强化学习理论-第4课-值迭代与策略迭代
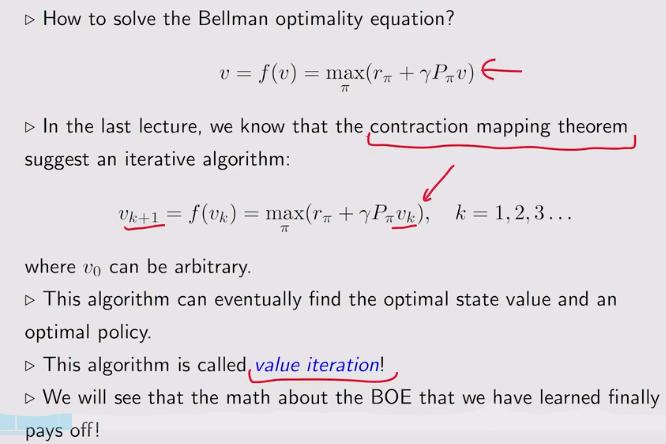
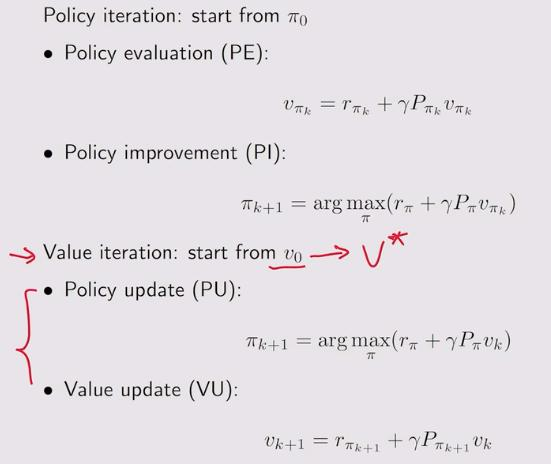
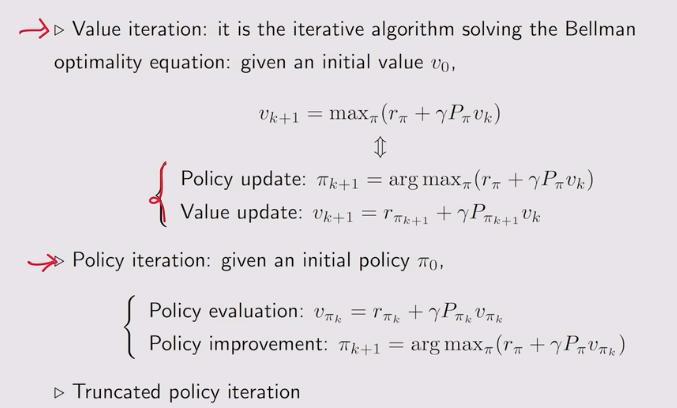
1. value iteration algorithm:
值迭代上一节已经介绍过:
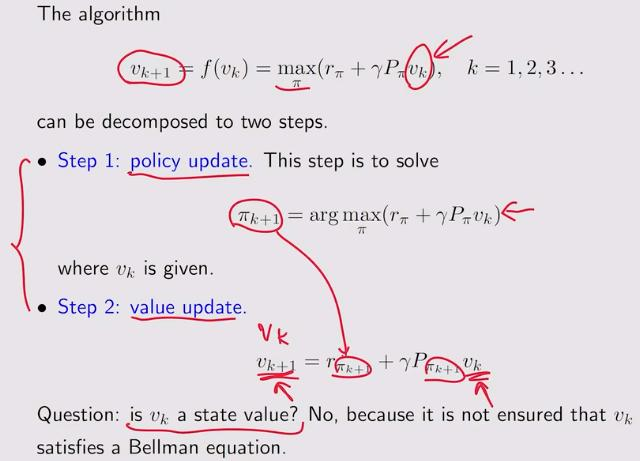
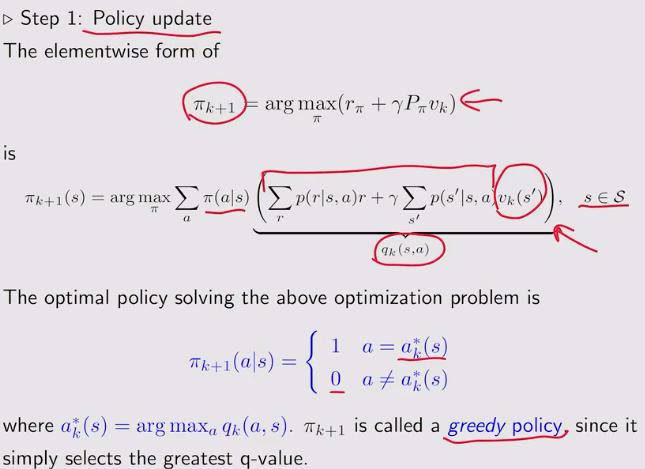
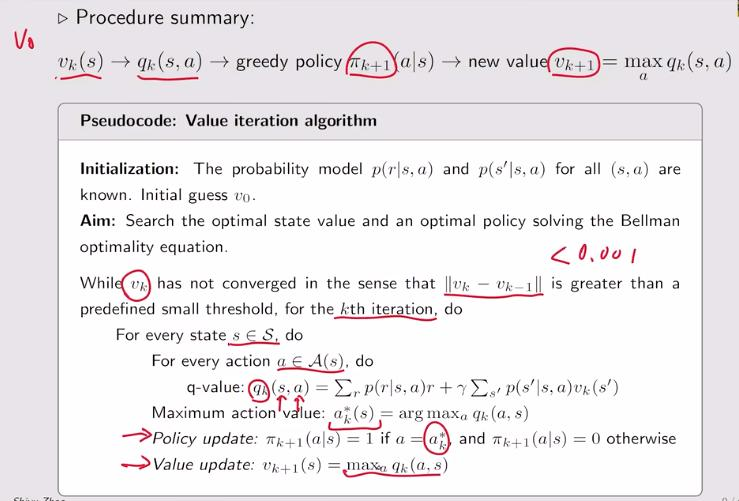
1.1 policy update:
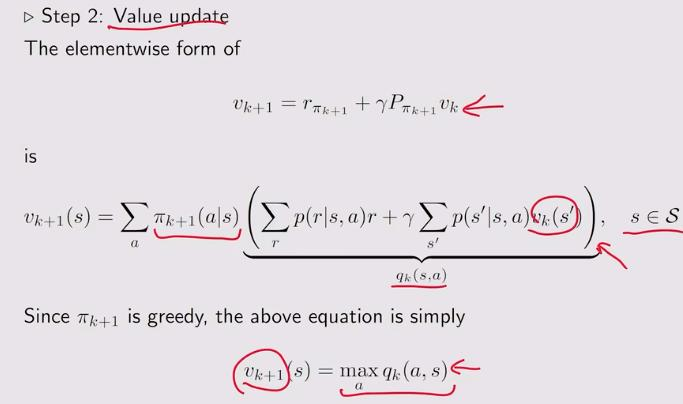
1.2 Value update:
此时,\(\pi_{k+1}\)和\(v_k\)都是已知的
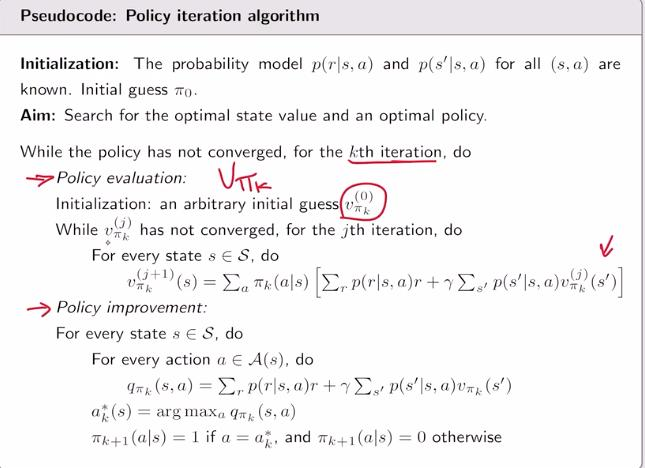
1.3 procedure summary:
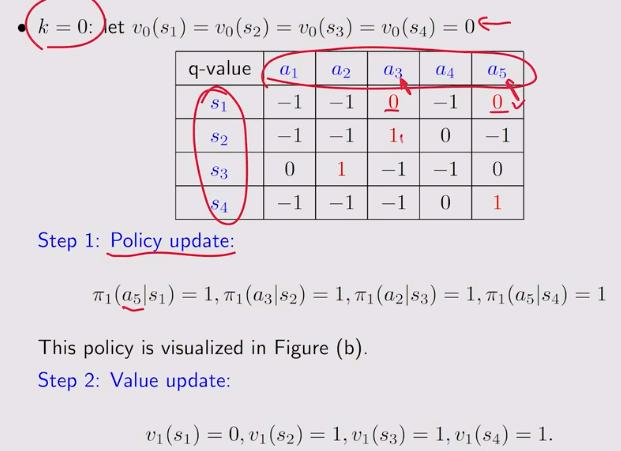
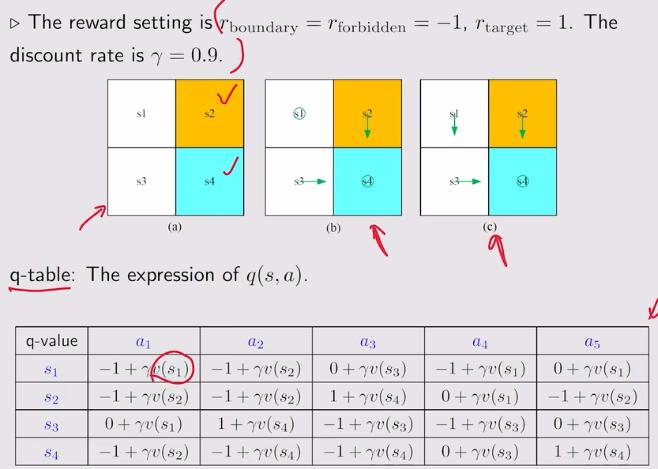
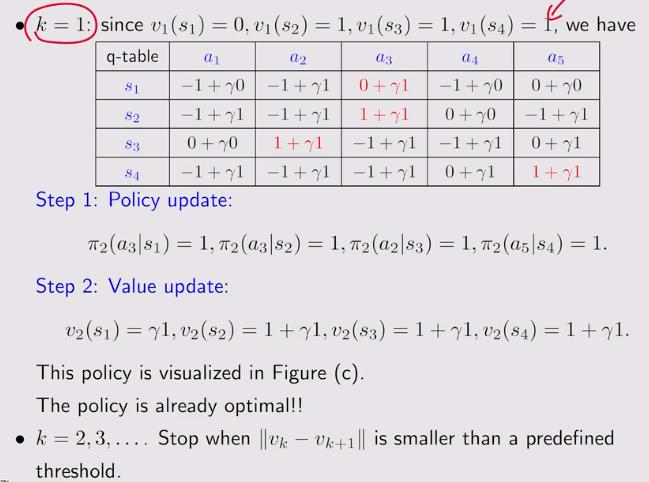
1.4 example:
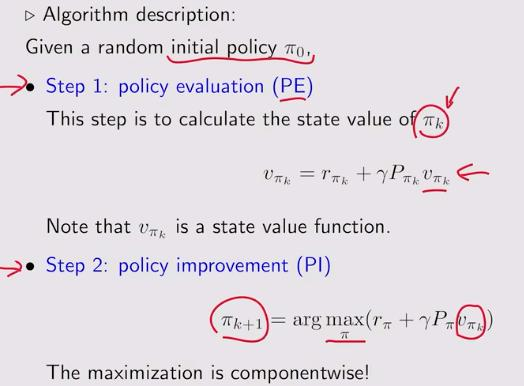
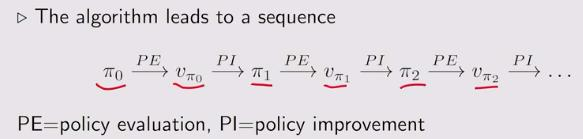
2. policy iteration algorithm:
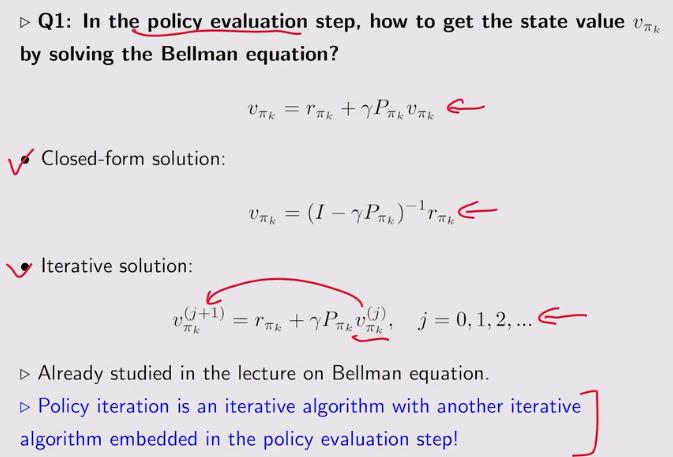
Q1:
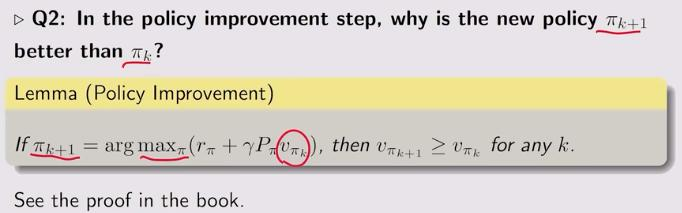
