proteus 仿真-STM32F103C8T6驱动四位数码管
STM32F103C8T6 介绍
STM32F103C8T6 是意法半导体(STMicroelectronics)推出的一款高性能、低功耗的32位微控制器,属于STM32F1系列。
它广泛应用于嵌入式系统开发,适用于需要高性能处理、低功耗和丰富外设接口的场景。以下是关于STM32F103C8T6的详细介绍:
1. 基本特性
-
处理器:ARM Cortex-M3 32位RISC处理器,主频最高可达72MHz。
-
存储器:
-
闪存(Flash):64KB。
-
SRAM:20KB。
-
EEPROM:支持外部EEPROM。
-
-
工作电压:2.0V至3.6V。
-
工作温度:-40°C至85°C(工业级)。
2. 外设接口
-
GPIO:
-
提供多个GPIO引脚,支持多种工作模式(输入、输出、中断、复用功能等)。
-
-
通信接口:
-
USART:3个USART接口。
-
SPI:2个SPI接口。
-
I2C:2个I2C接口。
-
CAN:1个CAN接口。
-
USB:支持USB 2.0全速设备。
-
-
定时器:
-
通用定时器:多个通用定时器,支持PWM输入/输出、捕获/比较功能。
-
高级定时器:支持多通道PWM输出,适用于电机控制。
-
-
ADC和DAC:
-
ADC:12位模数转换器,支持多通道采样。
-
DAC:2通道12位数模转换器。
-
-
其他外设:
-
外部中断/事件控制器(EXTI)。
-
看门狗定时器(WDT)。
-
窗口看门狗定时器(WWDT)。
-
DMA控制器。
-
3. 低功耗特性
-
多种低功耗模式:
-
睡眠模式:CPU暂停运行,外设可继续工作。
-
停机模式:仅保留基本时钟和少量外设。
-
待机模式:最低功耗模式,仅保留唤醒功能。
-
-
低功耗外设:支持低功耗运行的ADC、定时器等。
4. 开发工具
-
集成开发环境(IDE):
-
Keil uVision:广泛使用的商业IDE,支持STM32开发。
-
STM32CubeIDE:ST公司官方提供的免费IDE,支持代码生成、调试等功能。
-
-
编译器:
-
ARM Compiler:用于编译C/C++代码。
-
GCC for ARM:开源编译器,适用于嵌入式开发。
-
-
调试工具:
-
ST-Link:ST公司提供的调试器,支持硬件调试和代码下载。
-
J-Link:第三方调试器,支持多种调试功能。
-
5. 应用领域
-
工业自动化:电机控制、传感器数据采集。
-
物联网(IoT):智能设备、传感器节点。
-
消费电子:智能家居、穿戴设备。
-
医疗设备:便携式医疗设备、健康监测设备。
-
汽车电子:车载娱乐系统、传感器接口。
6. 开发资源
-
官方文档:ST公司提供了详细的参考手册、数据手册和应用笔记。
-
开发板:如STM32F103C8T6开发板,方便快速开发和测试。
-
社区支持:丰富的在线社区资源,包括开发教程、代码示例和问题解答。
7. 优势
-
高性能:Cortex-M3内核提供高性能处理能力。
-
低功耗:多种低功耗模式,适合电池供电设备。
-
丰富的外设:支持多种通信接口和外设,满足多种应用场景。
-
开发友好:强大的开发工具支持,易于上手。
数码管介绍
码管是一种用于显示数字的电子元件,广泛应用于各种电子设备中,如电子表、计算器、电子秤等。以下是关于数码管的详细介绍,包括其类型、工作原理、引脚定义以及如何与微控制器(如STM32)连接和控制。

1. 数码管的类型
数码管主要分为两种类型:共阳极和共阴极。
(1)共阳极数码管
• 特点:所有段的阳极(正极)连接在一起,通过控制阴极(负极)来点亮对应的段。
• 优点:适合使用NPN型三极管或低电平驱动的电路。
• 缺点:在某些情况下,需要额外的电平转换电路。
(2)共阴极数码管
• 特点:所有段的阴极(负极)连接在一起,通过控制阳极(正极)来点亮对应的段。
• 优点:适合使用PNP型三极管或高电平驱动的电路,直接与微控制器连接时较为方便。
• 缺点:在某些情况下,需要额外的电平转换电路。

2. 数码管的引脚定义
数码管通常有8个段(a-g和DP),分别对应数字的各个部分。以下是数码管的引脚定义: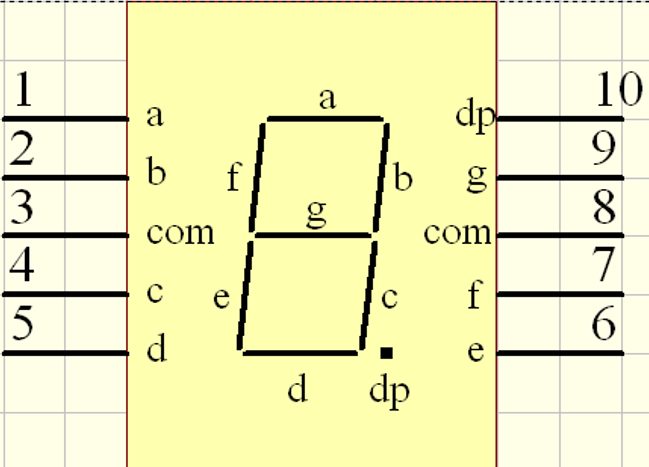
延时函数
void delay100(int xms) { while(xms--); }
段码代码实现
