高精地图HD map, 轻高精地图LD map,导航地图SD map
本文摘自:
============================================
高精度地图(High Definition Map,简称HD Map)是一种基于先进的测绘技术和高精度定位数据,提供精确、详细道路信息及环境感知数据的数字地图。它不仅包含传统地图所具备的基本地理信息,还提供更为细致的车道级别几何形状、交通规则、交通标识、交通流量等详尽数据。其核心特点包括:
- 高精度定位:高精度地图依赖于精确的定位技术,如全球卫星导航系统(GNSS)、惯性测量单元(IMU)和激光雷达等传感器数据,实现对车辆位置的高精度定位。
- 车道级别信息:高精度地图提供车道级别的详细信息,包括车道数量、车道宽度、车道标线、限速标识等,帮助车辆进行精准路径规划和决策。
- 动态数据更新:高精度地图支持实时或定期更新,及时反映道路变化、施工区域、交通事故等动态信息,确保地图数据的准确性和时效性。
- 环境感知数据:高精度地图提供丰富的环境感知数据,如障碍物位置、形状、类型等,为车辆的智能决策和行驶安全提供重要参考。
- 数据标准化:为了实现高精度地图的互操作性和共享性,制定统一的数据标准是必要的,以确保不同地图提供商生成的地图数据可以无缝集成和使用。
HD地图(High Definition Map)和SD地图(Standard Definition Map)之间的区别主要体现在以下几个方面:
- 数据精度:HD地图相较于SD地图具有更高的数据精度。HD地图通常包含更为详尽和精确的地图信息,如车道级别的道路几何信息、交通标识、交通规则等,以及环境感知数据如障碍物位置、行人位置等。SD地图则相对简略,提供的信息较为基础和概略。
- 更新频率:由于HD地图中包含了更多的实时数据和动态信息,其更新频率一般会更高。而SD地图可能更新速度较慢,更新的内容也相对简单。
- 应用场景:HD地图主要应用于自动驾驶、智能交通系统等对地图精度要求极高的领域。这些领域需要准确的道路几何信息、精确的车辆定位以及实时的环境感知数据来支持车辆的高级驾驶功能。而SD地图则更适用于传统导航、地理信息查询等一般应用场景。
- 数据量和处理复杂度:HD地图由于包含更多的细节信息和实时数据,因此数据量和处理复杂度通常更大。相比之下,SD地图的数据量和处理复杂度相对较低。
HD map存储的主体则是车道,数据精度通常是分米级别,储存的地图信息也更丰富,包括车道线的几何信息,道路设施,比如道路是否在施工等信息。具体而言,高精地图存储的信息包括几何信息和逻辑信息,几何信息包括物体间的空间位置,然后还有逻辑信息,其中包括语义信息和拓扑关系。而高精地图的数据模型主要包括三类信息,第一是空间信息,包括车道模型和道路设施;第二个是语义信息,包括环境和物体;第三类是时间信息,包括早晚时间要求不一样的潮汐街道,红绿灯和电子标识盘等;此外,高精地图中的道路也会有一些数学相关的属性,比如曲率,航向角,横纵坡度的数字化表达等。
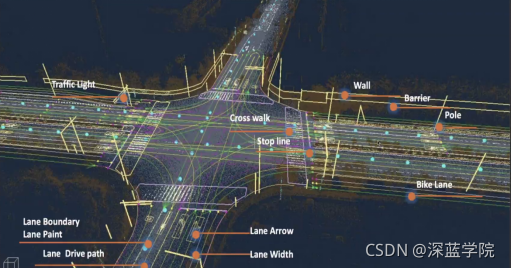
轻量级高精地图(LD map)——不做路灯牌等不影响行车功能的因素,只做车道线、停止线等必备的地图要素。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号