Q2:
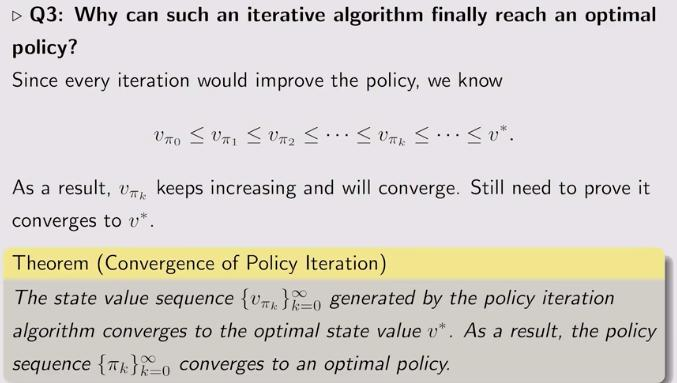
Q3:
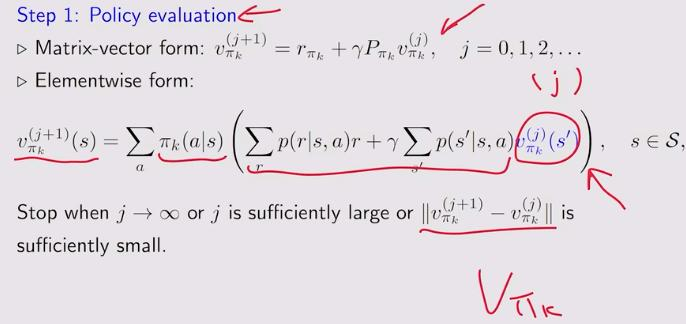
2.1 Policy evaluation:
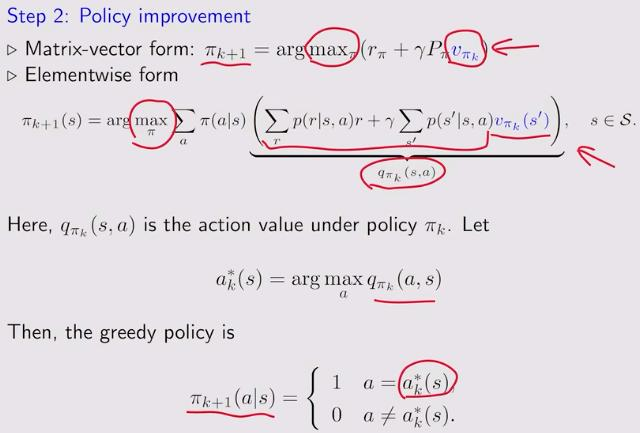
2.2 Policy improvement:
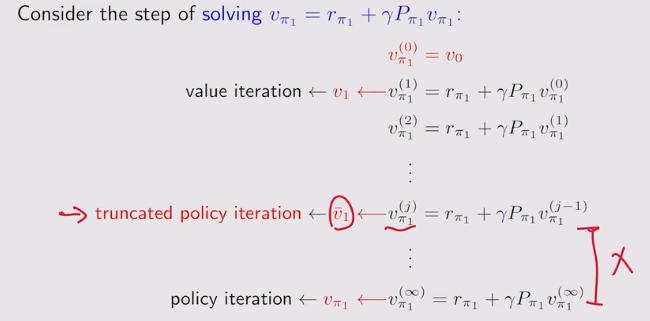
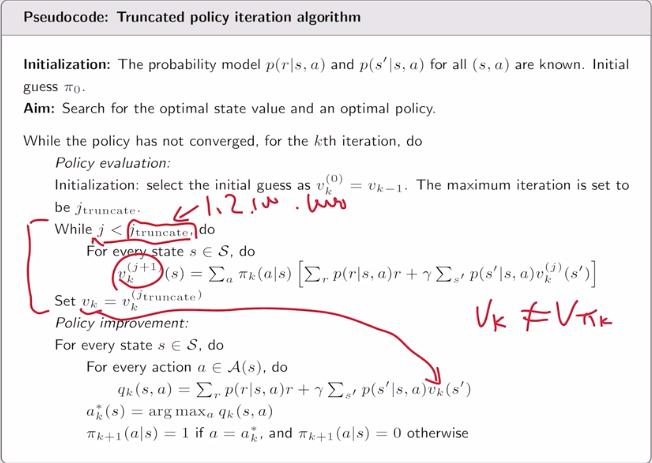
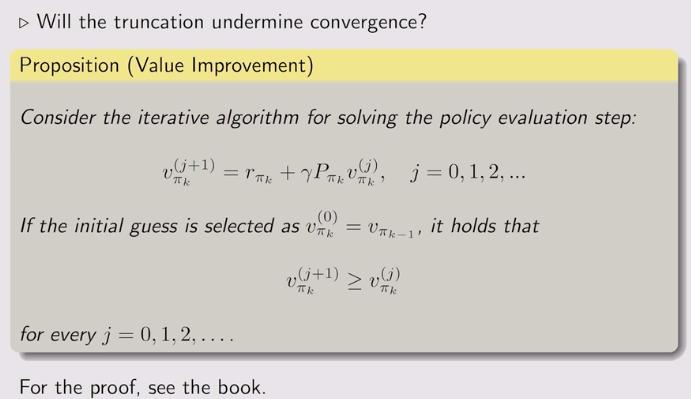
3. truncated policy iteration algorithm
3.1 compare value iteration and policy iteration:
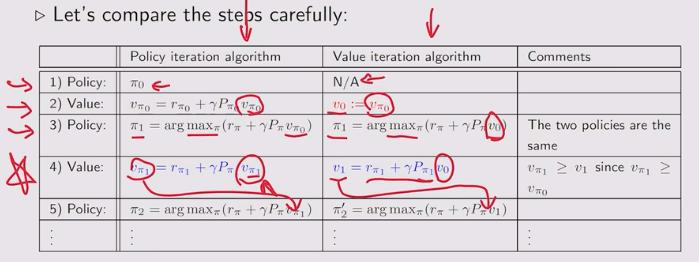
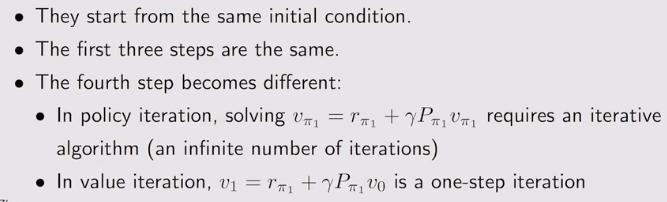
计算一步是value interation,计算无穷多步,就是policy iteration。中间截断一步,就叫做truncated policy iteration
3.2 pseudocode:
4. summary:
def random_greed_policy(self):
"""
生成随机的greedy策略
:return:
"""
policy = np.zeros(shape=(self.state_space_size, self.action_space_size))
for state_index in range(self.state_space_size):