unsigned char code[] ={0xC0, 0x79,0x24, 0x30, 0x19, 0x12, 0x02, 0x78,0x00, 0x10, 0x08, 0x03, 0x46,0x21, 0x06, 0x0e};//共阳数码管 显示点 //段码初始化函数 #define G_GPIO_PIN GPIO_Pin_1 #define F_GPIO_PIN GPIO_Pin_2 #define E_GPIO_PIN GPIO_Pin_3 #define D_GPIO_PIN GPIO_Pin_4 #define C_GPIO_PIN GPIO_Pin_5 #define B_GPIO_PIN GPIO_Pin_6 #define A_GPIO_PIN GPIO_Pin_7 //段码初始化函数 void smg_duanma(void) { GPIO_InitTypeDef GPIO_InitStructure; //打开时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE); //推挽输出 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; GPIO_InitStructure.GPIO_Pin = A_GPIO_PIN | B_GPIO_PIN | C_GPIO_PIN | D_GPIO_PIN | E_GPIO_PIN | F_GPIO_PIN | G_GPIO_PIN ; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB,&GPIO_InitStructure); GPIO_SetBits(GPIOB, A_GPIO_PIN | B_GPIO_PIN | C_GPIO_PIN | D_GPIO_PIN | E_GPIO_PIN | F_GPIO_PIN | G_GPIO_PIN); } //段码显示函数 void smg_duanma_Display(GPIO_TypeDef* GPIOx,u8 val) { uint16_t display_val = val << 7; GPIO_Write(GPIOx,display_val); display_val =0xff; }
位码代码实现
//位码初始化 void smg_weima(void) { GPIO_InitTypeDef GPIO_InitStructure; //打开时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); //推挽输出 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1 | GPIO_Pin_3 | GPIO_Pin_2 | GPIO_Pin_4; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA,&GPIO_InitStructure); GPIO_SetBits(GPIOA, GPIO_Pin_1 | GPIO_Pin_3 | GPIO_Pin_2 | GPIO_Pin_4); }
数码管显示函数
//数码管显示函数 void smg_data(char weizhi,char num) { switch(weizhi) { case 1 : GPIO_SetBits(GPIOA, GPIO_Pin_4); GPIO_ResetBits(GPIOA, GPIO_Pin_3); GPIO_ResetBits(GPIOA, GPIO_Pin_2); GPIO_ResetBits(GPIOA, GPIO_Pin_1); break; case 2 : GPIO_ResetBits(GPIOA, GPIO_Pin_4); GPIO_SetBits(GPIOA, GPIO_Pin_3); GPIO_ResetBits(GPIOA, GPIO_Pin_2); GPIO_ResetBits(GPIOA, GPIO_Pin_1); break; case 3 : GPIO_ResetBits(GPIOA, GPIO_Pin_4); GPIO_ResetBits(GPIOA, GPIO_Pin_3); GPIO_SetBits(GPIOA, GPIO_Pin_2); GPIO_ResetBits(GPIOA, GPIO_Pin_1); break; case 4 : GPIO_ResetBits(GPIOA, GPIO_Pin_4); GPIO_ResetBits(GPIOA, GPIO_Pin_3); GPIO_ResetBits(GPIOA, GPIO_Pin_2); GPIO_SetBits(GPIOA, GPIO_Pin_1); break; } /* #define G_GPIO_PIN GPIO_Pin_1 #define F_GPIO_PIN GPIO_Pin_2 #define E_GPIO_PIN GPIO_Pin_3 #define D_GPIO_PIN GPIO_Pin_4 #define C_GPIO_PIN GPIO_Pin_5 #define B_GPIO_PIN GPIO_Pin_6 #define A_GPIO_PIN GPIO_Pin_7 */ switch(num) { case 0 : //G不亮 给0亮 给1灭 