浅析数据结构-图的遍历
上一篇了解图的基本概念,包括图的分类、术语以及存储结构。本篇就是应用图的存储结构,将图进行数据抽象化,应用遍历方法,对数据进行遍历。由于图复杂的数据结构,一定保证图中所有顶点被遍历。如果只访问图的顶点而不关注边的信息,那么图的遍历十分简单,使用一个foreach语句遍历存放顶点信息的数组即可。但是,如果为了实现特定算法,就必须要根据边的信息按照一定的顺序进行遍历。图的遍历算法是求解图的连通性问题、拓扑排序和求解关键路径等算法的基础。
一、图的遍历

图的数据结构相对树复杂,图的任一顶点都可能和其余顶点相邻接,所以在访问了某顶点之后,可能顺着某条边又访问到了已访问过的顶点。在图遍历过程中,防止同一个顶点被访问多次,必须记下每个访问过的顶点。给顶点附加一个访问标志isVisited,其初值为false,一旦某个顶点被访问,则将其isVisited标志设为true。
图顶点数据结构
在上面代码图顶点的数据结构定义中,增加了一个bool类型的成员isVisited,用于在遍历时判断是否已经访问过了该顶点。一般在进行遍历操作时,会首先将所有顶点的isVisited属性置为false,访问后设置为true。
图的遍历方法主要有两种:一种是深度优先搜索遍历(Depth-First Search,DFS),另一种是广度优先搜索遍历(Breadth-First Search,BFS)。
二、深度优先搜索遍历
原理
图的深度优先遍历类似于二叉树的深度优先遍历,其基本思想是:从图中某个顶点v出发,访问此顶点,然后从v的未被访问的邻接点出发深度优先遍历图,直至图中所有和v有路径相通的顶点都被访问到。显然,这是一个递归的搜索过程。

在上图中我们坚持沿着右手边走,如果碰见标记的跳过,选择另一条。到最后时再返回遍历确认是否都有标记。其实就是树的前序遍历。以上图为例,假定A是出发点,首先访问A。这时两个邻接点B、F均未被访问,右手边为B,访问B之后,按照右手原则遍历到C,相同原理A→B→C→D→E→F,在F上向右为A,因为A遍历过,则访问G。最后到H,再走发现到D,E,两者都访问了。关键此时,还有没访问到的,按照原路返回,返回到G,一条条返回,最后得到的访问序列为A→B→C→D→E→F→G→H→I。
2、代码实现
深度优先遍历,也有称为深度优先搜索,简称DFS。其实,就像是一棵树的前序遍历。
算法思想: 它从图中某个结点v出发,访问此顶点,然后从v的未被访问的邻接点出发深度优先遍历图,直至图中所有和v有路径相通的顶点都被访问到。若图中尚有顶点未被访问,则另选图中一个未曾被访问的顶点作起始点,重复上述过程,直至图中的所有顶点都被访问到为止。
这是类似树的前序遍历算法,所以在程序实现上,很像前序遍历,同时在算法复杂度呈现出不同。
//邻接矩阵的深度递归算法 void GraphData::DFS(GraphArray *pArray,int i) { int j = 0; printf("%c",pArray->vex[i]); //打印顶点,也可以其他操作 for (j = 0; j< pArray->numVertexes;j++) { if (!bVisited[j]&&pArray->arg[i][j] == 1) //关键之前初始化时,有关系的边赋值为1,所以由此进行判断 { DFS(pArray,j); //对为访问的邻接顶点递归调用 } } } //邻接矩阵的深度遍历操作 void GraphData::DFSTraverse(GraphArray *pArray) { int i; for (i = 0;i < pArray->numVertexes;i++) { bVisited[i] = false; } for(i = 0; i< pArray->numVertexes;i++) { if (!bVisited[i]) { DFS(pArray,i); } } }
//邻接表的深度递归算法 void GraphData::DFS(GraphList *pList,int i) { EdgeNode *itemNode; bVisited[i] = true; printf("%c",pList->vertexList[i].nNodeData); //打印顶点数据 itemNode = pList->vertexList[i].pFirstNode; while(itemNode) { if (!bVisited[itemNode->nNodevex]) { DFS(pList,itemNode->nNodevex); } itemNode = itemNode->next; } } //邻接表的深度遍历操作 void GraphData::DFSTraverse(GraphList* pList) { int i; GraphList *pGraphList = pList; for ( i = 0;pGraphList->numVertess;i++) { bVisited[i] = false; } for (i = 0;i < pGraphList->numVertess;i++) { if (!bVisited[i]) { DFS(pGraphList,i); } } }
对比两个不同的存储结构的深度优先遍历算法,对于n个顶点e条边的图来说,邻接矩阵由于是二维数组,要查找某个顶点的邻接点需要访问矩阵中的所有元素,因为需要O(n2)的时间。而邻接表做存储结构时,找邻接点所需的时间取决于顶点和边的数量,所以是O(n+e)。显然对于点多边少的稀疏图来说,邻接表结构使得算法在时间效率上大大提高。
三、广度优先搜索遍历
1、原理
图的广度优先遍历算法是一个分层遍历的过程,和二叉树的广度优先遍历类似,其基本思想在于:从图中的某一个顶点Vi触发,访问此顶点后,依次访问Vi的各个为层访问过的邻接点,然后分别从这些邻接点出发,直至图中所有顶点都被访问到。广度优先遍历类似树的层序遍历。
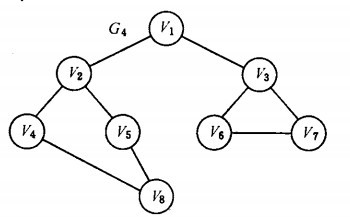

