
参数化(parameterization)
建立一个三角网格曲面的参数化意味着找到一个坐标集合(ui,vi)与每一个顶点对应,坐标集合应该满足如下的条件:参数化之后的面不会自交。
几种不同的参数化方法:
重心映射( Barycentric Mapping)
重心映射是比较常见的三角网格参数化方法。给定一个三角网格曲面与圆盘(disk)同胚,如果边界顶点参数化之后的点连成一个凸多边形,内部顶点参数化之后的点是它1-邻域的顶点参数化之后坐标的凸组合,这样的参数化方法就是一种有效的参数化方法(不会自交)。
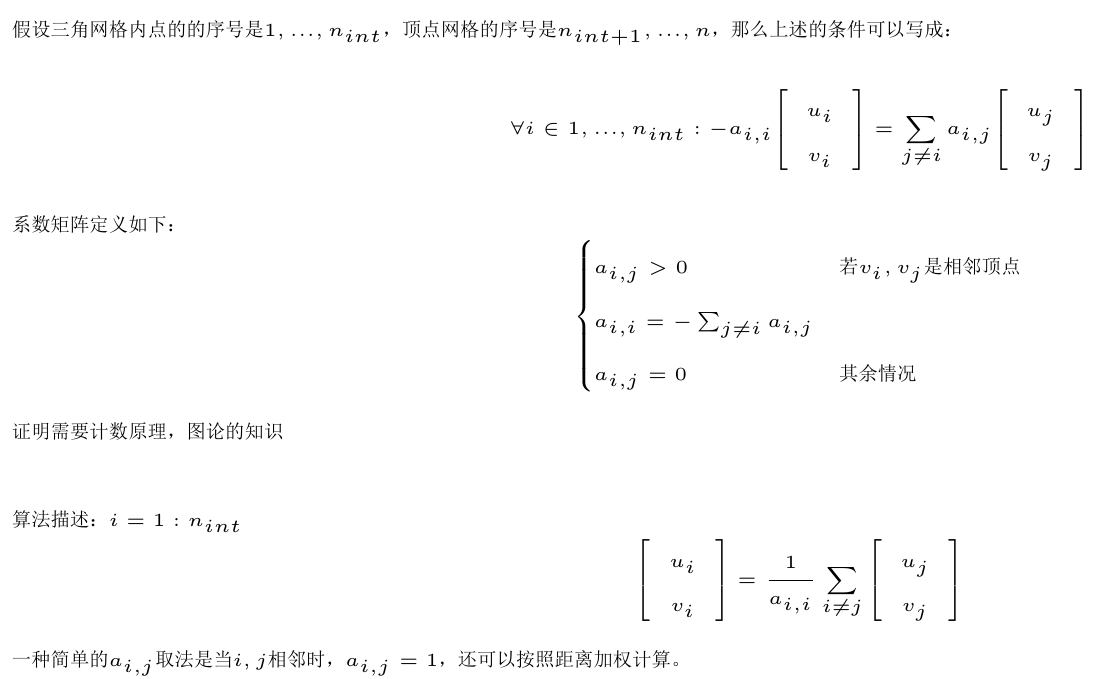
拉普拉斯算子
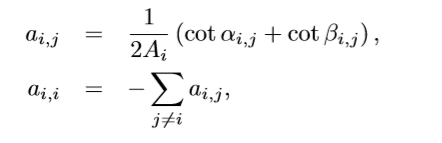
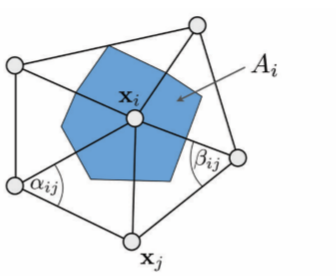
拉普拉斯算子衡量函数的规则性,例如,线性函数的;拉普拉斯算子为0,因此,极小化u,v的拉普拉斯算子可以得到光滑的参数化坐标,话句话说,极小化了参数化之后的扭曲。用离散微分几何的拉普拉斯算子可以计算ai,j

 浙公网安备 33010602011771号
浙公网安备 33010602011771号