GPIO_ResetBits(GPIOB, A_GPIO_PIN); GPIO_ResetBits(GPIOB, B_GPIO_PIN); GPIO_ResetBits(GPIOB, C_GPIO_PIN); GPIO_ResetBits(GPIOB, D_GPIO_PIN); GPIO_ResetBits(GPIOB, E_GPIO_PIN); GPIO_ResetBits(GPIOB, F_GPIO_PIN); GPIO_SetBits( GPIOB, G_GPIO_PIN); //smg_duanma_Display(GPIOB,code[0]); break; case 1 : //只有bc亮 给0亮 给1灭 GPIO_SetBits(GPIOB, A_GPIO_PIN); GPIO_ResetBits(GPIOB, B_GPIO_PIN); GPIO_ResetBits(GPIOB, C_GPIO_PIN); GPIO_SetBits(GPIOB, D_GPIO_PIN); GPIO_SetBits(GPIOB, E_GPIO_PIN); GPIO_SetBits(GPIOB, F_GPIO_PIN); GPIO_SetBits( GPIOB, G_GPIO_PIN); //smg_duanma_Display(GPIOB,code[1]); break; case 2 : //只有abdf亮 给0亮 给1灭 GPIO_ResetBits(GPIOB, A_GPIO_PIN); GPIO_ResetBits(GPIOB, B_GPIO_PIN); GPIO_SetBits(GPIOB, C_GPIO_PIN); GPIO_ResetBits(GPIOB, D_GPIO_PIN); GPIO_ResetBits(GPIOB, E_GPIO_PIN); GPIO_SetBits(GPIOB, F_GPIO_PIN); GPIO_ResetBits( GPIOB, G_GPIO_PIN); //smg_duanma_Display(GPIOB,code[1]); break; case 3 : //只有abcdg亮 给0亮 给1灭 GPIO_ResetBits(GPIOB, A_GPIO_PIN); GPIO_ResetBits(GPIOB, B_GPIO_PIN); GPIO_ResetBits(GPIOB, C_GPIO_PIN); GPIO_ResetBits(GPIOB, D_GPIO_PIN); GPIO_SetBits(GPIOB, E_GPIO_PIN); GPIO_SetBits(GPIOB, F_GPIO_PIN); GPIO_ResetBits( GPIOB, G_GPIO_PIN); //smg_duanma_Display(GPIOB,code[1]); break; case 4 : //只有bcfg亮 给0亮 给1灭 GPIO_SetBits(GPIOB, A_GPIO_PIN); GPIO_ResetBits(GPIOB, B_GPIO_PIN); GPIO_ResetBits(GPIOB, C_GPIO_PIN); GPIO_SetBits(GPIOB, D_GPIO_PIN); GPIO_SetBits(GPIOB, E_GPIO_PIN); GPIO_ResetBits(GPIOB, F_GPIO_PIN); GPIO_ResetBits( GPIOB, G_GPIO_PIN); //smg_duanma_Display(GPIOB,code[1]); break; case 5 : //只有acdfg亮 给0亮 给1灭 GPIO_ResetBits(GPIOB, A_GPIO_PIN); GPIO_SetBits(GPIOB, B_GPIO_PIN); GPIO_ResetBits(GPIOB, C_GPIO_PIN); GPIO_ResetBits(GPIOB, D_GPIO_PIN); GPIO_SetBits(GPIOB, E_GPIO_PIN); GPIO_ResetBits(GPIOB, F_GPIO_PIN); GPIO_ResetBits( GPIOB, G_GPIO_PIN); //smg_duanma_Display(GPIOB,code[1]); break; case 6 : //只有acdefg亮 给0亮 给1灭 GPIO_ResetBits(GPIOB, A_GPIO_PIN); GPIO_SetBits(GPIOB, B_GPIO_PIN); GPIO_ResetBits(GPIOB, C_GPIO_PIN); GPIO_ResetBits(GPIOB, D_GPIO_PIN); GPIO_ResetBits(GPIOB, E_GPIO_PIN); GPIO_ResetBits(GPIOB, F_GPIO_PIN); GPIO_ResetBits( GPIOB, G_GPIO_PIN); //smg_duanma_Display(GPIOB,code[1]); break; case 