Houdini Volume Deform 奇 思
最近在做Houdini Volume的一些结算,工作的过程中突然闪现一个想法,可不可以把Houdini 中 Point Deform 节点的原理和算法运用到Volume上 ? 经过测试, 发现是可以的。
Point Deform 是根据 模型的变形(Geometry Deform) 来改变点的位置。利用模型的变形的好处是:模型本身的点相对少,内存占用少些,效率更高。Volume Deform 运用Point Deform相同的原理,利用模型变形的信息的话,会继承它的这些优点。
在这之前想说的是,还有很多Volume Deform的方法,这里只是提供另一个思路~
测试的Demo如下:
这题的框架如下图:
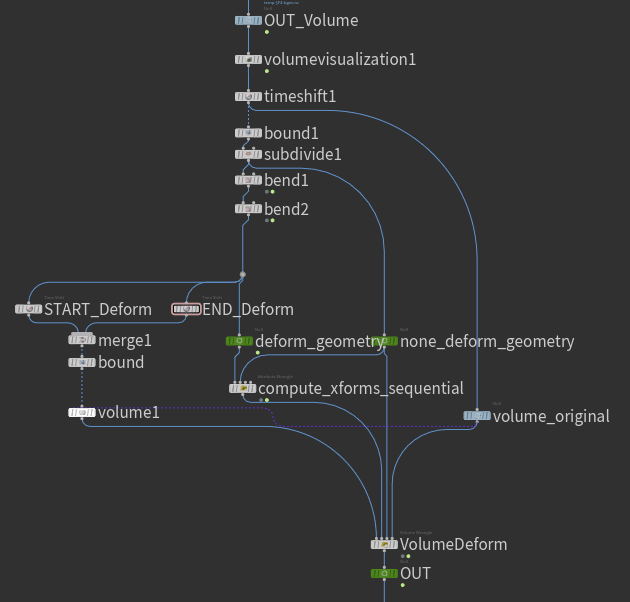
其中compute_xforms_sequential是Point Deform节点中对应的相应节点,注意的是我测试用的Houdini版本是16。目前houdini 18的话,Point Deform会:如果模型中(第二个端口)存在id属性,会优先使用id,而不是ptnum(点号)。
上图中VolumeDeform的参数和代码整合如下:
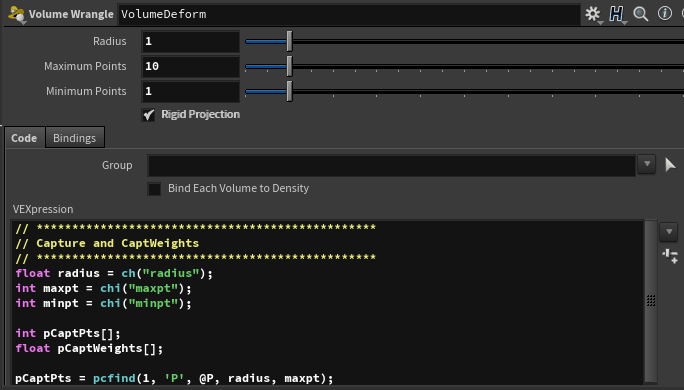
// vex


// ************************************************ // Capture and CaptWeights // ************************************************ float radius = ch("radius"); int maxpt = chi("maxpt"); int minpt = chi("minpt"); int pCaptPts[]; float pCaptWeights[]; pCaptPts = pcfind(1, 'P', @P, radius, maxpt); if (len(pCaptPts) < minpt) { pCaptPts = pcfind(1, 'P', @P, 1e15, minpt); radius = 1.1 * distance(@P, point(1, 'P', pCaptPts[-1])); } foreach (int pt; pCaptPts) { float r2 = distance2( vector(point(1, 'P', pt)), @P ); r2 /= radius*radius; float weight = 1-r2; weight *= weight; //weight = 1-weight; push(pCaptWeights, weight); } // ************************************************ // Compute Offset //************************************************* float totalweight = 0; vector delta = 0; matrix3 totalxform = 0; vector offset; foreach (int idx; int pt; pCaptPts) { vector oldcenter = point(1, 'P', pt); vector diff = point(2, 'P', pt) - oldcenter; matrix3 xform = point(1, 'xform', pt); float weight = pCaptWeights[idx]; // Compute our new location according this xform. vector newp = @P; newp -= oldcenter; newp *= xform; newp += oldcenter; newp += diff; diff = newp - @P; delta += diff * weight; totalweight += weight; totalxform += xform * weight; } delta /= totalweight; //@P += delta; offset = delta; if (totalweight > 0) { totalxform /= totalweight; if (chi("rigidprojection")) totalxform = polardecomp(totalxform); } // ************************************************ //Deform // ************************************************ f@density = volumesample(3,0,@P + offset);
另外的思路
//利用 Tetrahedral Mesh 来Deform Volume,在Applied Houdini - Volumes VI 中学的新思路
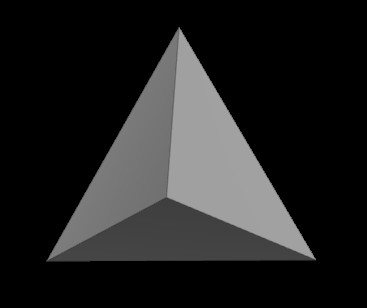
主要是利用了tetrahedral mesh的一个特性,tetrahedral mesh是由一个个四面体组成的,而且是实体的四面体,基本结构如下图:
tetrahedral mesh 很重要的一个特性 ,是用xyzdist 函数时, 比如
int prim; vector uvw; xyzdist(1,@P,prim,uvw); v@pos = primuv(1,"P",prim,uvw);
使用xyzdist采样第二个接口的tetrahedral mesh时, 如果这个点在tetrahedral mesh的体积内,最终的pos其实就是当前点的位置 即 @pos等于@P;如果在tetrahedral mesh的体积外,位置就有误差了。这也侧面解释了,如果对tetrahedral mesh变形用力过大,比如组成它的某个四面体,如下变形(翻转了,1点本来在2、3点的左边,后来跑右面了)
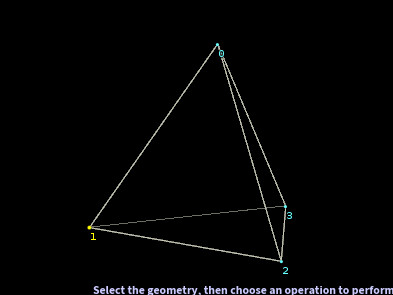
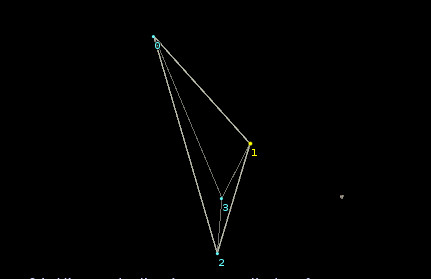
这种变形过大的情况会造成Volume Deform的误差。
利用这个特性,完全可以先变形tetrahedral mesh,然后利用primuv得到点在变形后的tet mesh的prim和uvw,再根据prim,uvw得到点在原始的tet mesh中的位置信息,最后用得到的位置信息采样原始的Volume,结构如下图
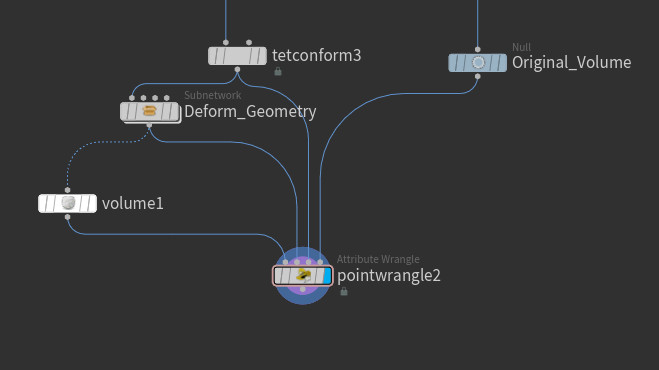
pointwrangle2中的代码如下:
int prim; vector uvw; float dist = xyzdist(1,@P,prim,uvw); vector origP = primuv(2,"P",prim,uvw); @density = volumesample(3,"density",origP);

 浙公网安备 33010602011771号
浙公网安备 33010602011771号