
机器视觉—硬件选型
一、相机选型
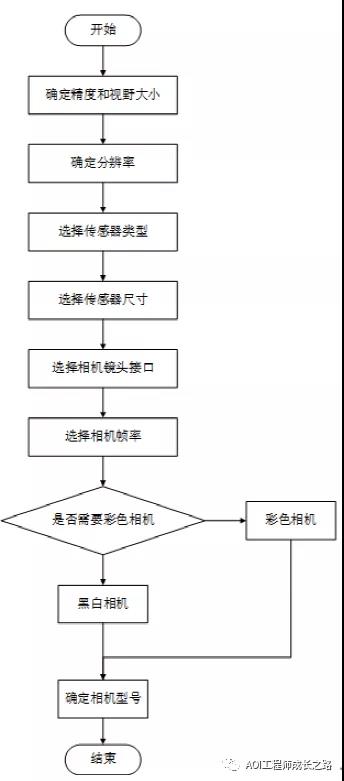
1、选型流程
2、选型步骤
第一步,选择合适的分辨率;
根据需要的分辨精度与视场大小,那么我们选择需要的相机像素关系如下:
相机分辨率(L/W)=视场(L/W)/精度
这仅仅只是相机的像素精度,并不代表整个系统的精度就有如此高,还有其它的精度也要考虑,如镜头的分辨率,系统的抖动,光源的波长(颜色),物体本身的特征等等。但是相机像素精度一定要高于系统所要求的精度,才能有实际的测量意义,亚像素的精度提升在实际测量中并没有太多影响。根据奈奎斯特定理,需要相机分辨率达到系统精度的2倍以上。根据经验,我们需要把计算的相机分辨率乘以3-5,得到我们实际的需求分辨率。
第二步,选择传感器类型;
如果拍摄目标是静态的,为了节约成本,可考虑使用CMCS相机,而如果目标是运动的,则优先考虑CCD相机。
第三步,选择传感器尺寸;
通常传感器的尺寸与所选择的像素是对应的,如30W通常是1/3’的,130W-500W是1/2’的,有些500W也有2/3’的。有些30W的也有1/4’的。如果是同等价位,那么我们优先选择传感器尺寸大的。
第四步,选择相机镜头接口;
一般的相机都是C/CS接口的,需要注意与镜头的对应。如果有其它接口的镜头,也要考虑相机的接口。
第五步,选择相机帧率;
相机采集和传输图像的速度,对于面阵相机一般为每秒采集的帧数(Frames/Sec),对于线阵相机为每秒采集的行数(HZ),最大的帧率决定了相机的拍摄时间。
第六步,选择相机颜色;
一般在需要使用彩色信息判定失效模型好坏时才会选用彩色相机,否则选用黑白相机。
2、选型步骤
第一步,选择合适的分辨率;
根据需要的分辨精度与视场大小,那么我们选择需要的相机像素关系如下:
相机分辨率(L/W)=视场(L/W)/精度
这仅仅只是相机的像素精度,并不代表整个系统的精度就有如此高,还有其它的精度也要考虑,如镜头的分辨率,系统的抖动,光源的波长(颜色),物体本身的特征等等。但是相机像素精度一定要高于系统所要求的精度,才能有实际的测量意义,亚像素的精度提升在实际测量中并没有太多影响。根据奈奎斯特定理,需要相机分辨率达到系统精度的2倍以上。根据经验,我们需要把计算的相机分辨率乘以3-5,得到我们实际的需求分辨率。
第二步,选择传感器类型;
如果拍摄目标是静态的,为了节约成本,可考虑使用CMCS相机,而如果目标是运动的,则优先考虑CCD相机。
第三步,选择传感器尺寸;
通常传感器的尺寸与所选择的像素是对应的,如30W通常是1/3’的,130W-500W是1/2’的,有些500W也有2/3’的。有些30W的也有1/4’的。如果是同等价位,那么我们优先选择传感器尺寸大的。
第四步,选择相机镜头接口;
一般的相机都是C/CS接口的,需要注意与镜头的对应。如果有其它接口的镜头,也要考虑相机的接口。
第五步,选择相机帧率;
相机采集和传输图像的速度,对于面阵相机一般为每秒采集的帧数(Frames/Sec),对于线阵相机为每秒采集的行数(HZ),最大的帧率决定了相机的拍摄时间。
第六步,选择相机颜色;
一般在需要使用彩色信息判定失效模型好坏时才会选用彩色相机,否则选用黑白相机。
二、镜头
1、选型流程

2、选择步骤
第一步,确定是否需要远心镜头;
下面几种情况需使用远心镜头:
Ø当被检测物体厚度较大,需要检测不止一个平面时,典型应用如食品盒,饮料瓶等;
Ø当被测物体的摆放位置不确定,可能跟镜头成一定角度时;
Ø当被测物体在被检测过程中上下跳动,如生产线上下震动导致工作距离发生变化时;
Ø当被测物体带孔径、或是三维立体物体时;
Ø当需要低畸变率、图像效果亮度几乎完全一致时;
Ø当需要检测的缺陷只在同一方向平行照明下才能检测到时;
Ø当需要超过检测精度时,如容许误差为1um时。
第二步,确定同一工作距离下是否需要改变放大倍率;
当需要改变放大倍率时,选择变倍镜头;当不需要改变放大倍率时,选择定焦镜头。
第三步,确定放大倍率;
第四步,计算焦距;