7 : //只有abc亮 给0亮 给1灭 GPIO_ResetBits(GPIOB, A_GPIO_PIN); GPIO_ResetBits(GPIOB, B_GPIO_PIN); GPIO_ResetBits(GPIOB, C_GPIO_PIN); GPIO_SetBits(GPIOB, D_GPIO_PIN); GPIO_SetBits(GPIOB, E_GPIO_PIN); GPIO_SetBits(GPIOB, F_GPIO_PIN); GPIO_SetBits(GPIOB, G_GPIO_PIN); //smg_duanma_Display(GPIOB,code[1]); break; case 8 : //只有abcdefg亮 给0亮 给1灭 GPIO_ResetBits(GPIOB, A_GPIO_PIN); GPIO_ResetBits(GPIOB, B_GPIO_PIN); GPIO_ResetBits(GPIOB, C_GPIO_PIN); GPIO_ResetBits(GPIOB, D_GPIO_PIN); GPIO_ResetBits(GPIOB, E_GPIO_PIN); GPIO_ResetBits(GPIOB, F_GPIO_PIN); GPIO_ResetBits( GPIOB, G_GPIO_PIN); //smg_duanma_Display(GPIOB,code[1]); break; case 9 : //只有abcdfg亮 给0亮 给1灭 GPIO_ResetBits(GPIOB, A_GPIO_PIN); GPIO_ResetBits(GPIOB, B_GPIO_PIN); GPIO_ResetBits(GPIOB, C_GPIO_PIN); GPIO_ResetBits(GPIOB, D_GPIO_PIN); GPIO_SetBits(GPIOB, E_GPIO_PIN); GPIO_ResetBits(GPIOB, F_GPIO_PIN); GPIO_ResetBits( GPIOB, G_GPIO_PIN); //smg_duanma_Display(GPIOB,code[1]); break; } delay100(200); GPIO_SetBits(GPIOB, A_GPIO_PIN | B_GPIO_PIN | C_GPIO_PIN | D_GPIO_PIN | E_GPIO_PIN | F_GPIO_PIN | G_GPIO_PIN ); GPIO_SetBits(GPIOA, GPIO_Pin_3|GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_4); }
按键初始化和按键扫描
//按键123 pa0 6 7初始化 void Key_Init067(void) { GPIO_InitTypeDef GPIO_InitStructure; /*开启时钟*/ RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOB的时钟 /*GPIO初始化*/ GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 |GPIO_Pin_6 ;//|GPIO_Pin_7 ; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStructure); //将PB1和PB11引脚初始化为上拉输入 } //按键延时 void delayms(u32 ms) { while(ms--); } /** * 函 数:按键获取键码 * 参 数:无 * 返 回 值:按下按键的键码值,范围:0~2,返回0代表没有按键按下 * 注意事项:此函数是阻塞式操作,当按键按住不放时,函数会卡住,直到按键松手 */ uint8_t Key_GetNum067(void) { uint8_t KeyNum = 0; //定义变量,默认键码值为0 if (GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_0) == 0) //读PB11输入寄存器的状态,如果为0,则代表按键2按下 { delayms(40); //延时消抖 while (GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_0) == 0); //等待按键松手 //Delay_ms(2); //延时消抖 KeyNum = 5; //置键码为2 } if (GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_6) == 0) //读PB1输入寄存器的状态,如果为0,则代表按键1按下 { delayms(40); //延时消抖 while (GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_6) == 0); //等待按键松手 //Delay_ms(2); //延时消抖 KeyNum = 6; //置键码为1 } return KeyNum; //返回键码值,如果没有按键按下,所有if都不成立,则键码为默认值0 }
