线性变换
线性变换
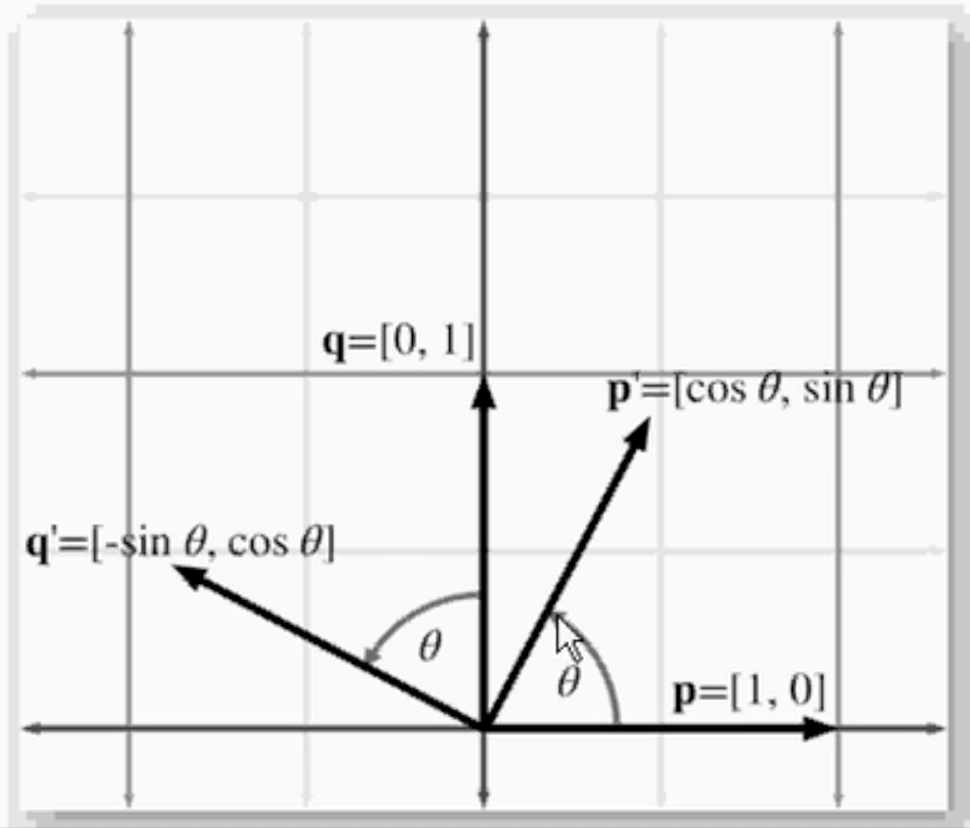
2D旋转
aM = b
2D旋转矩阵
\[\left[
\begin{matrix}
x \\
y
\end{matrix}
\right] \times
\left[
\begin{matrix}
cos\theta & sin\theta \\
-sin\theta & cos\theta
\end{matrix}
\right]
\]
角度与弧度互转
弧度:Math.PI / 180 * deg
角度:180 / Math.PI * radian
div {
width: 100px;
height: 100px;
background: red;
