Thread RCP和NCP方案
【技术专栏】泰凌微电子Thread RCP和NCP方案介绍(一) https://mp.weixin.qq.com/s/Qn0WCaJCT5hJP9fgqB9o1g
【技术专栏】泰凌微电子 Thread RCP 和 NCP 方案介绍(二) https://mp.weixin.qq.com/s/gbQFljbzf7kLdh8HYYbPBA
【技术专栏】泰凌微电子Thread RCP和NCP方案介绍(一)
1
介绍
Thread规范建立了一种可靠、安全且能效高的无线通信协议,适用于资源受限的设备,常见于智能家居和商业建筑。OpenThread包含了Thread的完整网络层范围,包括IPv6、6LoWPAN、带有MAC安全性的IEEE 802.15.4、网状链路建立和网状路由等功能。
Telink已将由谷歌的团队开发的OpenThread实现整合到Zephyr RTOS中,实现了与Telink硬件的无缝兼容。这个整合的源代码可以在GitHub上方便地获取,并且还提供了软件开发工具包(SDK)。
在这个教程的上半部分中,您将在Telink Zephyr开发环境上构建OpenThread NCP和RCP固件。
学习内容
- 使用Telink Zephyr开发环境配置OpenThread编译环境。
- 构建OpenThread Co-Processor固件(
ot-ncp-ftd和ot-rcp)。
所需条件
硬件:
-
2块B91开发套件。
-
1台Raspberry Pi 3B+或更高版本,并安装Raspbian操作系统映像。
-
1台Linux主机,至少带有两个USB端口。
-
1个已连接互联网的交换机(或路由器)和若干条以太网电缆。
软件:
-
Telink烧录和调试工具 —— LinuxBDT。
-
其他工具,比如Git和West。
2
前提条件
-
Thread基本概念和OpenThread Co-Processor
在进行本教程之前,建议先完成OpenThread Simulation codelab并阅读OpenThread Co-Processor Designs,以便熟悉基本的Thread概念和OpenThread Co-Processor架构,对RCP和NCP两种设备有一个简单了解。
-
Linux主机
Linux主机(Ubuntu v20.04 LTS或更高版本)充当构建机器,用于设置Telink Zephyr开发环境并烧录所有Thread开发板。为了完成这些任务,Linux主机需要两个可用的USB端口和互联网连接。
-
Telink B91开发套件
本教程需要2块B91开发板。下面的图片展示了一个套件中所需的最少组件。
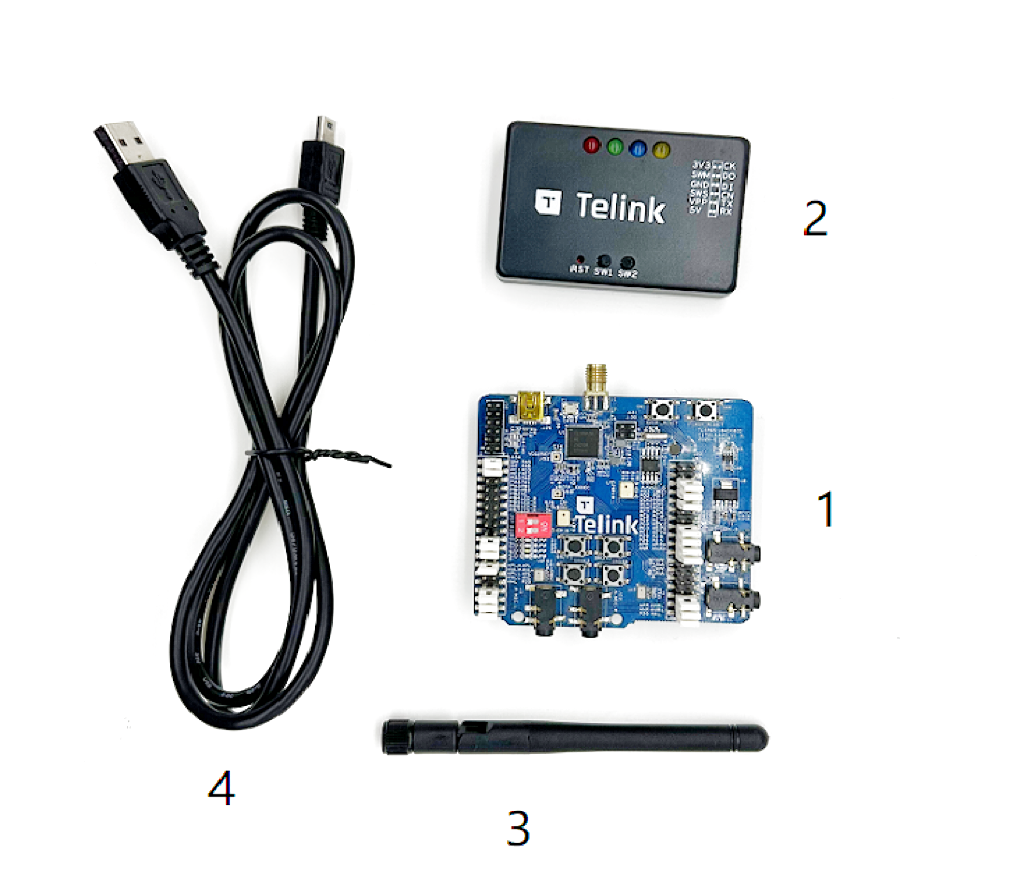
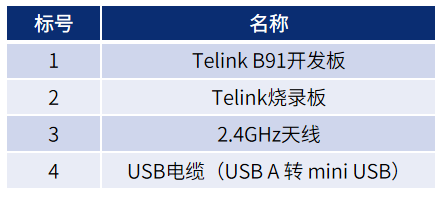
本教程将使用一块B91开发板作为RCP(无线电协处理器),使用另一个B91开发板作为NCP(网络协处理器)。如果您尚未拥有这块开发板,您可以从Telink官方网站获取有关B91开发套件的更多详细信息。需要用到的部分组件如下表所示:
-
安装有Raspbian操作系统镜像的树莓派3B+或更高版本
在本教程中,需要使用带有Raspbian Bullseye Lite OS image 或Raspbian Bullseye with Desktop的树莓派3B+或更高版本。它通过以太网连接到互联网,并将配置为OpenThread边界路由器(OTBR)的主机。
-
网络连接
本教程需要一个已连接互联网的交换机(或路由器)和若干条以太网电缆。它们用于将Raspberry Pi与Linux主机连接起来,便于用户通过主机对Raspberry Pi进行配置。
-
LinuxBDT
