强化学习理论-第5课-蒙特卡洛方法
之前的章节都是基于model base,这节是model free的方法。
1. model-base to model-free:
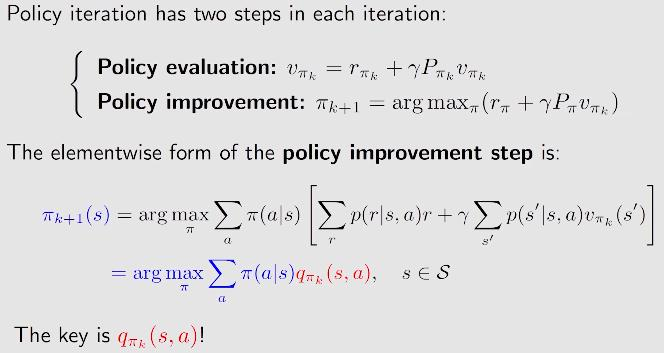
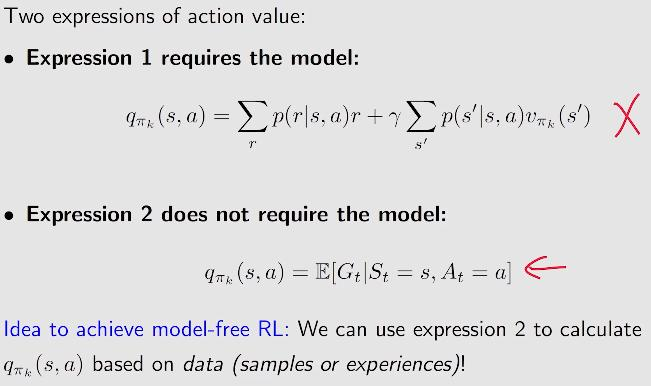
2. 计算\(q_{\pi k}:\)
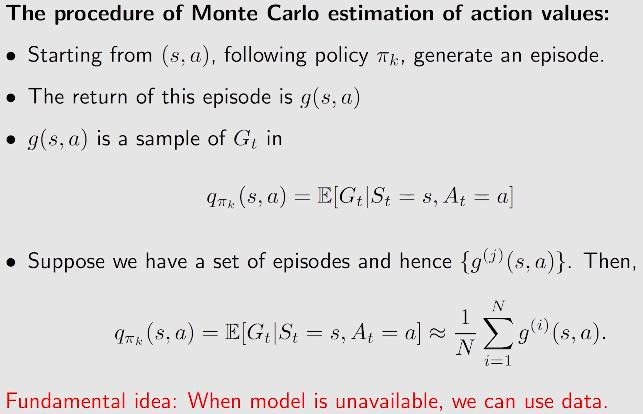
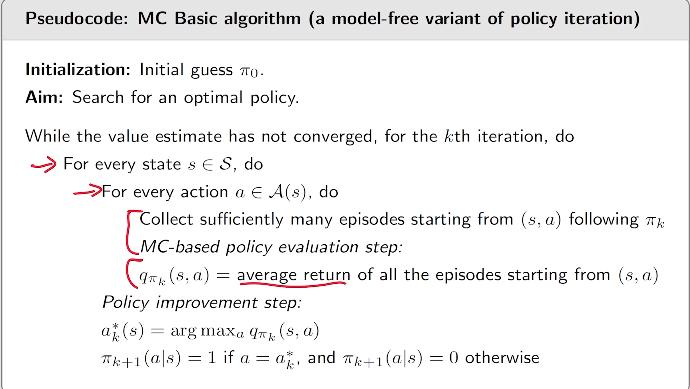
3. MC base algorithm:
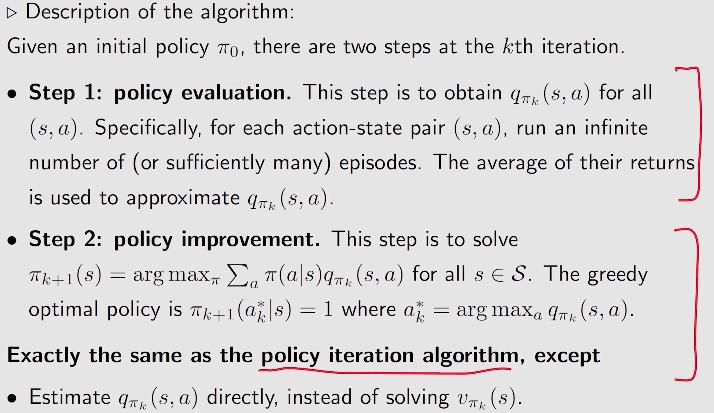