主函数代码
int main(void) { int keyValue=8266; char key=0,mode=1; //位码初始化 smg_weima(); //段码初始化函数 smg_duanma(); //按键123 pa0 6 7初始化 Key_Init067(); //Usart1_Pin_Init(9600); while(1) { key =Key_GetNum067(); if(key==5) //key 1按下 { keyValue=0; mode=1; } if(key==6) //key 1按下 { keyValue=8266; mode=0; } if(mode==1) { smg_data(1,keyValue/1000); smg_data(2,keyValue/100%10); smg_data(3,keyValue/10%10); smg_data(4,keyValue%10); delay100(5000); if(keyValue ==1250) { keyValue=1200; } } if(mode==0) { smg_data(1,keyValue/1000); smg_data(2,keyValue/100%10); smg_data(3,keyValue/10%10); smg_data(4,keyValue%10); delay100(5000); keyValue++; if(keyValue ==1250) { keyValue=1200; } } } }
全部代码实现
#include "stm32f10x.h" // Device header #include "stdio.h" #include "string.h" void delay100(int xms) { while(xms--); } unsigned char code[] ={0xC0, 0x79,0x24, 0x30, 0x19, 0x12, 0x02, 0x78,0x00, 0x10, 0x08, 0x03, 0x46,0x21, 0x06, 0x0e};//共阳数码管 显示点 //段码初始化函数 #define G_GPIO_PIN GPIO_Pin_1 #define F_GPIO_PIN GPIO_Pin_2 #define E_GPIO_PIN GPIO_Pin_3 #define D_GPIO_PIN GPIO_Pin_4 #define C_GPIO_PIN GPIO_Pin_5 #define B_GPIO_PIN GPIO_Pin_6 #define A_GPIO_PIN GPIO_Pin_7 //段码初始化函数 void smg_duanma(void) { GPIO_InitTypeDef GPIO_InitStructure; //打开时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE); //推挽输出 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; GPIO_InitStructure.GPIO_Pin = A_GPIO_PIN | B_GPIO_PIN | C_GPIO_PIN | D_GPIO_PIN | E_GPIO_PIN | F_GPIO_PIN | G_GPIO_PIN ; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB,&GPIO_InitStructure); GPIO_SetBits(GPIOB, A_GPIO_PIN | B_GPIO_PIN | C_GPIO_PIN | D_GPIO_PIN | E_GPIO_PIN | F_GPIO_PIN | G_GPIO_PIN); } //段码显示函数 void smg_duanma_Display(GPIO_TypeDef* GPIOx,u8 val) { uint16_t display_val = val << 7; GPIO_Write(GPIOx,display_val); display_val =0xff; } //位码初始化 void smg_weima(void) { GPIO_InitTypeDef GPIO_InitStructure; //打开时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); //推挽输出 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1 | GPIO_Pin_3 | GPIO_Pin_2 | GPIO_Pin_4; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA,&GPIO_InitStructure); GPIO_SetBits(GPIOA, GPIO_Pin_1 | GPIO_Pin_3 | GPIO_Pin_2 | GPIO_Pin_4); } //数码管显示函数 void smg_data(char weizhi,char num) { switch(weizhi) { case 1 : GPIO_SetBits(GPIOA, GPIO_Pin_4); GPIO_ResetBits(GPIOA, GPIO_Pin_3); GPIO_ResetBits(GPIOA, GPIO_Pin_2); GPIO_ResetBits(GPIOA, GPIO_Pin_1); break; case 2 : GPIO_ResetBits(GPIOA, GPIO_Pin_4); GPIO_SetBits(GPIOA, GPIO_Pin_3); GPIO_ResetBits(GPIOA, GPIO_Pin_2); GPIO_ResetBits(GPIOA, GPIO_Pin_1); break; case 3 : GPIO_ResetBits(GPIOA, GPIO_Pin_4); GPIO_ResetBits(GPIOA, GPIO_Pin_3); GPIO_SetBits(GPIOA, GPIO_Pin_2); GPIO_ResetBits(GPIOA, GPIO_Pin_1); break; case 4 : GPIO_ResetBits(GPIOA, GPIO_Pin_4); GPIO_ResetBits(GPIOA, GPIO_Pin_3); GPIO_ResetBits(GPIOA, GPIO_Pin_2); GPIO_SetBits(GPIOA, GPIO_Pin_1); break; } /* #define G_GPIO_PIN GPIO_Pin_1 #define F_GPIO_PIN GPIO_Pin_2 #define E_GPIO_PIN GPIO_Pin_3 #define D_GPIO_PIN GPIO_Pin_4 #define C_GPIO_PIN GPIO_Pin_5 #define B_GPIO_PIN GPIO_Pin_6 #define A_GPIO_PIN GPIO_Pin_7 */ switch(num) { case 0 : //G不亮 给0亮 给1灭 GPIO_ResetBits(GPIOB, A_GPIO_PIN); GPIO_ResetBits(GPIOB, B_GPIO_PIN); GPIO_ResetBits(GPIOB, C_GPIO_PIN); GPIO_ResetBits(GPIOB, D_GPIO_PIN); GPIO_ResetBits(GPIOB, E_GPIO_PIN); GPIO_ResetBits(GPIOB, F_GPIO_PIN); GPIO_SetBits( GPIOB, G_GPIO_PIN); //smg_duanma_Display(GPIOB,code[0]); break; case 1 : //只有bc亮 给0亮 给1灭 GPIO_SetBits(GPIOB, A_GPIO_PIN); GPIO_ResetBits(GPIOB, B_GPIO_PIN); GPIO_ResetBits(GPIOB, C_GPIO_PIN); GPIO_SetBits(GPIOB, D_GPIO_PIN); GPIO_SetBits(GPIOB, E_GPIO_PIN); GPIO_SetBits(GPIOB, F_GPIO_PIN); GPIO_SetBits( GPIOB, G_GPIO_PIN); //smg_duanma_Display(GPIOB,code[1]); break; case 2 : //只有abdf亮 给0亮 给1灭 GPIO_ResetBits(GPIOB, A_GPIO_PIN); GPIO_ResetBits(GPIOB, B_GPIO_PIN); GPIO_SetBits(GPIOB, C_GPIO_PIN); GPIO_ResetBits(GPIOB, D_GPIO_PIN); GPIO_ResetBits(GPIOB, E_GPIO_PIN); GPIO_SetBits(GPIOB, F_GPIO_PIN); GPIO_ResetBits( GPIOB, G_GPIO_PIN); //smg_duanma_Display(GPIOB,code[1]); break; case 3 : //只有abcdg亮 给0亮 给1灭 