Telink 烧录和调试工具 (BDT) 适用于所有Telink芯片系列,可用于擦除和烧录OpenThread固件到Telink B91开发套件上。在您的Linux主机上安装基于X86架构的LinuxBDT。
-
其他
-
Git,用于设置Telink Zephyr开发环境。
-
West,用于管理Zephyr项目并构建OpenThread二进制文件。
3
固件设置
-
Telink Zephyr开发环境设置
在Linux主机上打开命令行,执行以下命令,以确保您的APT软件包管理器是最新的。
$ sudo apt update
$ sudo apt upgrade
完成后,继续执行以下步骤。
1、安装依赖项。
$ wget https://apt.kitware.com/kitware-archive.sh
$ sudo bash kitware-archive.sh
$ sudo apt install --no-install-recommends git cmake ninja-build gperf \
ccache dfu-util device-tree-compiler \
python3-dev python3-pip python3-setuptools python3-tk python3-wheel xz-utils file \
make gcc gcc-multilib g++-multilib libsdl2-dev
Zephyr目前需要主要依赖项的最低版本,例如 CMake (3.20.0)、Python3 (3.6)、Devicetree 编译器 (1.4.6)。
$ cmake --version
$ python3 --version
$ dtc --version
在执行后续步骤之前,验证系统上安装的版本。如果版本不对,将 APT 镜像切换到稳定且最新的镜像,或手动更新这些依赖项。
2、安装west。
$ pip3 install --user -U west
$ echo 'export PATH=~/.local/bin:"$PATH"' >> ~/.bashrc
$ source ~/.bashrc确保
~/.local/bin 包含在 $PATH 环境变量中。
3、获取Zephyr项目的源码。
$ west init ~/zephyrproject
$ cd ~/zephyrproject
$ west update
$ west blobs fetch hal_telink
$ west zephyr-export在中国大陆,使用
west init ~/zephyrproject 和 west update 获取 Zephyr 源代码,通常需要花费额外的时间。此外,某些项目可能无法从国外服务器更新,寻找其他方法来下载最新的源代码。
4、为 Zephyr 安装额外的 Python 依赖项。
$ pip3 install --user -r ~/zephyrproject/zephyr/scripts/requirements.txt
5、设置 Zephyr 工具链。下载 Zephyr 工具链(大约 1~2 GB)到本地目录中,以允许您烧录固件到开发板。在中国大陆境内,该步骤可能需要花费额外时间。
$ wget https://github.com/zephyrproject-rtos/sdk-ng/releases/download/v0.16.1/zephyr-sdk-0.16.1_linux-x86_64.tar.xz
$ wget -O - https://github.com/zephyrproject-rtos/sdk-ng/releases/download/v0.16.1/sha256.sum | shasum --check --ignore-missing
