OCS2::legged_robot::SwingTrajectoryPlanner_摆动腿轨迹规划
计算特定时间点指定腿的垂直速度约束
\(v_z=trajectory[index].velocity(time)\)
scalar_t SwingTrajectoryPlanner::getZvelocityConstraint(size_t leg, scalar_t time) const {
const auto index = lookup::findIndexInTimeArray(feetHeightTrajectoriesEvents_[leg], time);
return feetHeightTrajectories_[leg][index].velocity(time);
}
计算特定时间点指定腿的垂直位置约束
\(z=trajectory[index].position(time)\)
scalar_t SwingTrajectoryPlanner::getZpositionConstraint(size_t leg, scalar_t time) const {
const auto index = lookup::findIndexInTimeArray(feetHeightTrajectoriesEvents_[leg], time);
return feetHeightTrajectories_[leg][index].position(time);
}
根据模式和地形高度,更新所有腿的轨迹
void SwingTrajectoryPlanner::update(const ModeSchedule& modeSchedule, scalar_t terrainHeight) {
const scalar_array_t terrainHeightSequence(modeSchedule.modeSequence.size(), terrainHeight);
feet_array_t<scalar_array_t> liftOffHeightSequence;
liftOffHeightSequence.fill(terrainHeightSequence);
feet_array_t<scalar_array_t> touchDownHeightSequence;
touchDownHeightSequence.fill(terrainHeightSequence);
update(modeSchedule, liftOffHeightSequence, touchDownHeightSequence);
}
根据模式、升降高度和触地点高度,更新摆动和站立腿的轨迹
- 提取腿的接触标志数组
- 根据接触标志,生成每条腿的时间索引
- 使用三次样条(Cubic Spline)生成摆动轨迹
void SwingTrajectoryPlanner::update(const ModeSchedule& modeSchedule, const feet_array_t<scalar_array_t>& liftOffHeightSequence,
const feet_array_t<scalar_array_t>& touchDownHeightSequence) {
const auto& modeSequence = modeSchedule.modeSequence;
const auto& eventTimes = modeSchedule.eventTimes;
//获取四条腿的接触状态
const auto eesContactFlagStocks = extractContactFlags(modeSequence);
feet_array_t<std::vector<int>> startTimesIndices;
feet_array_t<std::vector<int>> finalTimesIndices;
for (size_t leg = 0; leg < numFeet_; leg++) {
std::tie(startTimesIndices[leg], finalTimesIndices[leg]) = updateFootSchedule(eesContactFlagStocks[leg]);
}
for (size_t j = 0; j < numFeet_; j++) {
feetHeightTrajectories_[j].clear();
feetHeightTrajectories_[j].reserve(modeSequence.size());
for (int p = 0; p < modeSequence.size(); ++p) {
if (!eesContactFlagStocks[j][p]) { // for a swing leg
const int swingStartIndex = startTimesIndices[j][p];
const int swingFinalIndex = finalTimesIndices[j][p];
checkThatIndicesAreValid(j, p, swingStartIndex, swingFinalIndex, modeSequence);
const scalar_t swingStartTime = eventTimes[swingStartIndex];
const scalar_t swingFinalTime = eventTimes[swingFinalIndex];
const scalar_t scaling = swingTrajectoryScaling(swingStartTime, swingFinalTime, config_.swingTimeScale);
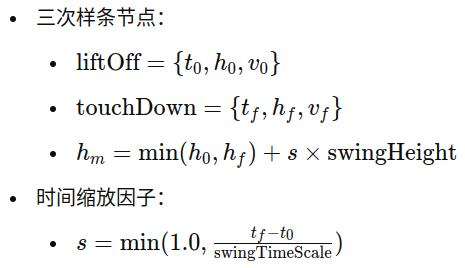
const CubicSpline::Node liftOff{swingStartTime, liftOffHeightSequence[j][p], scaling * config_.liftOffVelocity};
const CubicSpline::Node touchDown{swingFinalTime, touchDownHeightSequence[j][p], scaling * config_.touchDownVelocity};
const scalar_t midHeight = std::min(liftOffHeightSequence[j][p], touchDownHeightSequence[j][p]) + scaling * config_.swingHeight;
feetHeightTrajectories_[j].emplace_back(liftOff, midHeight, touchDown);
} else { // for a stance leg
// Note: setting the time here arbitrarily to 0.0 -> 1.0 makes the assert in CubicSpline fail
const CubicSpline::Node liftOff{0.0, liftOffHeightSequence[j][p], 0.0};
const CubicSpline::Node touchDown{1.0, liftOffHeightSequence[j][p], 0.0};
feetHeightTrajectories_[j].emplace_back(liftOff, liftOffHeightSequence[j][p], touchDown);
}
}
feetHeightTrajectoriesEvents_[j] = eventTimes;
}
}
基于接触标志确定摆动腿的开始和结束时间索引
- 对于非接触阶段,找到最近的接触阶段时间索引作为开始时间
- 找到后续接触阶段的前一个时间点作为结束时间
std::pair<std::vector<int>, std::vector<int>> SwingTrajectoryPlanner::updateFootSchedule(const std::vector<bool>& contactFlagStock) {
const size_t numPhases = contactFlagStock.size();
std::vector<int> startTimeIndexStock(numPhases, 0);
std::vector<int> finalTimeIndexStock(numPhases, 0);
// find the startTime and finalTime indices for swing feet
for (size_t i = 0; i < numPhases; i++) {
if (!contactFlagStock[i]) {
std::tie(startTimeIndexStock[i], finalTimeIndexStock[i]) = findIndex(i, contactFlagStock);
}
}
return {startTimeIndexStock, finalTimeIndexStock};
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号