电磁波光谱、激光雷达和毫米波雷达
本文摘自:
- 光谱(光学频谱)分布图及波长_光谱波长全谱图-CSDN博客
- 谈谈激光雷达的波长 - 知乎 (zhihu.com)
- 自动驾驶汽车传感器技术解析—毫米波雷达 - 知乎 (zhihu.com)
- 自动驾驶汽车传感器技术解析——激光雷达 - 知乎 (zhihu.com)
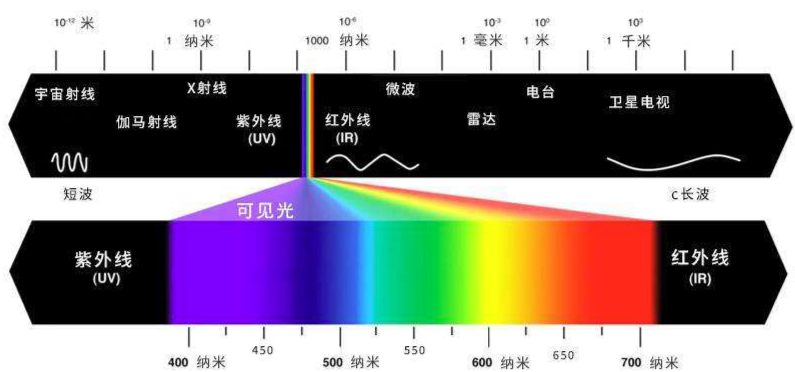
电磁波与光谱
电磁波是以波动形式传播的电磁场。相同方向且相互垂直的电场和磁场。电磁波的传播,不依赖于介质,就算在真空中,也可以传播。
波长越长,绕射的能力越强,例如无线电波(波长大于1mm)可以绕过高楼大厦传播。
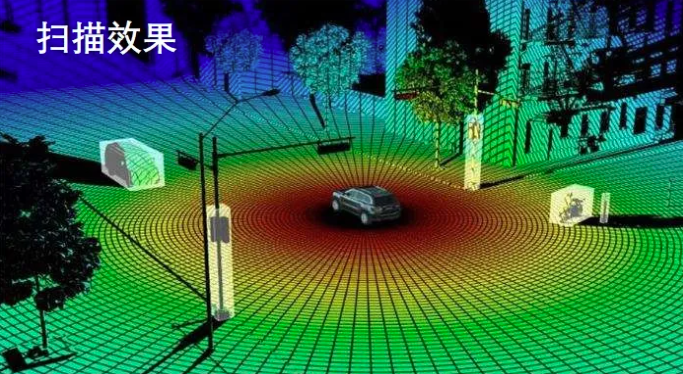
激光雷达
激光雷达(Light Detection and Ranging,Lidar)是一种光学遥感技术,通过向目标照射一束光,通常是一束脉冲激光,来测量目标的距离等参数。
雷达(Radio Detection and Ranging,Radar)是指无线电的探测和测量。其实这两者工作原理相似,区别在于发射信号不同,Lidar采用的是脉冲激光(脉冲式的),而Radar采用的是无线电波(连续波)。脉冲式的雷达通过脉冲发送和接收的时间差来确定目标的距离,无法测量目标的速度,但是Lidar具有优异的方位分辨率,能够精确地检测到与周围障碍物的距离和位置关系,并能实时检测到具有低无线电波反射率的物体 (标志,树木等);Radar的无线电波比Lidar的激光波长,其返回的物体图像不如Lidar精确,但它覆盖远距离、具有强穿透性,可在雨,雪,尘土等恶劣环境中返回信息。
激光雷达中常用的波长有850nm,905nm和1550nm,都属于红外光的范围。
850nm的激光雷达一般用于近距。因为容易发生红暴,红暴是由于所发射的红外线中包含可见光的成分。900nm以上的红外线基本无红暴,波长越短,红暴越强,红外线感应度也越高。北醒TF02激光雷达是一款单点测距激光雷达,量程可达22m,可在室外强光下稳定工作。
传统激光雷达以905nm波长近红外激光为主,该波长激光器件相对成熟,成本较低,但考虑到人眼安全要求,激光功率受到明显限制,同时太阳光中存在较多近红外背景光,传感器信噪比物理上受限,最大探测距离限制在150米左右。905nm产品有velodyne、速腾聚创、镭神等。
用于激光雷达的边发射激光器,最常用的是InGaAs/GaAs应变量子阱脉冲激光二极管(PLD, Pulsed laser diode),波长以905 nm最为流行。
相较于1550 nm波长,905 nm的主要优点是硅在该波长处吸收光子,而硅基光电探测器通常比探测1550 nm光所需的铟镓砷(InGaAs)近红外探测器更加成熟,从成本和整体成熟度方面来讲是大批量应用的必然选择,性价比更高。
1550 nm波长的激光光源也是某些车载激光雷达产品选择的光。原因是1550 nm激光远离人眼吸收的可见光光谱,相比于905 nm激光, 同等功率的1550 nm激光人眼安全性提高40倍。背景光干扰问题相对较小,可以实现远距离探测;同时采用相干技术,探测器只对自身发射的激光回波响应,信噪比远高于905nm-ToF激光雷达,最大探测距离可以达到1000米以上,特殊场景下可以达到数公里。