下载Zephyr SDK并将其放置在推荐路径中,如下所示。
$HOME/zephyr-sdk[-x.y.z]
$HOME/.local/zephyr-sdk[-x.y.z]
$HOME/.local/opt/zephyr-sdk[-x.y.z]
$HOME/bin/zephyr-sdk[-x.y.z]
/opt/zephyr-sdk[-x.y.z]
/usr/zephyr-sdk[-x.y.z]
/usr/local/zephyr-sdk[-x.y.z]
其中 [-x.y.z] 可以是任何文本的可选项,例如 -0.13.2。SDK安装后不能移动该目录。接着安装Zephyr工具链。
$ tar xvf zephyr-sdk-0.16.1_linux-x86_64.tar.xz
$ cd zephyr-sdk-0.16.1
$ ./setup.sh -t riscv64-zephyr-elf -h -c
6、构建Hello World示例。使用Hello World示例验证官方Zephyr项目配置是否正确,然后再继续设置自定义项目。
$ cd ~/zephyrproject/zephyr
$ west build -p auto -b tlsr9518adk80d samples/hello_world使用west build命令从Zephyr存储库的根目录构建hello_world示例。您可以在
build/zephyr 目录下找到名为 zephyr.bin 的固件。
7、将Zephyr环境脚本添加到 ~/.bashrc。在bash中执行一下命令。
$ echo "source ~/zephyrproject/zephyr/zephyr-env.sh" >> ~/.bashrc
$ source ~/.bashrc
8、添加Telink Zephyr远程库。下载Telink repo到本地作为开发分支并更新该分支。
$ cd ~/zephyrproject/zephyr
$ git remote add telink-semi https://github.com/telink-semi/zephyr
$ git fetch telink develop
$ git checkout develop
$ cd ..
$ west update
$ west blobs fetch hal_telink更多信息参考Zephyr Doc – Getting Started Guide:https://docs.zephyrproject.org/latest/getting_started/index.html
4
固件编译
本教程中将构建两种固件:
-
ot-ncp-ftd -
ot-rcp
编译方法如下:
1、无线电协处理器(ot-rcp)
$ cd ~/zephyrproject
$ rm -rf build_ot_coprocessor
$ west build -b tlsr9518adk80d -d build_ot_coprocessor zephyr/samples/net/openthread/coprocessor -- -DDTC_OVERLAY_FILE="usb.overlay" -DOVERLAY_CONFIG=overlay-rcp-usb-telink.conf
2、网络协处理器(ot-ncp-ftd)
打开位于zephyr/samples/net/openthread/coprocessor/overlay-rcp-usb-telink.conf 文件,按如下示范进行修改。
# Telink RCP USB-CDC-ACM
CONFIG_OPENTHREAD_COPROCESSOR_NCP=y
CONFIG_OPENTHREAD_COPROCESSOR_RCP=n
...