step 1和model base是不一样的,后面的步骤是一样的。
4. MC exploring starts算法:
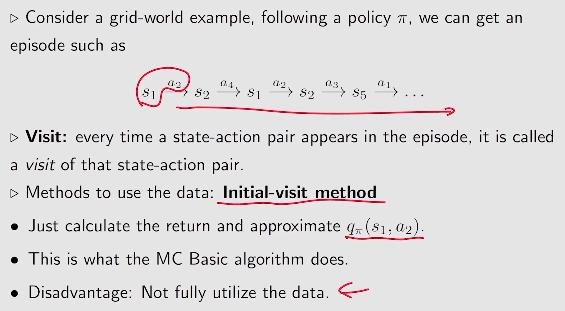
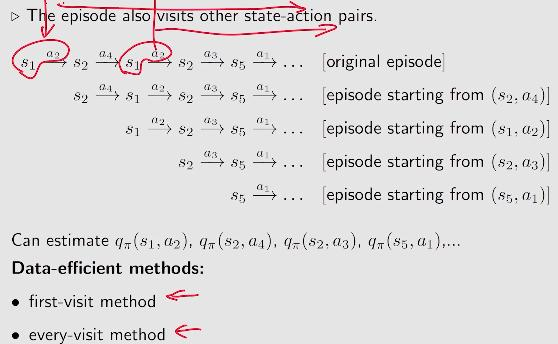
提出visit概念,MC Basic的算法只考虑第一个visit,对数据的使用是浪费的。
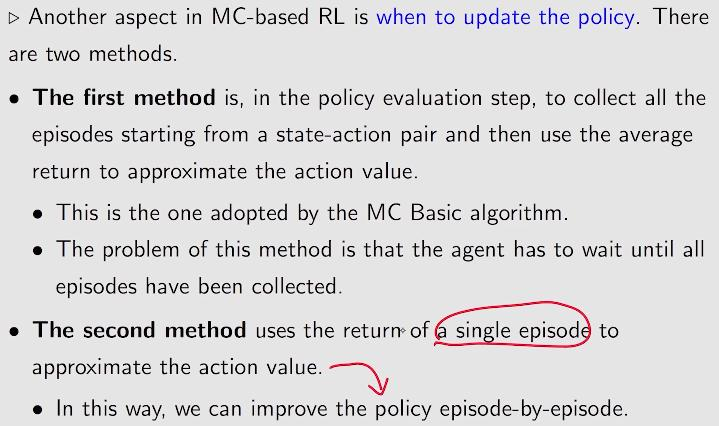
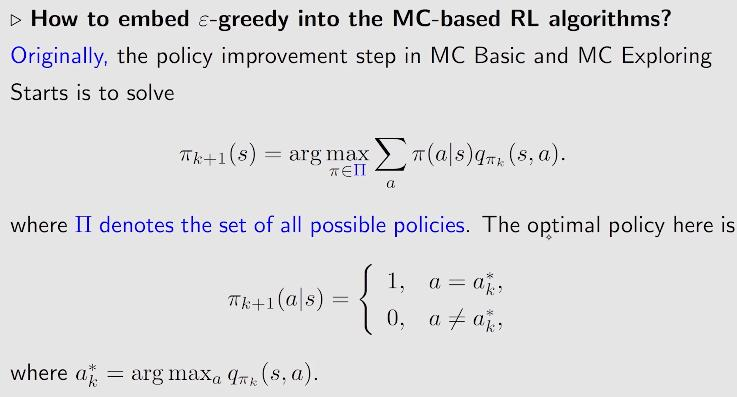
4.1 update the policy:
第一种方案是收集到所有的episodes,然后再计算;另一种是获得一个episode,计算近似值,改进策略
4.2 MC exploring starts:

在实际当中,获取所有的(s,a)是比较困难的,所以有下面的改进策略。
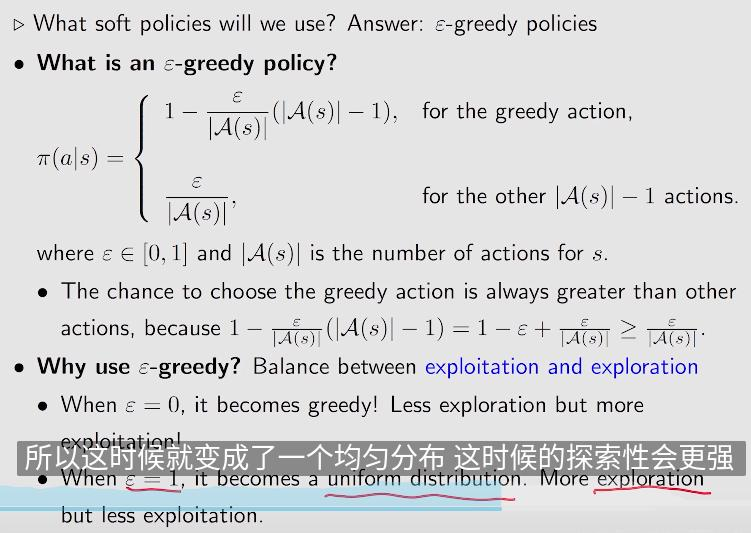
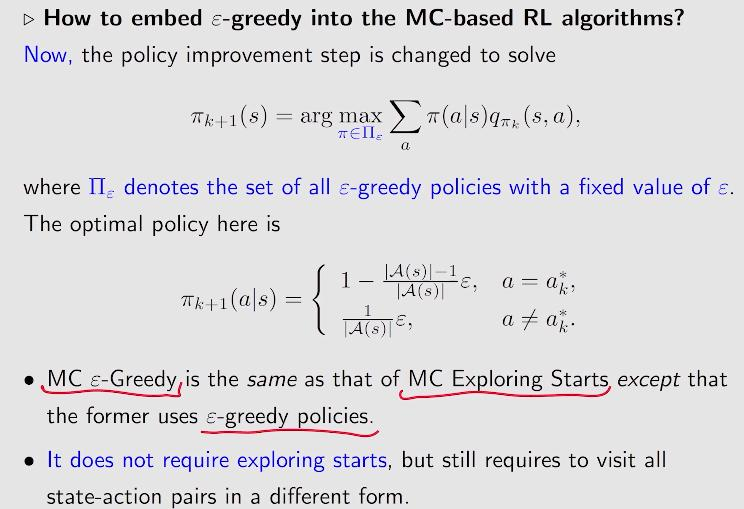
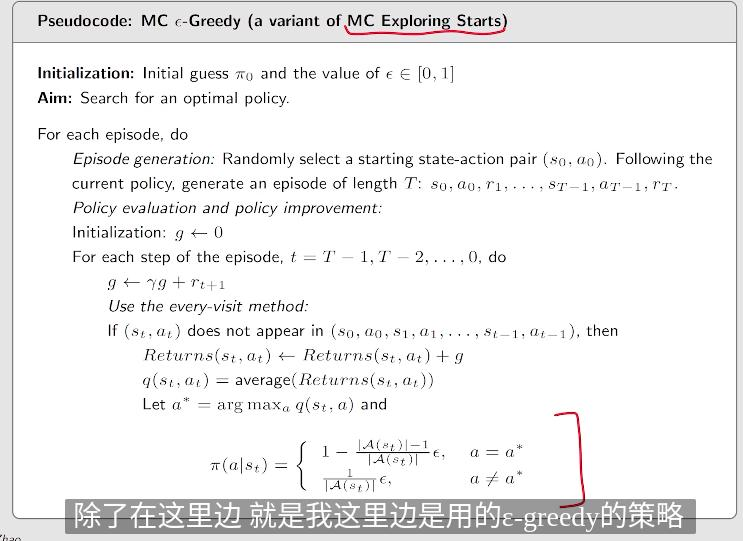
5. MC Epsilon-Greedy:
A policy is called soft if the probability to take any action is positive.