首先访问v1 和v1 的邻接点v2 和v3,然后依次访问v2 的邻接点v4 和v5 及v3 的邻接点v6 和v7,最后访问v4 的邻接点v8。由于这些顶点的邻接点均已被访问,并且图中所有顶点都被访问,由些完成了图的遍历。得到的顶点访问序列为:
v1→v2 →v3 →v4→ v5→ v6→ v7 →v8
和深度优先搜索类似,在遍历的过程中也需要一个访问标志数组。并且,为了顺次访问路径长度为2、3、…的顶点,需附设队列以存储已被访问的路径长度为1、2、… 的顶点。


//邻接矩阵的广度遍历操作 void GraphData::BFSTraverse(GraphArray *pArray) { queue<int> itemQueue; int i,j; for(i = 0 ;i< pArray->numVertexes;i++) { bVisited[i] = false; } for(i = 0;i< pArray->numVertexes;i++)//每个顶点循环 { if (!bVisited[i])//访问未被访问的顶点 { bVisited[i] = true; printf("%c",pArray->vex[i]); itemQueue.push(i); //将此结点入队 while(!itemQueue.empty()) { int m = itemQueue.front(); //结点出队 itemQueue.pop(); for(j = 0;j< pArray->numVertexes;j++) { //判断其他顶点与当前顶点存在边且未被访问过。 if (!bVisited[j] && pArray->arg[m][j] == 1) { bVisited[j] = true; printf("%c",pArray->vex[j]); itemQueue.push(j); } } } } } } //邻接表的广度遍历操作 void GraphData::BFSTraverse(GraphList *pList) { queue<int> itemQueue; int i,j; EdgeNode* pitemNode; for(i = 0 ;i< pList->numVertess;i++) { bVisited[i] = false; } for(i = 0;i<pList->numVertess;i++) { if (!bVisited[i]) { bVisited[i] = true; printf("%c",pList->vertexList[i].nNodeData); itemQueue.push(i); while(!itemQueue.empty()) { int m = itemQueue.front(); itemQueue.pop(); pitemNode = pList->vertexList[m].pFirstNode; while(pitemNode) { if (bVisited[pitemNode->nNodevex]) { bVisited[pitemNode->nNodevex] = true; printf("%c",pList->vertexList[pitemNode->nNodevex].nNodeData); itemQueue.push(pitemNode->nNodevex); } pitemNode = pitemNode->next; } } } } }
总结:对比图的深度优先遍历与广度优先遍历算法,会发现,它们在时间复杂度上是一样的,不同之处仅仅在于对顶点的访问顺序不同。可见两者在全图遍历上是没有优劣之分的,只是不同的情况选择不同的算法。