CONFIG_USB_DEVICE_PRODUCT="OpenThread CoProcessor NCP"
zephyr/samples/net/openthread/coprocessor/boards/tlsr9518adk80d.conf 文件,按如下示范进行修改。
CONFIG_OPENTHREAD_NUM_MESSAGE_BUFFERS=256
ot-ncp-ftd 固件。
$ cd ~/zephyrproject
$ rm -rf build_ot_ncp_ftd
$ west build -b tlsr9518adk80d -d build_ot_ncp_ftd zephyr/samples/net/openthread/coprocessor -- -DDTC_OVERLAY_FILE="usb.overlay" -DOVERLAY_CONFIG=overlay-rcp-usb-telink.conf
5
小结
您现在已经了解了下述内容:
-
如何搭建并使用Telink Zephyr开发环境。
-
如何构建
ot-ncp-ftd和ot-rcp两种二进制文件。
在下一篇文章中,您可以使用这两种固件分别与树莓派协同工作,创建和管理Thread网络。

关 于 泰 凌
泰凌微电子致力于为客户提供一站式的低功耗高性能无线连接SoC芯片解决方案,包括经典蓝牙,蓝牙低功耗,蓝牙Mesh,Zigbee,Thread,Matter,Apple HomeKit,Apple“查找(Find My)”,和私有协议等低功耗2.4GHz多协议无线连接系统级芯片和丰富的固件协议栈。公司产品广泛应用于智能照明,智能家居/楼宇,智能遥控,无线外设,智能零售,穿戴设备,无线音频,智能玩具,物流追踪,智慧城市等各类消费和商业应用场景中。
1
介绍
接着本教程的上一篇文章:泰凌微电子Thread RCP和NCP方案介绍(一),本篇将演示使用 LinuxBDT 工具将 OpenThread RCP 和 NCP 固件烧录到 Telink B91 开发板,并且分别与树莓派协同工作,创建和管理 Thread 网络的所必须的步骤。
学习内容
-
分别将 OpenThread Co-Processor 固件( ot-ncp-ftd 和 ot-rcp )烧录到两块 Telink B91 开发板上。
-
在 Raspberry Pi 3B+ 或更高版本上,使用Docker和RCP搭建OpenThread 边界路由器(OTBR)。
-
在 Raspberry Pi 3B+ 或更高版本上,使用 Pyspinel 验证 NCP 功能。
所需条件
硬件:
-
2 块 B91 开发套件。
-
1 台 Raspberry Pi 3B+ 或更高版本,并安装 Raspbian 操作系统映像。
-
1 台 Linux 主机,至少带有两个 USB 端口。
-
1 个已连接互联网的交换机(或路由器)和若干条以太网电缆。
软件:
-
Telink 烧录和调试工具 —— LinuxBDT。
-
其他工具,比如 Git 和 West。
2
固件烧录
泰凌 LinuxBDT 设置
下载 Telink Linux BDT 烧录工具,并将其解压到 Linux 主机的本地目录,例如 ~,以允许用户将固件烧录到B91开发板。
$ cd ~
$ wget http://wiki.telink-semi.cn/tools_and_sdk/Tools/BDT/LinuxBDT.tar.bz2
$ tar -vxf LinuxBDT.tar.bz2
将 BDT 通过 USB 接口连接到 Linux 主机上,在命令行输入如下指令。
$ cd LinuxBDT
$ sudo ./bdt lsusb -v
Bus 002 Device 001: ID 1d6b:0003 xHCI Host Controller
Bus 001 Device 003: ID 0bda:565a Integrated_Webcam_HD
