AQS原理学习
AQS#
类如其名,抽象的队列式同步器,AQS定义了一套多线程访问共享资源的同步器框架,许多同步类实现都依赖于它,如常用的ReentrantLock/Semaphore/CountDownLatch...
框架#
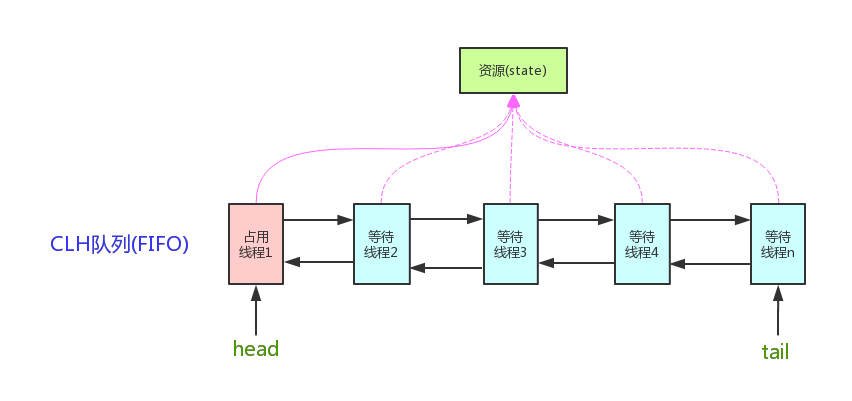
它维护了一个volatile int state(代表共享资源)和一个FIFO线程等待队列(多线程争用资源被阻塞时会进入此队列)。
AQS定义两种资源共享方式:Exclusive(独占,只有一个线程能执行,如ReentrantLock)和Share(共享,多个线程可同时执行,如Semaphore/CountDownLatch)。
不同的自定义同步器争用共享资源的方式也不同。自定义同步器在实现时只需要实现共享资源state的获取与释放方式即可,至于具体线程等待队列的维护(如获取资源失败入队/唤醒出队等),AQS已经在顶层实现好了。自定义同步器实现时主要实现以下几种方法:
- isHeldExclusively():该线程是否正在独占资源。只有用到condition才需要去实现它。
- tryAcquire(int):独占方式。尝试获取资源,成功则返回true,失败则返回false。
- tryRelease(int):独占方式。尝试释放资源,成功则返回true,失败则返回false。
- tryAcquireShared(int):共享方式。尝试获取资源。负数表示失败;0表示成功,但没有剩余可用资源;正数表示成功,且有剩余资源。
- tryReleaseShared(int):共享方式。尝试释放资源,如果释放后允许唤醒后续等待结点返回true,否则返回false。
独占模式获取资源#
Node结点是对每一个等待获取资源的线程的封装,其包含了需要同步的线程本身及其等待状态,如是否被阻塞、是否等待唤醒、是否已经被取消等。变量waitStatus则表示当前Node结点的等待状态,共有5种取值CANCELLED、SIGNAL、CONDITION、PROPAGATE、0。
- CANCELLED(1):表示当前结点已取消调度。当timeout或被中断(响应中断的情况下),会触发变更为此状态,进入该状态后的结点将不会再变化。
- SIGNAL(-1):表示后继结点在等待当前结点唤醒。后继结点入队时,会将前继结点的状态更新为SIGNAL。
- CONDITION(-2):表示结点等待在Condition上,当其他线程调用了Condition的signal()方法后,CONDITION状态的结点将从等待队列转移到同步队列中,等待获取同步锁。
- PROPAGATE(-3):共享模式下,前继结点不仅会唤醒其后继结点,同时也可能会唤醒后继的后继结点。
- 0:新结点入队时的默认状态。
注意,负值表示结点处于有效等待状态,而正值表示结点已被取消。所以源码中很多地方用>0、<0来判断结点的状态是否正常。
acquire方法#
public final void acquire(int arg) {
if (!tryAcquire(arg) &&
acquireQueued(addWaiter(Node.EXCLUSIVE), arg))
selfInterrupt();
}
函数流程如下:
- tryAcquire()尝试直接去获取资源,如果成功则直接返回(这里体现了非公平锁,每个线程获取锁时会尝试直接抢占加塞一次,而CLH队列中可能还有别的线程在等待);
- addWaiter()将该线程加入等待队列的尾部,并标记为独占模式;
- acquireQueued()使线程阻塞在等待队列中获取资源,一直获取到资源后才返回。如果在整个等待过程中被中断过,则返回true,否则返回false。
tryacquire方法#
此方法尝试去获取独占资源。如果获取成功,则直接返回true,否则直接返回false。这也正是tryLock()的语义,这个方法交由自定义同步器去实现,这里只定义了一个接口
addWaiter(Node)方法#
此方法用于将当前线程加入到等待队列的队尾,并返回当前线程所在的结点。
private Node addWaiter(Node mode) {
//以给定模式构造结点。mode有两种:EXCLUSIVE(独占)和SHARED(共享)
Node node = new Node(Thread.currentThread(), mode);
//尝试快速方式直接放到队尾。
Node pred = tail;
if (pred != null) {
node.prev = pred;
