采用ONNX格式后,即可在各种平台和设备上运行
在这里ONNX代表规范化的推理过程
'''
if ONNX_EXPORT:
bs = 1 # batch size
else:
bs, _, ny, nx = p.shape # bs, 255, 13, 13
if (self.nx, self.ny) != (nx, ny):
create_grids(self, img_size, (nx, ny), p.device, p.dtype)
# p.view(bs, 255, 13, 13) -- > (bs, 3, 13, 13, 85)
# (bs, anchors, grid, grid, classes + xywh)
p = p.view(bs, self.na, self.no, self.ny,
self.nx).permute(0, 1, 3, 4, 2).contiguous()
if self.training:
return p
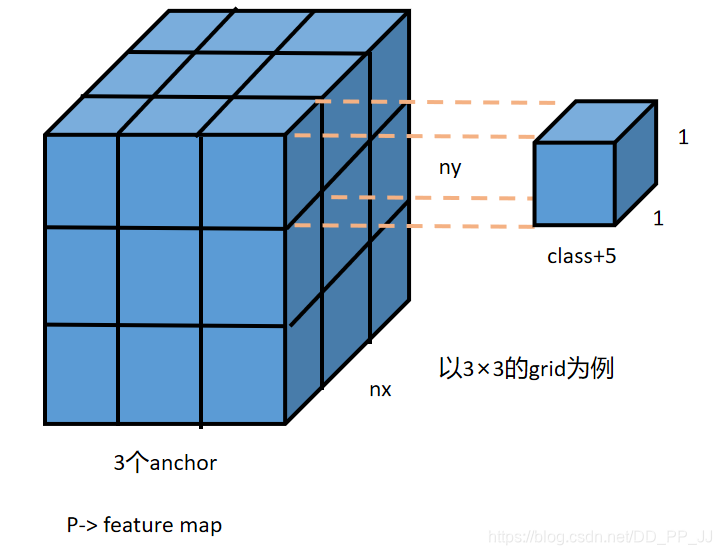
在理解以上代码的时候,需要理解每一个通道所代表的意义,原先的P是由上一层卷积得到的feature map, 形状为(以80个类别、输入416、下采样32倍为例):【batch size, anchor×(80+5), 13, 13】,在训练的过程中,将feature map通过张量操作转化的形状为:【batch size, anchor, 13, 13, 85】。
测试过程:
# p的形状目前为:【bs, anchor_num, gridx,gridy,xywhc+class】
else: # 测试推理过程
# s = 1.5 # scale_xy (pxy = pxy * s - (s - 1) / 2)
io = p.clone() # 测试过程输出就是io
io[..., :2] = torch.sigmoid(io[..., :2]) + self.grid_xy # xy
# grid_xy是左上角再加上偏移量io[...:2]代表xy偏移
io[..., 2:4] = torch.exp(
io[..., 2:4]) * self.anchor_wh # wh yolo method
# io[..., 2:4] = ((torch.sigmoid(io[..., 2:4]) * 2) ** 3) * self.anchor_wh
# wh power method
io[..., :4] *= self.stride
if 'default' in self.arc: # seperate obj and cls
torch.sigmoid_(io[..., 4])
elif 'BCE' in self.arc: # unified BCE (80 classes)
torch.sigmoid_(io[..., 5:])
io[..., 4] = 1
elif 'CE' in self.arc: # unified CE (1 background + 80 classes)
io[..., 4:] = F.softmax(io[..., 4:], dim=4)
io[..., 4] = 1
if self.nc == 1:
io[..., 5] = 1
# single-class model https://github.com/ultralytics/yolov3/issues/235
# reshape from [1, 3, 13, 13, 85] to [1, 507, 85]
return io.view(bs, -1, self.no), p
理解以上内容是需要对应以下公式:
xy部分:
\(c_x, c_y\)代表的是格子的左上角坐标;\(t_x, t_y\)代表的是网络预测的结果;\(\sigma\)代表sigmoid激活函数。对应代码理解:
io[..., :2] = torch.sigmoid(io[..., :2]) + self.grid_xy # xy
# grid_xy是左上角再加上偏移量io[...:2]代表xy偏移
wh部分:
\(p_w, p_h\)代表的是anchor先验框在feature map上对应的大小。\(t_w, t_h\)代表的是网络学习得到的缩放系数。对应代码理解:
# wh yolo method
io[..., 2:4] = torch.exp(io[..., 2:4]) * self.anchor_wh
class部分:
在类别部分,提供了几种方法,根据arc参数来进行不同模式的选择。以CE(crossEntropy)为例:
#io: (bs, anchors, grid, grid, xywh+classes)
io[..., 4:] = F.softmax(io[..., 4:], dim=4)# 使用softmax
io[..., 4] = 1
3. 参考资料
pytorch的官方API

 浙公网安备 33010602011771号
浙公网安备 33010602011771号