Bus 001 Device 023: ID 413c:301a Dell MS116 USB Optical Mouse
Bus 001 Device 037: ID 248a:826a Telink Web Debugger v3.6
Bus 001 Device 001: ID 1d6b:0002 xHCI Host Controller
能搜索到 Telink Web Debugger v3.6,代表 BDT 烧录器顺利连接到 Linux 主机。
固件烧录
如下图所示,使用USB连接线将一块 Telink B91 开发板连接到 Telink 烧录板。
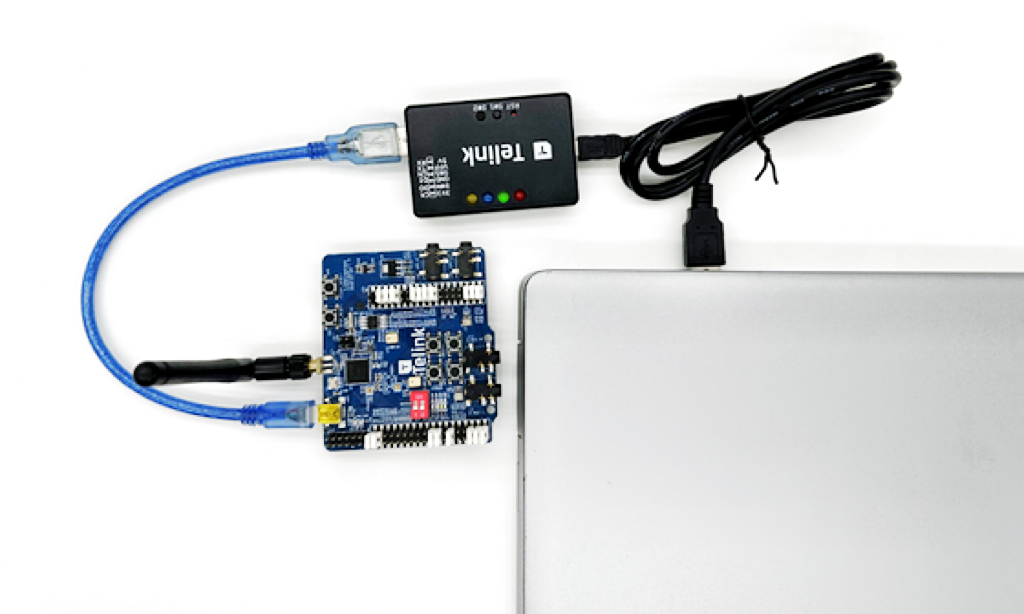
在命令行输入如下指令(以烧录 ot-ncp-ftd固件为例)。
$ cd ~/zephyrproject/build_ot_ncp_ftd/zephyr
$ cp zephyr.bin ~/LinuxBDT/bin/ot-ncp-ftd.bin
$ cd ~/LinuxBDT
$ sudo ./bdt 9518 ac
Activate OK!
$ sudo ./bdt 9518 wf 0 -i bin/ot-ncp-ftd.bin
EraseSectorsize...
Total Time: 2181 ms
Flash writing...
[100%][-] [##################################################]
File Download to Flash at address 0x000000: 491700 bytes
Total Time: 30087 ms
ot-rcp 的烧录方法和 ot-ncp-ftd 的基本一样,不同之处在于固件名称。烧录完成后分别将两块B91开发板做好标记区分,烧录 ot-ncp-ftd 的开发板标记为“NCP”,烧录 ot-rcp 的开发板标记为“RCP”。
3
固件应用
本教程使用树莓派来验证RCP和NCP两种固件功能。
-
树莓派安装 Docker 作为 OTBR 的 Host 端,验证 RCP 功能。
-
树莓派安装并运行 Pyspinel,验证 NCP 功能。
树莓派
1、确保写入 SD 卡中的是 Raspbian Bullseye Lite OS image 或 Raspbian Bullseye with Desktop。
2、您可以选择通过 SSH 连接到树莓派,也可以直接在 Raspbian 桌面上操作。本教程将使用 SSH。
3、在下一步安装 OTBR Docker 或 Pyspinel 之前,先更新本地代码库和软件包管理器。
$ sudo apt-get update
$ sudp apt-get upgrade
无线电协处理器(RCP)
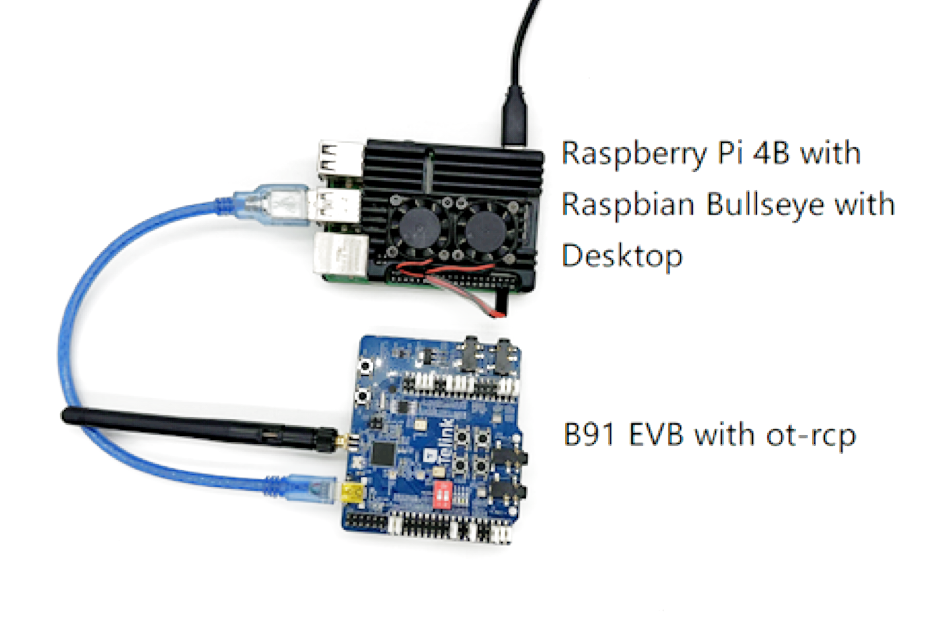
ot-rcp 固件的烧录步骤参考 ot-ncp-ftd 烧录过程,将 B91 开发板连接到树莓派的 USB 端口上,连接方式如下图所示。
安装 Docker
重新启动树莓派并打开一个 SSH 终端窗口。
1、安装 Docker。
$ curl -sSL https://get.docker.com | sh
2、将当前用户添加到 Docker 组中,授予权限,这样在每个命令前都不需要加上sudo。
$ sudo usermod -aG docker $USER
你需要重启树莓派来使改动生效。
3、若 Docker 尚未启动,请将其启动:
$ sudo dockerd
4、OTBR 防火墙脚本在 Docker 容器内创建规则。运行 modprobe 以加载 iptables 的内核模块。
$ sudo modprobe ip6table_filter
配置并运行 Docker
本教程直接从 OpenThread Docker Hub 拉取 OTBR Docker 镜像,该镜像已经过 OpenThread 团队的测试和验证。