transform:matrix(0.7853981633974483,0.7853981633974483,-0.7853981633974483,0.7853981633974483,0,0);
transform: rotate(45deg);
}
3D旋转
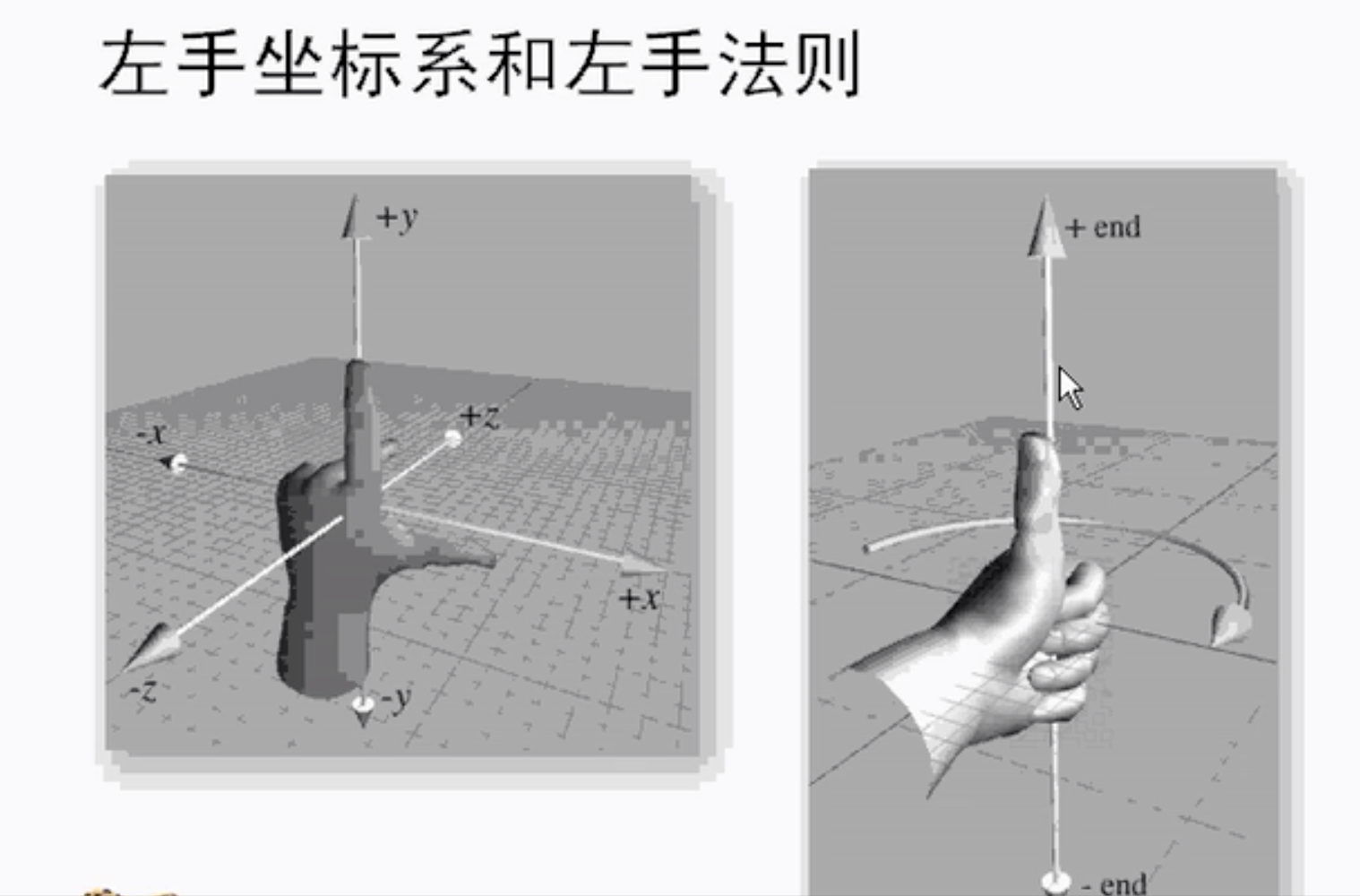
左手坐标系和左手法则
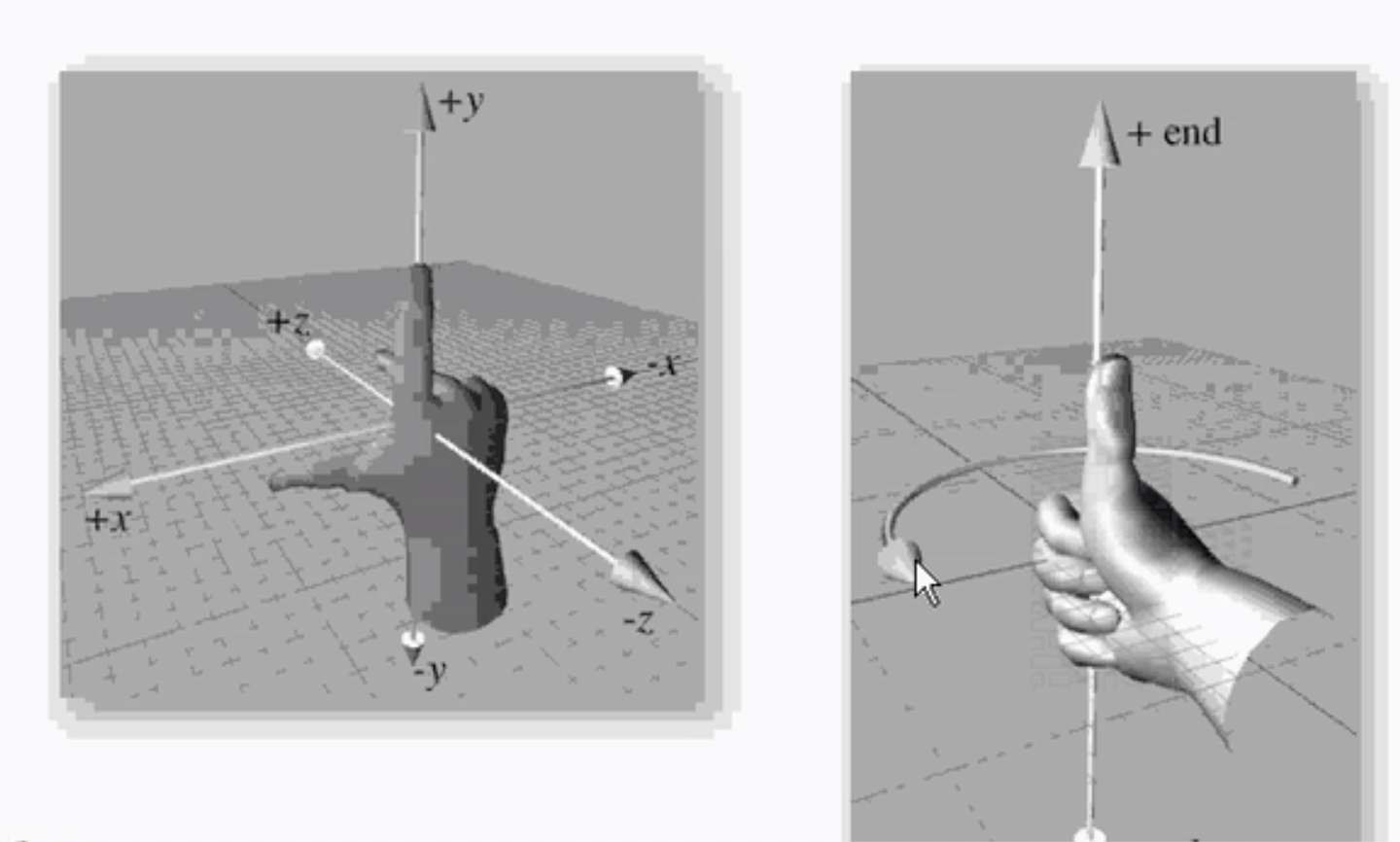
右手坐标系和右手法则
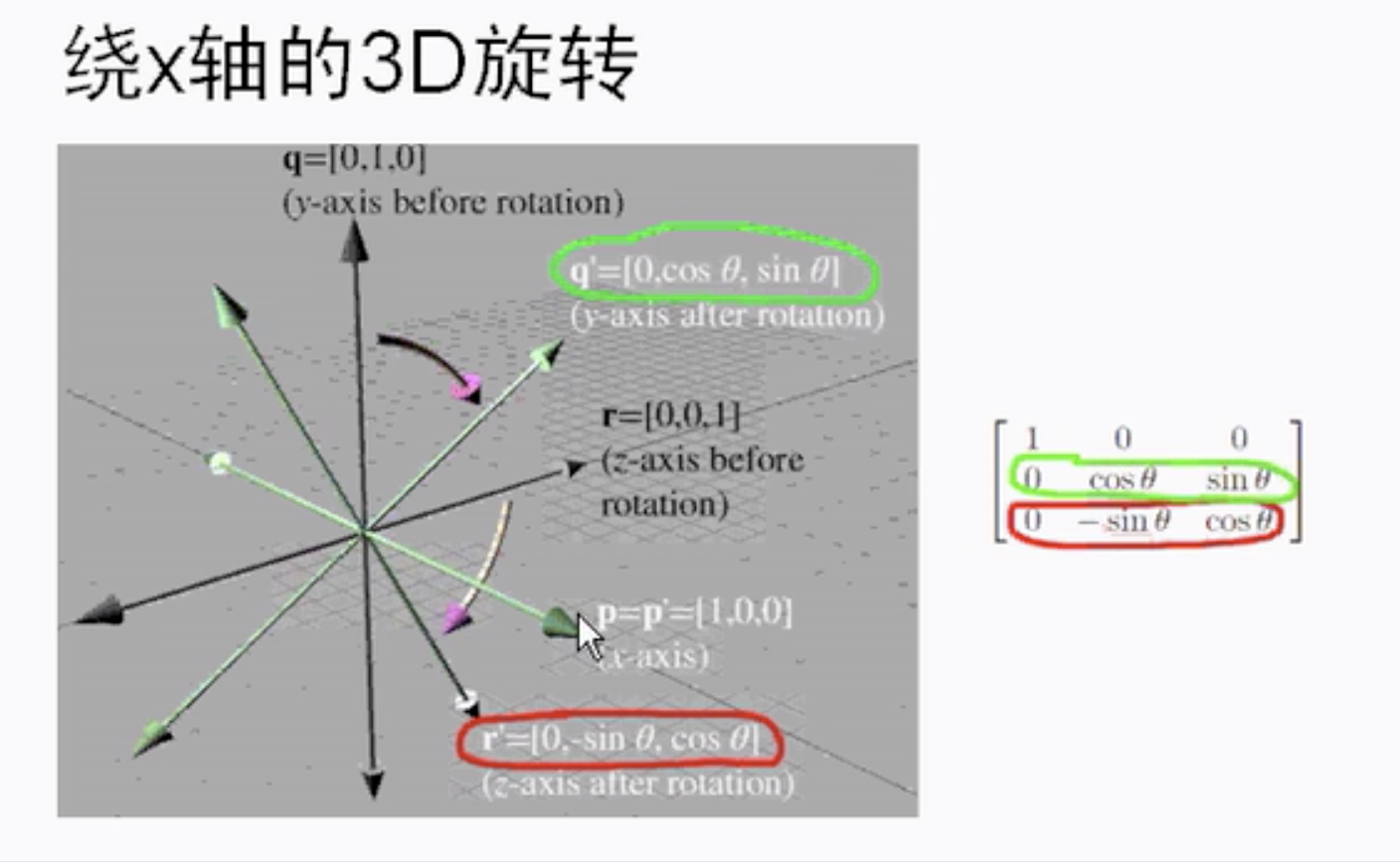
绕x轴旋转
\[\left[
\begin{matrix}
x \\
y \\
z
\end{matrix}
\right] \times
\left[
\begin{matrix}
1 & 0 & 0 \\
0 & cos\theta & sin\theta \\
0 & -sin\theta & cos\theta
\end{matrix}
\right]
\]
绕y轴旋转
\[\left[
\begin{matrix}
x \\
y \\
z
\end{matrix}
\right] \times
\left[
\begin{matrix}
cos\theta & 0 & -sin\theta \\
0 & 1 & 0 \\
sin\theta & 0 & cos\theta
\end{matrix}
\right]
\]
div {
width: 100px;
height: 100px;
background: red;
transform: matrix3d(
0.7853981633974483,0,-0.7853981633974483,0,
0,1,0,0,
0.7853981633974483,0,0.7853981633974483,0,
0,0,0,1
);
}
绕z轴旋转
\[\left[
\begin{matrix}
x \\
y \\
z
\end{matrix}
\right] \times
\left[
\begin{matrix}
cos\theta & sin\theta & 0\\
-sin\theta & cos\theta & 0 \\
0 & 0 & 1
\end{matrix}
\right]
\]

 浙公网安备 33010602011771号
浙公网安备 33010602011771号