
opencv3 C++ SIFT,SURF特征检测函数用法
因为对opencv还不够熟练,所以在调试的时候浪费了很多时间,网上找的代码也时各种版本参杂,试了好久老是报错,
在这里自己记录一下。
我在ubuntu1804下进行,opencv版本是3.4.10及对应的contrib。测试主要有三个文件,png图片一张,cpp文件一个以及一个CMakeLists.txt。
CMakeLists.txt如下:
1 cmake_minimum_required(VERSION 2.8) 2 3 set(CMAKE_BUILD_TYPE "Release") 4 # 添加c++ 11标准支持 5 set(CMAKE_CXX_FLAGS "-std=c++11 -O2") 6 7 # 寻找OpenCV库 8 find_package(OpenCV REQUIRED) 9 # 添加头文件 10 include_directories(${OpenCV_INCLUDE_DIRS}) 11 12 add_executable(ttt ttt.cpp) 13 target_link_libraries(ttt ${OpenCV_LIBS})
ttt.cpp文件如下:
#include <vector> #include <opencv2/opencv.hpp> #include <opencv2/xfeatures2d.hpp> using namespace std; using namespace cv; int main(int argc, char** argv) { cv::Mat img = cv::imread("./1.png", CV_LOAD_IMAGE_GRAYSCALE); cv::Mat out_img,des; vector<cv::KeyPoint> pts; Ptr<xfeatures2d::SIFT> sift=cv::xfeatures2d::SIFT::create(); sift->detectAndCompute(img,cv::noArray(),pts,des); //检测到的特征为pts,同时计算描述子为des // sift->detect(img,pts);//只进行检测特征 /* Ptr<xfeatures2d::SURF> surf=cv::xfeatures2d::SURF::create(); surf->detectAndCompute(img,cv::noArray(),pts,des); // surf->detect(img,pts); */ cv::drawKeypoints(img,pts,out_img); cv::imshow("Image", out_img); //cv::imwrite("sift.png",out_img); cv::waitKey(0); return 0; }
SIFT的create函数默认参数共5个,为int nfeatures = 0,int nOctaveLayers = 3,double contrastThreshold = 0.04,double edgeThreshold = 10,double sigma = 1.6
其中nfeatures为保留的特征数(根据分数排序后),0表示保留所有检测到的特征,也可以sift=cv::xfeatures2d::SIFT::create(100);保留分数最高的100个特征点。其余
参数以及介绍见https://docs.opencv.org/3.4.10/d5/d3c/classcv_1_1xfeatures2d_1_1SIFT.html
SURF的create函数默认参数也是5个,为double hessianThreshold=100, int nOctaves=4, int nOctaveLayers=3, bool extended=false, bool upright=false。
emm...并没有给现成的参数控制特征点数量,其他内容详见 https://docs.opencv.org/3.4.10/d5/df7/classcv_1_1xfeatures2d_1_1SURF.html
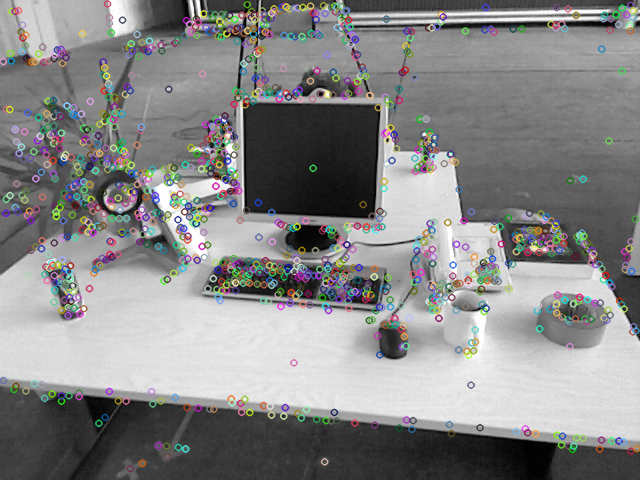
png图片:

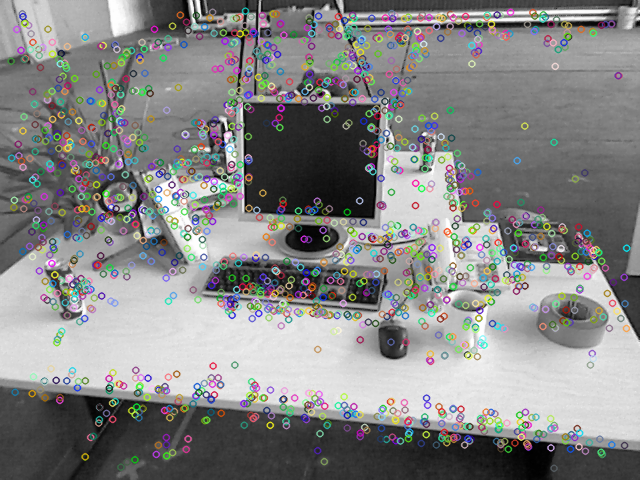
检测结果:SIFT和SURF

 浙公网安备 33010602011771号
浙公网安备 33010602011771号