1、拉取镜像:
$ docker pull openthread/otbr:latest
2、查看 Docker 容器中的镜像列表:
$ docker images
REPOSITORY TAG IMAGE ID CREATED SIZE
openthread/otbr latest db081f4de15f 6 days ago 766MB
3、通过检查 /dev 确定 RCP 设备的串行端口名称, 出现 ttyACM0 表示 RCP 正确连接。
$ ls /dev/tty*
...
/dev/ttyACM0
...
4、第一次运行 OTBR Docker, 并引用RCP的串行端口(ttyACM0),此后若要继续使用该 OTBR Docker,请使用命令 docker start otbr。
$ docker run --name "otbr" --sysctl "net.ipv6.conf.all.disable_ipv6=0 net.ipv4.conf.all.forwarding=1 net.ipv6.conf.all.forwarding=1" -p 8080:80 --dns=127.0.0.1 -it --volume /dev/ttyACM0:/dev/ttyACM0 --privileged openthread/otbr --radio-url spinel+hdlc+uart:///dev/ttyACM0
5、新开一个 SSH 终端窗口,测试树莓派和 RCP 的连通性,并建立 Thread 网络。
$ docker exec -ti otbr sh -c "sudo ot-ctl"
> state
disabled
Done
> panid 0x1022
Done
> ifconfig up
Done
> thread start
Done
> state
detached
Done
> state
leader
Done
可选用的 Docker 命令:
-
获取正在运行的 Docker 容器信息:
$ docker ps -aq
-
停止 OTBR Docker:
$ docker stop otbr
-
移除 OTBR Docker:
$ docker rm otbr
-
重新加载 OTBR Docker:
$ docker restart otbr
网络协处理器(NCP)
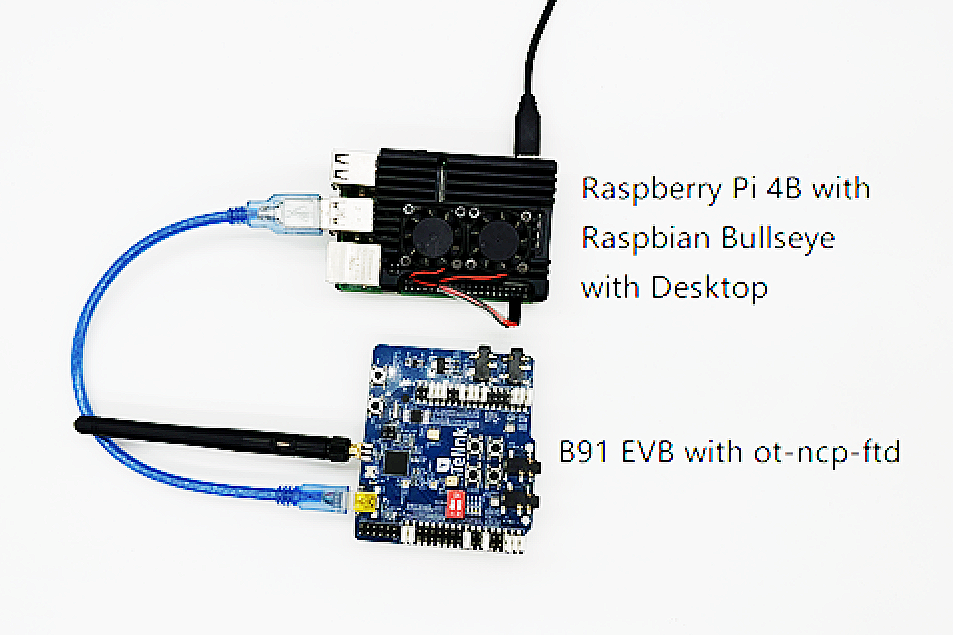
关闭树莓派,拔掉 RCP。将NCP连接到树莓派的 USB 端口上,再重新启动树莓派。连接方式如下图。
安装 Pyspinel
在树莓派上打开一个新的SSH终端窗口。
1、安装依赖项:
$ sudo apt install python3-pip
$ pip3 install --user pyserial ipaddress
2、下载 pyspinel 的源码到本地:
$ git clone https://github.com/openthread/pyspinel
3、安装 Pyspinel:
$ cd pyspinel
$ sudo python3 setup.py install
验证 NCP 功能
1、配置 NCP 连接。
$ sudo chmod a+rw /dev/ttyACM0
2、运行 Pyspinel CLI。
$ spinel-cli.py -u /dev/ttyACM0 -n 1
spinel-cli >
3、查询 NCP 版本。
spinel-cli > version
OPENTHREAD/aabbee49c; Zephyr; Aug 10 2023 14:02:37
Done
4、建立 Thread 网络。
spinel-cli > ifconfig up
Done
spinel-cli > thread start
Done
spinel-cli > state
