
SPATIAL TRANSFORMER NETWORKS
One of the best things about STN is the ability to simply plug it into any existing CNN with very little modification.
# License: BSD # Author: Ghassen Hamrouni from __future__ import print_function import torch import torch.nn as nn import torch.nn.functional as F import torch.optim as optim import torchvision from torchvision import datasets, transforms import matplotlib.pyplot as plt import numpy as np plt.ion() # interactive mode
In this post we experiment with the classic MNIST dataset. Using a standard convolutional network augmented with a spatial transformer network.
from six.moves import urllib opener = urllib.request.build_opener() opener.addheaders = [('User-agent', 'Mozilla/5.0')] urllib.request.install_opener(opener) device = torch.device("cuda" if torch.cuda.is_available() else "cpu") # Training dataset train_loader = torch.utils.data.DataLoader( datasets.MNIST(root='.', train=True, download=True, transform=transforms.Compose([ transforms.ToTensor(), transforms.Normalize((0.1307,), (0.3081,)) ])), batch_size=64, shuffle=True, num_workers=0) # Test dataset test_loader = torch.utils.data.DataLoader( datasets.MNIST(root='.', train=False, transform=transforms.Compose([ transforms.ToTensor(), transforms.Normalize((0.1307,), (0.3081,)) ])), batch_size=64, shuffle=True, num_workers=0)
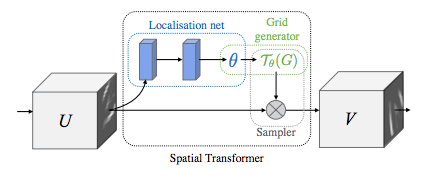
Spatial transformer networks boils down to three main components :
- The localization network is a regular CNN which regresses the transformation parameters. The transformation is never learned explicitly from this dataset, instead the network learns automatically the spatial transformations that enhances the global accuracy.
- The grid generator generates a grid of coordinates in the input image corresponding to each pixel from the output image.
- The sampler uses the parameters of the transformation and applies it to the input image.
-
class Net(nn.Module): def __init__(self): super(Net, self).__init__() self.conv1 = nn.Conv2d(1, 10, kernel_size=5) self.conv2 = nn.Conv2d(10, 20, kernel_size=5) self.conv2_drop = nn.Dropout2d() self.fc1 = nn.Linear(320, 50) self.fc2 = nn.Linear(50, 10) # Spatial transformer localization-network self.localization = nn.Sequential( nn.Conv2d(1, 8, kernel_size=7), nn.MaxPool2d(2, stride=2), nn.ReLU(True), nn.Conv2d(8, 10, kernel_size=5), nn.MaxPool2d(2, stride=2), nn.ReLU(True) ) # Regressor for the 3 * 2 affine matrix self.fc_loc = nn.Sequential( nn.Linear(10 * 3 * 3, 32), nn.ReLU(True), nn.Linear(32, 3 * 2) ) # Initialize the weights/bias with identity transformation self.fc_loc[2].weight.data.zero_() self.fc_loc[2].bias.data.copy_(torch.tensor([1, 0, 0, 0, 1, 0], dtype=torch.float)) # Spatial transformer network forward function def stn(self, x): xs = self.localization(x) xs = xs.view(-1, 10 * 3 * 3) theta = self.fc_loc(xs) theta = theta.view(-1, 2, 3) grid = F.affine_grid(theta, x.size()) x = F.grid_sample(x, grid) return x def forward(self, x): # transform the input x = self.stn(x) # Perform the usual forward pass x = F.relu(F.max_pool2d(self.conv1(x), 2)) x = F.relu(F.max_pool2d(self.conv2_drop(self.conv2(x)), 2)) x = x.view(-1, 320) x = F.relu(self.fc1(x)) x = F.dropout(x, training=self.training) x = self.fc2(x) return F.log_softmax(x, dim=1) model = Net().to(device)
Now, let’s use the SGD algorithm to train the model. The network is learning the classification task in a supervised way. In the same time the model is learning STN automatically in an end-to-end fashion.
-
optimizer = optim.SGD(model.parameters(), lr=0.01) def train(epoch): model.train() for batch_idx, (data, target) in enumerate(train_loader): data, target = data.to(device), target.to(device) optimizer.zero_grad() output = model(data) loss = F.nll_loss(output, target) loss.backward() optimizer.step() if batch_idx % 500 == 0: print('Train Epoch: {} [{}/{} ({:.0f}%)]\tLoss: {:.6f}'.format( epoch, batch_idx * len(data), len(train_loader.dataset), 100. * batch_idx / len(train_loader), loss.item())) # # A simple test procedure to measure the STN performances on MNIST. # def test(): with torch.no_grad(): model.eval() test_loss = 0 correct = 0 for data, target in test_loader: data, target = data.to(device), target.to(device) output = model(data) # sum up batch loss test_loss += F.nll_loss(output, target, reduction='sum').item() # get the index of the max log-probability pred = output.max(1, keepdim=True)[1] correct += pred.eq(target.view_as(pred)).sum().item() test_loss /= len(test_loader.dataset) print('\nTest set: Average loss: {:.4f}, Accuracy: {}/{} ({:.0f}%)\n' .format(test_loss, correct, len(test_loader.dataset), 100. * correct / len(test_loader.dataset)))
Now, we will inspect the results of our learned visual attention mechanism.
We define a small helper function in order to visualize the transformations while training.
-
def convert_image_np(inp): """Convert a Tensor to numpy image.""" inp = inp.numpy().transpose((1, 2, 0)) mean = np.array([0.485, 0.456, 0.406]) std = np.array([0.229, 0.224, 0.225]) inp = std * inp + mean inp = np.clip(inp, 0, 1) return inp # We want to visualize the output of the spatial transformers layer # after the training, we visualize a batch of input images and # the corresponding transformed batch using STN. def visualize_stn(): with torch.no_grad(): # Get a batch of training data data = next(iter(test_loader))[0].to(device) input_tensor = data.cpu() transformed_input_tensor = model.stn(data).cpu() in_grid = convert_image_np( torchvision.utils.make_grid(input_tensor)) out_grid = convert_image_np( torchvision.utils.make_grid(transformed_input_tensor)) # Plot the results side-by-side f, axarr = plt.subplots(1, 2) axarr[0].imshow(in_grid) axarr[0].set_title('Dataset Images') axarr[1].imshow(out_grid) axarr[1].set_title('Transformed Images') for epoch in range(1, 20 + 1): train(epoch) test() # Visualize the STN transformation on some input batch visualize_stn() plt.ioff() plt.show()
欢迎关注我的CSDN博客心系五道口,有问题请私信2395856915@qq.com