action = np.random.choice(range(self.action_space_size))
policy[state_index, action] = 1
return policy
def policy_evaluation(self, policy, tolerance=0.001, steps=10):
"""
迭代求解贝尔曼公式 得到 state value tolerance 和 steps 满足其一即可
:param policy: 需要求解的policy
:param tolerance: 当 前后 state_value 的范数小于tolerance 则认为state_value 已经收敛
:param steps: 当迭代次数大于step时 停止计算 此时若是policy iteration 则算法变为 truncated iteration
:return: 求解之后的收敛值
"""
state_value_k = np.ones(self.state_space_size)
state_value = np.zeros(self.state_space_size)
while np.linalg.norm(state_value_k - state_value, ord=1) > tolerance:
state_value = state_value_k.copy()
for state in range(self.state_space_size):
value = 0
for action in range(self.action_space_size):
value += policy[state, action] * self.calculate_qvalue(state_value=state_value_k.copy(),
state=state,
action=action) # bootstrapping
state_value_k[state] = value
return state_value_k
def policy_improvement(self, state_value):
"""
是普通 policy_improvement 的变种 相当于是值迭代算法 也可以 供策略迭代使用 做策略迭代时不需要 接收第二个返回值
更新 qvalue ;qvalue[state,action]=reward+value[next_state]
找到 state 处的 action*:action* = arg max(qvalue[state,action]) 即最优action即最大qvalue对应的action
更新 policy :将 action*的概率设为1 其他action的概率设为0 这是一个greedy policy
:param: state_value: policy对应的state value
:return: improved policy, 以及迭代下一步的state_value
"""
policy = np.zeros(shape=(self.state_space_size, self.action_space_size))
state_value_k = state_value.copy()
for state in range(self.state_space_size):
qvalue_list = []
for action in range(self.action_space_size):
qvalue_list.append(self.calculate_qvalue(state, action, state_value.copy()))
state_value_k[state] = max(qvalue_list)