if (compareAndSetTail(pred, node)) {
pred.next = node;
return node;
}
}
//上一步快速方式入队失败则通过enq入队。
enq(node);
return node;
}
enq方法#
CAS自旋volatile变量
private Node enq(final Node node) {
//CAS"自旋",直到成功加入队尾
for (;;) {
Node t = tail;
if (t == null) { // 队列为空,创建一个空的标志结点作为head结点,并将tail也指向它。
if (compareAndSetHead(new Node()))
tail = head;
} else {//正常流程,放入队尾
node.prev = t;
if (compareAndSetTail(t, node)) {
t.next = node;
return t;
}
}
}
}
acquireQueued方法#
通过tryAcquire()和addWaiter(),该线程获取资源失败,已经被放入等待队列尾部了。下一步就是在队列等待,进入等待状态休息,直到其他线程彻底释放资源后唤醒自己,自己再拿到资源。
final boolean acquireQueued(final Node node, int arg) {
//标识是否失败
boolean failed = true;
try {
//标记等待过程中是否被中断过
boolean interrupted = false;
//CAS自旋
for (;;) {
//拿到前驱
final Node p = node.predecessor();
//如果前驱是head,即该结点已成老二,那么便有资格去尝试获取资源。
if (p == head && tryAcquire(arg)) {
//拿到资源后,将head指向该结点。所以head所指的标杆结点,就是当前获取到资源的那个结点或null。
setHead(node);
p.next = null; // help GC
failed = false;
return interrupted;
}
//如果线程可以暂停,就通过park()进入waiting状态,直到被unpark()。如果不可中断的情况下被中断了,那么会从park()中醒过来,发现拿不到资源,从而继续进入park()等待。
if (shouldParkAfterFailedAcquire(p, node) &&
parkAndCheckInterrupt())
interrupted = true;
}
} finally {
if (failed)
// 如果等待过程中没有成功获取资源(如timeout,或者可中断的情况下被中断了),那么取消结点在队列中的等待。
cancelAcquire(node);
}
}
shouldParkAfterFailedAcquire方法#
此方法主要用于检查状态,看看当前线程是否真的可以进入waiting状态
private static boolean shouldParkAfterFailedAcquire(Node pred, Node node) {
int ws = pred.waitStatus;//拿到前驱的状态
if (ws == Node.SIGNAL)
//如果已经告诉前驱是SIGNAL状态
return true;
if (ws > 0) {
/*
* 如果前驱放弃了,那就一直往前找,直到找到最近一个正常等待的状态,并排在它的后边。
*/
do {
node.prev = pred = pred.prev;
} while (pred.waitStatus > 0);
pred.next = node;
} else {
//如果前驱正常,那就把前驱的状态设置成SIGNAL
compareAndSetWaitStatus(pred, ws, Node.SIGNAL);
}
return false;
}



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· Manus重磅发布:全球首款通用AI代理技术深度解析与实战指南
· 被坑几百块钱后,我竟然真的恢复了删除的微信聊天记录!
· 没有Manus邀请码?试试免邀请码的MGX或者开源的OpenManus吧
· 【自荐】一款简洁、开源的在线白板工具 Drawnix
· 园子的第一款AI主题卫衣上架——"HELLO! HOW CAN I ASSIST YOU TODAY