求解三角系统-从理论到代码优化
理论
在求解n维线性系统 \(Ax=b\) ,我们通常将因子\(A\)分解为两个三角矩阵,即 \(A=LU\) :
- \(L\) 是下三角,其中 \(L=[l_{i,j}]\) , 并满足当\(j>i\) 时,\(l_{i,j}=0\) 和 \(l_{i,i}=1\) 。
- \(U\) 是上三角,其中 \(U=[u_{i,j}]\) ,且当 \(i>j\) 时, \(u_{i,j}=0\) 。
从而使得求解 \(Ax=b\) ,变成了求解 \(L(Ux)=b\) :
- 正向替换为: \(Ly=b\) 。
- 反向替换为: \(Ux=y\) 。
直接求解 \(A\) 的复杂度为 \(O(n^3)\) ,但是求解三角系统的复杂度为 \(O(n^2)\) 。
推导正向替换
由公式 \(Ly=b\) 展开可得:
求出对角元素:
公式和算法
由上面推到过程可得,对于 \(k=1,2,...,n\) :
伪代码算法实现:
for k from 1 to n do:
y[k]=b[k];
for i from 1 to k-1 do:
y[k]=y[k]-l[k][i]*y[i];
反向替换过程类似
代码实现和优化
准备
编译器
- MSVC2019
原始代码
根据上文中的公式,可以很快写出C语言代码如下:
void solve_triangular_system_swapped( int n, double **L, double *b, double *y ){
for(int i=0;i<n;++i){
y[i]=b[i];
for(int j=0;j<i;++j){
y[i]=y[i]-y[j]*L[i][j];
}
}
}
Pipeline 优化
三种典型的Pipeline:
- 加速多条指令。
- 加速单条指令。
- 接续指令流水(指将计算机指令处理过程拆分为多个步骤,并通过多个硬件处理单元并行执行来加快指令执行速度)。
第三种Pipline,通常情况下每个指令长度不一。
对算法进行Pipeline分析
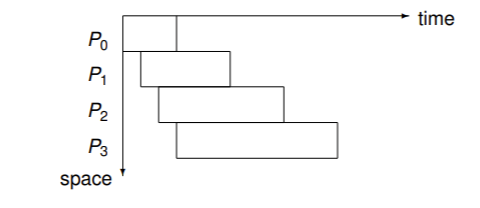
传统指令Pipeline
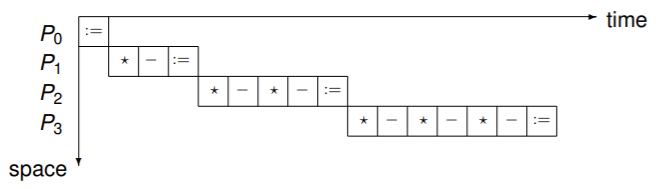
第三种Pipeline
使 \(y_1\) 在下一个流水中可用:
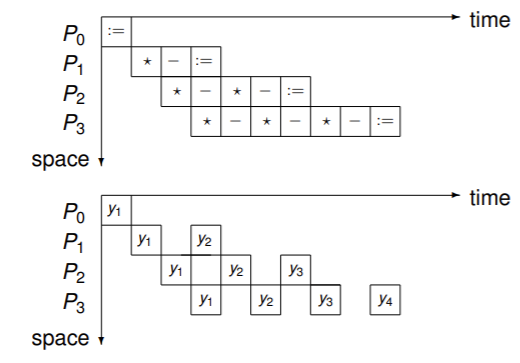
因此我们需要重写算法和公式
以 \(Ly=b\) 前五步为例:
-
\(y:=b\)
-
\(\begin{array}{l} y_2:=y_2-l_{2,1}*y_1;\\ y_3:=y_3-l_{3,1}*y_1;\\ y_4:=y_4-l_{4,1}*y_1;\\ y_5:=y_5-l_{5,1}*y_1;\\ \end{array}\)
-
\(\begin{array}{l} y_3:=y_3-l_{3,2}*y_2;\\ y_4:=y_4-l_{4,2}*y_2;\\ y_5:=y_5-l_{5,2}*y_2; \end{array}\)
-
\(\begin{array}{l} y_4:=y_4-l_{4,3}*y_3;\\ y_5:=y_5-l_{5,3}*y_3; \end{array}\)