action_star = qvalue_list.index(max(qvalue_list))
policy[state, action_star] = 1
return policy, state_value_k
def calculate_qvalue(self, state, action, state_value):
"""
计算qvalue elementwise形式
:param state: 对应的state
:param action: 对应的action
:param state_value: 状态值
:return: 计算出的结果
"""
qvalue = 0
for i in range(self.reward_space_size):
qvalue += self.reward_list[i] * self.env.Rsa[state, action, i]
for next_state in range(self.state_space_size):
qvalue += self.gama * self.env.Psa[state, action, next_state] * state_value[next_state]
return qvalue
def value_iteration(self, tolerance=0.001, steps=100):
"""
迭代求解最优贝尔曼公式 得到 最优state value tolerance 和 steps 满足其一即可
:param tolerance: 当 前后 state_value 的范数小于tolerance 则认为state_value 已经收敛
:param steps: 当迭代次数大于step时 停止 建议将此变量设置大一些
:return: 剩余迭代次数
"""
state_value_k = np.ones(self.state_space_size)
while np.linalg.norm(state_value_k - self.state_value, ord=1) > tolerance and steps > 0:
steps -= 1
self.state_value = state_value_k.copy()
self.policy, state_value_k = self.policy_improvement(state_value_k.copy())
return steps
def policy_iteration(self, tolerance=0.001, steps=100):
"""
:param tolerance: 迭代前后policy的范数小于tolerance 则认为已经收敛
:param steps: step 小的时候就退化成了 truncated iteration
:return: 剩余迭代次数
"""
policy = self.random_greed_policy()
while np.linalg.norm(policy - self.policy, ord=1) > tolerance and steps > 0:
steps -= 1
policy = self.policy.copy()
self.state_value = self.policy_evaluation(self.policy.copy(), tolerance, steps)
self.policy, _ = self.policy_improvement(self.state_value)
return steps

 浙公网安备 33010602011771号
浙公网安备 33010602011771号