GPIO_ResetBits(GPIOB, A_GPIO_PIN); GPIO_ResetBits(GPIOB, B_GPIO_PIN); GPIO_ResetBits(GPIOB, C_GPIO_PIN); GPIO_ResetBits(GPIOB, D_GPIO_PIN); GPIO_SetBits(GPIOB, E_GPIO_PIN); GPIO_SetBits(GPIOB, F_GPIO_PIN); GPIO_ResetBits( GPIOB, G_GPIO_PIN); //smg_duanma_Display(GPIOB,code[1]); break; case 4 : //只有bcfg亮 给0亮 给1灭 GPIO_SetBits(GPIOB, A_GPIO_PIN); GPIO_ResetBits(GPIOB, B_GPIO_PIN); GPIO_ResetBits(GPIOB, C_GPIO_PIN); GPIO_SetBits(GPIOB, D_GPIO_PIN); GPIO_SetBits(GPIOB, E_GPIO_PIN); GPIO_ResetBits(GPIOB, F_GPIO_PIN); GPIO_ResetBits( GPIOB, G_GPIO_PIN); //smg_duanma_Display(GPIOB,code[1]); break; case 5 : //只有acdfg亮 给0亮 给1灭 GPIO_ResetBits(GPIOB, A_GPIO_PIN); GPIO_SetBits(GPIOB, B_GPIO_PIN); GPIO_ResetBits(GPIOB, C_GPIO_PIN); GPIO_ResetBits(GPIOB, D_GPIO_PIN); GPIO_SetBits(GPIOB, E_GPIO_PIN); GPIO_ResetBits(GPIOB, F_GPIO_PIN); GPIO_ResetBits( GPIOB, G_GPIO_PIN); //smg_duanma_Display(GPIOB,code[1]); break; case 6 : //只有acdefg亮 给0亮 给1灭 GPIO_ResetBits(GPIOB, A_GPIO_PIN); GPIO_SetBits(GPIOB, B_GPIO_PIN); GPIO_ResetBits(GPIOB, C_GPIO_PIN); GPIO_ResetBits(GPIOB, D_GPIO_PIN); GPIO_ResetBits(GPIOB, E_GPIO_PIN); GPIO_ResetBits(GPIOB, F_GPIO_PIN); GPIO_ResetBits( GPIOB, G_GPIO_PIN); //smg_duanma_Display(GPIOB,code[1]); break; case 7 : //只有abc亮 给0亮 给1灭 GPIO_ResetBits(GPIOB, A_GPIO_PIN); GPIO_ResetBits(GPIOB, B_GPIO_PIN); GPIO_ResetBits(GPIOB, C_GPIO_PIN); GPIO_SetBits(GPIOB, D_GPIO_PIN); GPIO_SetBits(GPIOB, E_GPIO_PIN); GPIO_SetBits(GPIOB, F_GPIO_PIN); GPIO_SetBits(GPIOB, G_GPIO_PIN); //smg_duanma_Display(GPIOB,code[1]); break; case 8 : //只有abcdefg亮 给0亮 给1灭 GPIO_ResetBits(GPIOB, A_GPIO_PIN); GPIO_ResetBits(GPIOB, B_GPIO_PIN); GPIO_ResetBits(GPIOB, C_GPIO_PIN); GPIO_ResetBits(GPIOB, D_GPIO_PIN); GPIO_ResetBits(GPIOB, E_GPIO_PIN); GPIO_ResetBits(GPIOB, F_GPIO_PIN); GPIO_ResetBits( GPIOB, G_GPIO_PIN); //smg_duanma_Display(GPIOB,code[1]); break; case 9 : //只有abcdfg亮 给0亮 给1灭 GPIO_ResetBits(GPIOB, A_GPIO_PIN); GPIO_ResetBits(GPIOB, B_GPIO_PIN); GPIO_ResetBits(GPIOB, C_GPIO_PIN); GPIO_ResetBits(GPIOB, D_GPIO_PIN); GPIO_SetBits(GPIOB, E_GPIO_PIN); GPIO_ResetBits(GPIOB, F_GPIO_PIN); GPIO_ResetBits( GPIOB, G_GPIO_PIN); //smg_duanma_Display(GPIOB,code[1]); break; } delay100(200); GPIO_SetBits(GPIOB, A_GPIO_PIN | B_GPIO_PIN | C_GPIO_PIN | D_GPIO_PIN | E_GPIO_PIN | F_GPIO_PIN | G_GPIO_PIN ); GPIO_SetBits(GPIOA, GPIO_Pin_3|GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_4); } //按键123 pa0 6 7初始化 void Key_Init067(void) { GPIO_InitTypeDef GPIO_InitStructure; /*开启时钟*/ RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOB的时钟 /*GPIO初始化*/ GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 |GPIO_Pin_6 ;//|GPIO_Pin_7 ; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStructure); //将PB1和PB11引脚初始化为上拉输入 } //按键延时 void delayms(u32 ms) { while(ms--); } /** * 函 数:按键获取键码 * 参 数:无 * 返 回 值:按下按键的键码值,范围:0~2,返回0代表没有按键按下 * 注意事项:此函数是阻塞式操作,当按键按住不放时,函数会卡住,直到按键松手 */ uint8_t Key_GetNum067(void) { uint8_t KeyNum = 0; //定义变量,默认键码值为0 if (GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_0) == 0) //读PB11输入寄存器的状态,如果为0,则代表按键2按下 { delayms(40); //延时消抖 while (GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_0) == 0); //等待按键松手 //Delay_ms(2); //延时消抖 KeyNum = 5; //置键码为2 } if (GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_6) == 0) //读PB1输入寄存器的状态,如果为0,则代表按键1按下 { delayms(40); //延时消抖 while (GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_6) == 0); //等待按键松手 //Delay_ms(2); //延时消抖 KeyNum = 6; //置键码为1 } return KeyNum; //返回键码值,如果没有按键按下,所有if都不成立,则键码为默认值0 } int main(void) { int keyValue=8266; char key=0,mode=1; //位码初始化 smg_weima(); //段码初始化函数 smg_duanma(); //按键123 pa0 6 7初始化 Key_Init067(); //Usart1_Pin_Init(9600); while(1) { key =Key_GetNum067(); if(key==5) //key 1按下 { keyValue=0; mode=1; } if(key==6) //key 1按下 { keyValue=8266; mode=0; } if(mode==1) { smg_data(1,keyValue/1000); smg_data(2,keyValue/100%10); smg_data(3,keyValue/10%10); smg_data(4,keyValue%10); delay100(5000); if(keyValue ==1250) { keyValue=1200; } } if(mode==0) { smg_data(1,keyValue/1000); smg_data(2,keyValue/100%10); smg_data(3,keyValue/10%10); smg_data(4,keyValue%10); delay100(5000); keyValue++; if(keyValue ==1250) { keyValue=1200; } } } }
proteus 仿真图
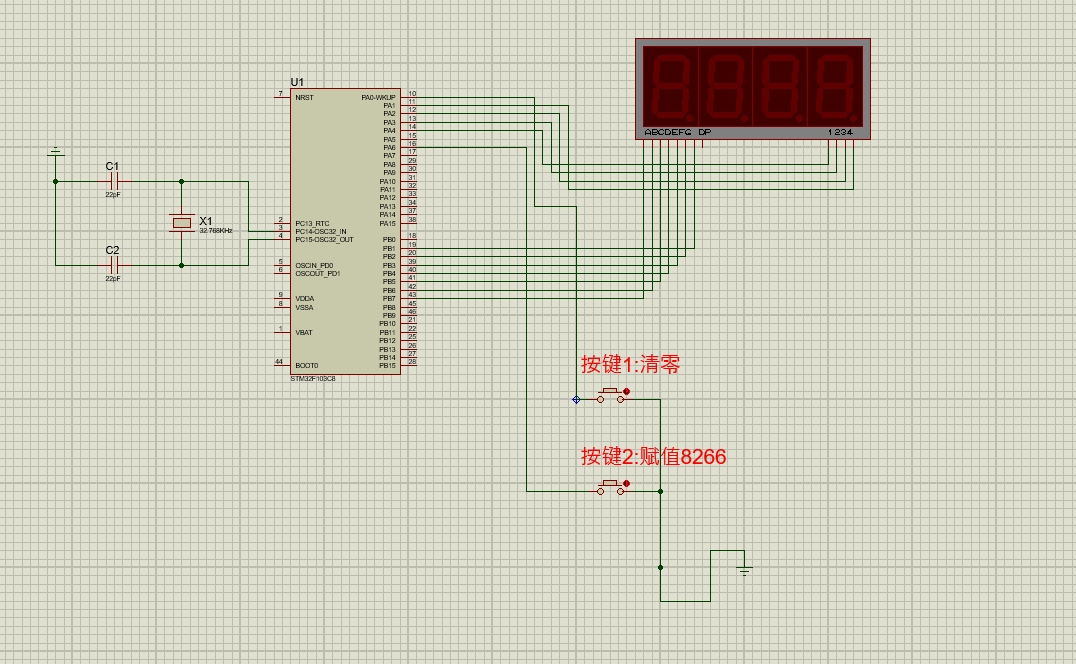
仿真效果图
源码获取+q群1034207608
绿衣捧研催题卷,红袖添香伴读书!

 浙公网安备 33010602011771号
浙公网安备 33010602011771号