opencv solvepnp函数各种方法比较
官方文档对该函数的介绍:
bool cv::solvePnP(InputArray objectPoints,InputArray imagePoints,InputArray cameraMatrix,InputArray distCoeffs,OutputArray rvec,OutputArray tvec,bool useExtrinsicGuess = false,int flags = SOLVEPNP_ITERATIVE )
已知匹配的世界坐标系中的3D点和像素平面的上2D点。计算出世界坐标系中的点到相机坐标系中3D点的旋转和平移。
最后一个参数 int flags可以指定用不同的方法求解PnP问题,默认使用SOLVEPNP_ITERATIVE (迭代法)。此外,还可以使用SOLVEPNP_P3P,SOLVEPNP_EPNP等方法。
这里以这三种方法对比:
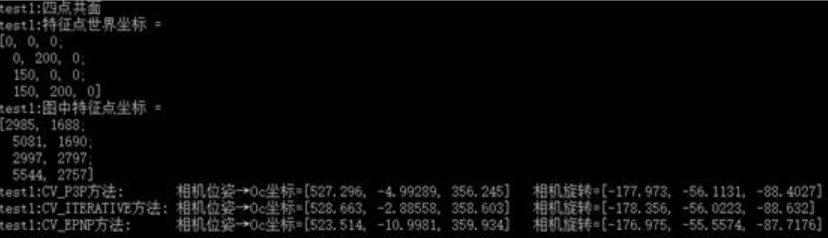
- SOLVEPNP_ITERATIVE:只能用四个共面的点来求解。使用列文伯格马夸尔特法迭代求解。
- SOLVEPNP_P3P:可以使用任意4个特征点求解,不要求共面,特征点数量不为4时报错。参考论文《complete solution classification for perspective-n-point problem》
- SOLVEPNP_EPNP:只要特征点数量大于3就可求出正解。参考论文《EPnP: Efficient Perspective-n-Point Camera Pose Estimation》
使用四个共面特征点,都计算出了结果,略有差异。
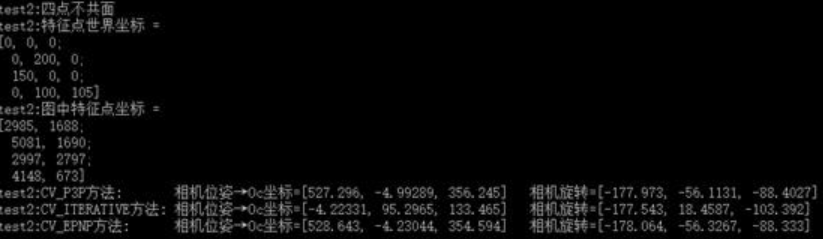
使用四个非共面点,迭代法结果偏了。
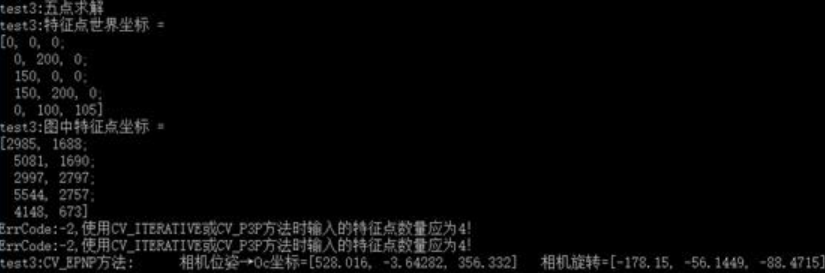
使用5个特征点,只有EPNP能用。
用时比较,P3P方法耗时最短。

参考:
https://www.cnblogs.com/singlex/p/pose_estimation_1_1.html
https://docs.opencv.org/3.4.10/d9/d0c/group__calib3d.html#ga549c2075fac14829ff4a58bc931c033d

 浙公网安备 33010602011771号
浙公网安备 33010602011771号