def mc_basic(self, length = 30, epochs = 10):
for epoch in range(epochs):
for state in range(self.state_space_size):
for action in range(self.action_space_size):
episode = self.obtain_episode(self.policy, state, action, length)
g = 0
for step in range(len(episode)-1, -1, -1):
g = episode[step]['reward'] + self.gama * g
self.qvalue[state][action] = g
qvalue_star = self.qvalue[state].max()
action_star = self.qvalue[state].tolist().index(qvalue_star)
self.policy[state] = np.zeros(shape = self.action_space_size)
self.policy[state,action_star] = 1
def mc_exploring_starts(self, length = 10):
policy = self.mean_policy.copy()
qvalue = self.qvalue.copy()
returns = [[[0 for row in range(1)] for col in range(5)] for block in range(25)]
while np.linalg.norm(policy - self.policy, ord = 1) > 0.001:
policy = self.policy.copy()
for state in range(self.state_space_size):
for action in range(self.action_space_size):
visit_list = []
g = 0
episode = self.obtain_episode(policy=self.policy, start_state=state, start_action=action,
length=length)
for step in range(len(episode) - 1, -1, -1):
reward = episode[step]['reward']
state = episode[step]['state']
action = episode[step]['action']
g = self.gama * g + reward
if [state, action] not in visit_list:
visit_list.append([state, action])
returns[state][action].append(g)
qvalue[state, action] = np.array(returns[state][action]).mean()
qvalue_star = qvalue[state].max()
action_star = qvalue[state].tolist().index(qvalue_star)
self.policy[state] = np.zeros(shape = self.action_space_size).copy()
self.policy[state, action_star] = 1
def mc_epsilon_greedy(self, length = 10, epsilon=0):
policy = self.mean_policy.copy()
qvalue = self.qvalue.copy()
returns = [[[0 for row in range(1)] for col in range(5)] for block in range(25)]
while np.linalg.norm(policy - self.policy, ord = 1) > 0.001:
policy = self.policy.copy()
for state in range(self.state_space_size):
for action in range(self.action_space_size):
visit_list = []
g = 0
episode = self.obtain_episode(policy=self.policy, start_state=state, start_action=action,
length=length)
for step in range(len(episode) - 1, -1, -1):
reward = episode[step]['reward']
state = episode[step]['state']
action = episode[step]['action']
g = self.gama * g + reward
if [state, action] not in visit_list:
visit_list.append([state, action])
returns[state][action].append(g)
qvalue[state, action] = np.array(returns[state][action]).mean()
qvalue_star = qvalue[state].max()
action_star = qvalue[state].tolist().index(qvalue_star)
for a in range(self.action_space_size):
if a == action_star:
self.policy[state, a] = 1 - (
self.action_space_size - 1) / self.action_space_size * epsilon
else:
self.policy[state, a] = 1 / self.action_space_size * epsilon

 浙公网安备 33010602011771号
浙公网安备 33010602011771号