第五步,确定工业相机镜头接口、CCD尺寸(靶面尺寸)和分辨率;
镜头接口与相机接口匹配或通过外加转换口匹配即可:镜头可支持的最大CCD尺寸应大于等于选配相机CCD芯片尺寸
第六步,确定景深;
有些检测或测量中必须将工业相机成一定角度且要求整个物体成像清晰;被测目标不在同一个平面上,这就需要考虑镜头的景深
三、光源
现阶段光源主要靠经验和现场测试确定型号!下面介绍常用的几种光源的应用场景和选择要领。
常用光源有:环形光源、条形光源、背光光源、同轴光源、球积分光源
1、环形光源
环光应用场景:
表面碰伤、划伤等缺陷检测;印刷字符、标志、条码、指纹、图文识别等
环光选型要领:
Ø了解光源安装距离,过滤掉某些角度光源;例如要求光源安装尺寸高,就可以过滤掉大角度光源,选择用小角度光源,同样,安装高度越高,要求光源的直径越大;
Ø目标面积小,且主要特性在表面中间,可选择小尺寸0角度或小角度光源;
Ø目标需要表现的特征如果在边缘,可选择90度角环光,或大尺寸高角度环形光;
Ø检测表面划伤,可选择90度角环光,尽量选择波长短的光源;
2、条形光源
条光应用场景:
金属表面检查;图像扫描;表面裂缝检测;LCD面板检查等。
条光选型要领:
Ø条光照射宽度最好大于检测的距离,否则可能会照射距离远造成亮度差,或者是距离近而幅射面积不够;
Ø条光长度能够照明所需打亮的位置即可,无须太长造成安装不便,同时也增加成本,一般情况下,光源的安装高度会影响到所选用条光的长度,高度越高,光源长度要求越长,否则图像两侧亮度传经比中间暗;
Ø如果照明目标是高反光物体,最好加上漫射板,如果是黑色等暗色不反光产品,也可以拆掉漫射板以提高亮度;
3、背光光源
背光源应用场景:
高速度、短曝光场合下的轮廓测量;机械零件尺寸测量;电子元件、IC的外形检测等。
背光源选型要领:
Ø选择背光源时,根据物体的大小选择合适大小的背光源,以免增加成本造成浪费;
Ø背光源四周一条由于的外壳遮挡,因此其亮度会低于中间部位,因此,选择背光源时,尽量不要使目标正好位于背光源边缘;
Ø背光源一般在检测轮廓时,可以尽量使用波长短的光源,波长短的光源其衍射性弱,图像边缘不容易产生重影,对比度更高;
Ø背光源与目标之间的距离可以通过调整来达到最佳的效果,并非离得越近效果越好,也非越远越好;
Ø检测液位可以将背光源侧立使用;
Ø圆轴类的产品,螺旋状的产品尽量使用平行背光源;
4、同轴光光源
同轴光应用场景:
反光件表面凹坑、损伤、缺陷;印刷电路板各种字符、图案;Mark点定位;玻璃表面、尺寸;各类二维码等。
同轴光选型要领:
Ø选择同轴光时主要看其发光面积,根据目标的大小来选择合适发光面积的同轴光;
Ø同轴光的发光面积最好比目标尺寸大1.5~2倍左右,因为同轴光的光路设计是让光路通过一片45度半反半透镜改变,光源靠近灯板的地方会比远离灯板的亮度高,因此,尽量选择大一点的发光面避免光线左右不均匀;
Ø同轴光在安装时尽量不要离目标太高,越高,要求选用的同轴光越大,才能保证才均匀性;
5、球积分光源
球积分应用场景:
曲面、表面、凹凸、弧形表面检测;金属、玻璃表面反光较强的物体表面检测等。
球积分选型要领:
Ø选择球积分光源时主要是为了使光源发出的光线均匀分布在整个图像上,消除放光;
四、硬件选型目的:
选择合适硬件的目的就是为了得到一张合适的图片,判断一张图片是否合适的标准主要是以下几点:
1、视觉系统精度高
Ø视觉系统精度=单方向视野范围大小/相机单方向分辨率
Ø视觉精度决定于相机分辨率及视野
Ø视野大小合适
Ø相机分辨率相同视野越小系统精度越高
Ø视野相同相机分辨率越高系统精度越高
2、清晰成像
Ø确定图象中所要检测的部分处于清晰的焦距之内
Ø当图象中检测部分不处于同一焦平面时,需要考虑镜头的景深
3、对比度高,特征真实
Ø对比度明显,目标与背景的边界清晰;
Ø对于视觉软件处理,好的图像是目标区域黑白分明
4、均匀性好
Ø背景尽量淡化而且均匀,不干扰图像处理;
Ø避免过曝造成的真实边被吃掉
Ø避免受到环境光的影响
5、颜色真实
Ø与颜色有关的还需要颜色真实,亮度适中,不过度曝光
6、图像稳定
Ø图像稳定,能够兼容多种物料变化
Ø物料再视野中位置发生变动时,目标特征边稳定,不会改变
来源:AOI工程师成长之路

 浙公网安备 33010602011771号
浙公网安备 33010602011771号