detached
Done
spinel-cli > state
leader
Done
可以看到 NCP 已成为 leader,Thread 网络被成功创建。
可选用的 spinel-cli 命令:
-
查看帮助菜单获取可用命令。
spinel-cli > help
Available commands (type help <name> for more information):
============================================================
bufferinfo extaddr ncp-filter releaserouterid
channel extpanid ncp-ll64 reset
child h ncp-ml64 rloc16
childmax help ncp-raw route
childtimeout history ncp-tun router
clear ifconfig netdata routerdowngradethreshold
commissioner ipaddr networkidtimeout routerselectionjitter
contextreusedelay joiner networkkey routerupgradethreshold
counters keysequence networkname scan
debug leaderdata panid state
debug-mem leaderweight parent thread
diag mac ping txpower
discover macfilter prefix v
eidcache mfg q vendor
exit mode quit version
4
总结
您现在已经知道:
-
如何搭建并使用 Telink Zephyr 开发环境。
-
如何构建 ot-ncp-ftd 和 ot-rcp 两种二进制文件并将其烧录到B91开发板。
-
如何使用Docker和RCP将Raspberry Pi 3B+ 或更高版本设置为OpenThread边界路由器(OTBR)。
-
在Raspberry Pi 3B+或更高版本上,使用 Pyspinel 验证NCP功能。
由此可见,RCP 和 NCP 方案都可以实现 OTBR 的功能。不过,从目前的社区的支持力度看,RCP 更适合用于 OTBR 的开发。
5
深入阅读
查看openthread.io和GitHub,了解各种OpenThread资源,包括:
-
Supported Platforms
https://openthread.io/platforms/
— discover all the platforms that support OpenThread
-
Build OpenThread
https://openthread.io/guides
— further details on building and configuring OpenThread
-
Thread Primer
https://openthread.io/guides/thread-primer
— covers all the Thread concepts featured in this codelab
参考文档:
OpenThread Co-Processor Designs:
https://openthread.io/platforms/co-processor
OpenThread Pyspinel:
https://openthread.io/guides/pyspinel
OpenThread Border Router:
https://openthread.io/guides/border-router

 浙公网安备 33010602011771号
浙公网安备 33010602011771号