Dynamic Locomotion in the MIT Cheetah 3 Through Convex Model-Predictive Control
1. Swing Leg Control


\(J_i \in R^{3*3}\) 是足端雅可比;\(\tau _{i,ff}\) 是前馈力矩
\(\Lambda \in R^{3*3}\)是操作空间惯性矩阵;\(a_{i,ref} \in R^{3*3}\)是机体坐标系下的参考加速度
q是关节角度;\(C_i \dot{q}_i + G_i\)是科里奥利力和重力
2. Ground Force Control
\(\tau_i = J_i^T R_i^T f_i\)
\(R^T\)世界坐标转机体坐标;\(J_i \in R^{3*3}\) 是足端雅可比;f是MPC求出的接触力
3. 单刚体动力学:
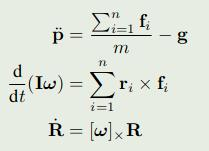
3.1 角速度近似
机体到世界坐标的转换:\(R = R_z(\psi) R_y(\theta) R_x(\phi)\)
\(\psi\):yaw;
\(\theta\): pitch;
\(\phi\): roll
考虑pitch和roll都比较小,近似为0处理:
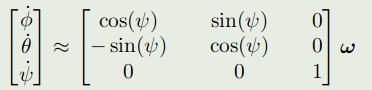
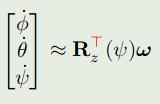
这里注意欧拉角的先后顺序。
3.2 角惯性近似:

小角速度的时候,第二项很小,不考虑
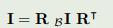
考虑比较小的roll和pitch,不考虑

4.简化的动力学:
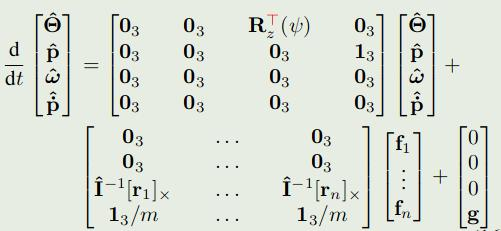
可以写成:\(\dot{x}(t) = A_c(\psi)x(t) + B_c(r_1, ...,r_n, \psi) u(t)\)
5.线性离散:
将\(B_c\)在参考轨迹下的\(\psi, r_i\)进行近似展开,\(A\)在参考轨迹下的\(\psi\)近似展开。
下面给出一个例子:

简单的解释:
下一时刻位置 = 当前位置 + 速度 * t + 1/2 * 加速度 * \(t^2\)
速度 = 当前速度 + 当前加速度 * t + 输入加速度 * t
6. MPC



 浙公网安备 33010602011771号
浙公网安备 33010602011771号