即:
y:=b;
for i from 2 to n do
for j from i to n do
y_j=y_j-l[j,i-1]*y_{i-1};
由伪代码可写C语言代码:
void solve_triangular_system_swapped( int n, double **L, double *b, double *y )
{
for(int i=0; i<n; i++) y[i] = b[i];
for(int i=1; i<n; i++)
{
for(int j=i; j<n; j++)
y[j] = y[j] - L[j][i-1]*y[i-1];
}
}
优化结果
VC++编译优化参数为\Od
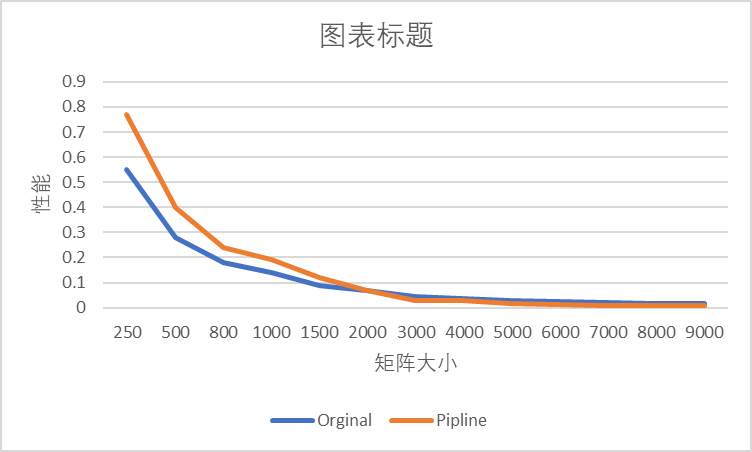
总结
- 使用Pipline可以在矩阵规模较小时,带来性能上的提升。
- 矩阵规模增大时(本机为2000),由于代码非缓存友好代码,性能将比原始代码要差。
Unroll
使用循环展开对程序的性能进行优化也是常用的手段。循环展开层数取决于CPU逻辑寄存器的数量。因为Pipline在处理大矩阵时,性能较差,其次在\O1 优化的情况下原始代码有着和Pipline优化后相仿的性能,因此这里只对原始代码进行Unroll。
int j = 0, i = 0;
for (i = 0; i < n; ++i) {
y[i] = b[i];
for (j = 0; j < i; j += 4) {
y[i] = y[i] - y[j] * L[i][j];
y[i] = y[i] - y[j + 1] * L[i][j + 1];
y[i] = y[i] - y[j + 2] * L[i][j + 2];
y[i] = y[i] - y[j + 3] * L[i][j + 3];
}
for (; j < i; j++) {
y[i] = y[i] - y[j] * L[i][j];
}
}
优化结果
VC++编译优化参数为\O1
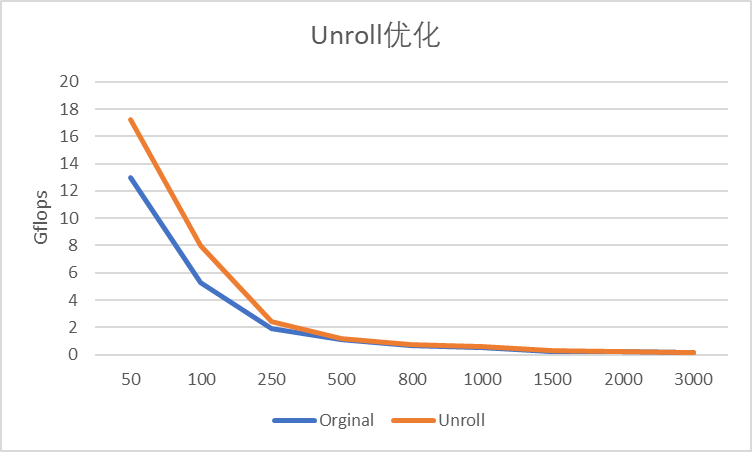
结论
- 当矩阵规模小时,Unroll可以带来可观的性能提升。
- 当矩阵规模增大时,当前程序主要受制于访存(由Roofline模型亦可得到相同结论),可以优化空间有限。
- 当前算法无法使用SIMD指令来获得加速增益。
并行优化
使用多个线程来提升性能:
void solve_triangular_system_swapped_omp( int n, double **L, double *b, double *y )
{
for(int i=0; i<n; i++) y[i] = b[i];
for(int i=1; i<n; i++)
{
#pragma omp parallel shared(L,y) private(j)
{
#pragma omp for
for(int j=i; j<n; j++)
y[j] = y[j] - L[j][i-1]*y[i-1];
}
}
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号