在相同人眼安全等级的功率下,905 nm激光雷达很难在200 m以外的高速公路上看到高度为10 cm左右的物体,但是1550 nm激光雷达却可以将检测距离提高到300 m以上。此外,1550 nm配合调频连续波(FMCW)的技术,不仅可以检测距离,同时可以利用多普勒频移来测量物体的速度。大气穿透能力强,人眼安全性高是1550 nm激光光源的显著特点,但是相较于905 nm激光雷达,1550 nm激光雷达在光源及探测器成本、体积以及供应链成熟度上还有明显的不足。
1550 nm激光雷达一般采用光纤激光器作为光源, 主要厂家有法国Lumibird、昂纳此外也有一些激光雷达公司采用自已开发的光纤激光器,如美国Luminar、镭神智能等。
车载激光雷达应用算法可分为三类:
- 点云分割算法,这是目标跟踪与识别的基础;
- 目标跟踪与识别算法,即实现对汽车周围障碍物运动状态和几何特征的判断;
- 时定位与地图构建算法(SLAM),即实现汽车的精确定位与可通行路径规划。
激光雷达的优点:
- 测距精度、测距范围,以及对温度和光照的适应性都很好。
激光雷达的缺点:
- 价格昂贵,成本高;
- 激光雷达的探测光束容易受大气吸收、散射、折射效应的影响。
毫米波雷达
毫米波雷达,是工作在毫米波波段(millimeter wave )的雷达,通常是指30~300GHz (波长为1~10mm) 频段。毫米波的波长介于厘米波和光波之间,与红外、激光、电视等光学雷达相比,毫米波雷达穿透雾、烟、灰尘的能力强,具有全天候、全天时的特点。
毫米波雷达的工作原理:
-
发射毫米波信号:毫米波雷达通过振荡器产生频率逐渐增加的信号。这些信号以电磁波形式传播,经过障碍物后会反弹回来。
-
接收反弹信号:当反弹的电磁波遇到目标(例如车辆或物体)时,它会返回雷达系统。返回的波形与发出的波形之间存在频率差,这与目标的距离有关。
-
测量时延和频率差:通过测量反弹信号的时延和频率差,毫米波雷达可以计算出目标的距离和速度。
毫米波雷达可以实现自适应巡航控制(Adaptive Cruise Control),前向防撞报警(Forward Collision Warning),盲点检测(Blind Spot Detection),辅助停车(Parking aid),辅助变道(Lane change assistant)等高级驾驶辅助系统(ADAS)功能。
车载毫米波雷达是目前唯一的一型号全天时、全天候的车载雷达传感器,是实现自动驾驶的传感器方案中的标配。
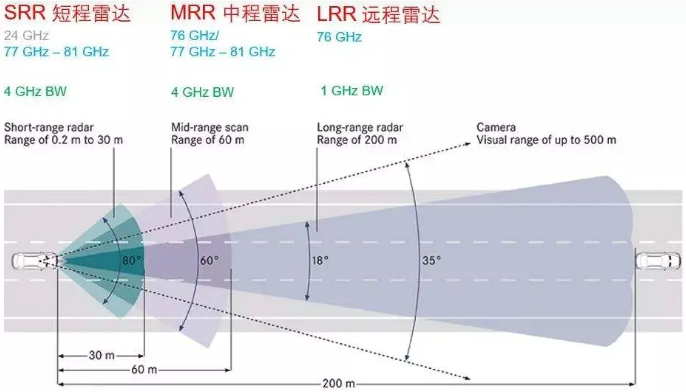
目前汽车毫米波雷达频率分为24GHz, 77GHz至79GHz 三种频段:
- 24GH又称为短波雷达,感测距离从0.15公尺至约30公尺左右,主要作为停车辅助(Parking Assist) ;
- 77GHz感测距离从1公尺至约100公尺左右,主要作为盲点探测 (Blind Spot Detection) ,
- 79GHz感测范围可到250公尺,因此运用在主动巡航系统(Adaptive Cruise Control)与汽车前向碰撞报警系统(Forward Collision Warning System), 让车主有足够的时间来煞车或闪避。
毫米波雷达的优势:
- 可以全天候工作,即不良天气、夜晚等环境下可以发挥作用,而激光雷达会受雨雪雾霾的影响;
- 测距远,200 米以上都轻易胜任;
- 成本较低,技术相对成熟。
毫米波雷达的缺点:
- 分辨率低、较难成像,无法识别图像。因此不能作为激光雷达的替代品,而是激光雷达的重要补充设备。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号