
OpenCV-Python 高动态范围 | 六十一
作者|OpenCV-Python Tutorials
编译|Vincent
来源|OpenCV-Python Tutorials
目标
在本章中,我们将
- 了解如何根据曝光顺序生成和显示HDR图像。
- 使用曝光融合来合并曝光序列。
理论
高动态范围成像(HDRI或HDR)是一种用于成像和摄影的技术,可以比标准数字成像或摄影技术重现更大的动态亮度范围。虽然人眼可以适应各种光照条件,但是大多数成像设备每通道使用8位,因此我们仅限于256级。当我们拍摄现实世界的照片时,明亮的区域可能会曝光过度,而黑暗的区域可能会曝光不足,因此我们无法一次拍摄所有细节。HDR成像适用于每个通道使用8位以上(通常为32位浮点值)的图像,从而允许更大的动态范围。
获取HDR图像的方法有多种,但是最常见的一种方法是使用以不同曝光值拍摄的场景照片。要综合这些曝光,了解相机的响应功能以及估算算法的功能非常有用。合并HDR图像后,必须将其转换回8位才能在常规显示器上查看。此过程称为音调映射。当场景或摄像机的对象在两次拍摄之间移动时,还会增加其他复杂性,因为应记录并调整具有不同曝光度的图像。
在本教程中,我们展示了两种算法(Debevec,Robertson)来根据曝光序列生成和显示HDR图像,并演示了另一种称为曝光融合(Mertens)的方法,该方法可以生成低动态范围图像,并且不需要曝光时间数据。此外,我们估计相机响应函数(CRF)对于许多计算机视觉算法都具有重要价值。HDR流水线的每个步骤都可以使用不同的算法和参数来实现,因此请查看参考手册以了解所有内容。
曝光序列HDR
在本教程中,我们将查看以下场景,其中有4张曝光图像,曝光时间分别为15、2.5、1 / 4和1/30秒。 (你可以从Wikipedia下载图像)

1. 将曝光图像加载到列表中
import cv2 as cv
import numpy as np
# 将曝光图像加载到列表中
img_fn = ["img0.jpg", "img1.jpg", "img2.jpg", "img3.jpg"]
img_list = [cv.imread(fn) for fn in img_fn]
exposure_times = np.array([15.0, 2.5, 0.25, 0.0333], dtype=np.float32)
2. 将曝光合成HDR图像
在此阶段,我们将曝光序列合并为一张HDR图像,显示了OpenCV中的两种可能性。 第一种方法是Debevec,第二种方法是Robertson。 请注意,HDR图像的类型为float32,而不是uint8,因为它包含所有曝光图像的完整动态范围。
# 将曝光合成HDR图像
merge_debevec = cv.createMergeDebevec()
hdr_debevec = merge_debevec.process(img_list, times=exposure_times.copy())
merge_robertson = cv.createMergeRobertson()
hdr_robertson = merge_robertson.process(img_list, times=exposure_times.copy())
3. 色调图HDR图像
我们将32位浮点HDR数据映射到[0..1]范围内。实际上,在某些情况下,该值可以大于1或小于0,因此请注意,我们稍后将必须裁剪数据以避免溢出。
# 色调图HDR图像
tonemap1 = cv.createTonemap(gamma=2.2)
res_debevec = tonemap1.process(hdr_debevec.copy())
4. 使用Mertens融合曝光
在这里,我们展示了一种替代算法,用于合并曝光图像,而我们不需要曝光时间。我们也不需要使用任何色调映射算法,因为Mertens算法已经为我们提供了[0..1]范围内的结果。
# 使用Mertens融合曝光
merge_mertens = cv.createMergeMertens()
res_mertens = merge_mertens.process(img_list)
5. 转为8-bit并保存
为了保存或显示结果,我们需要将数据转换为[0..255]范围内的8位整数。
# 转化数据类型为8-bit并保存
res_debevec_8bit = np.clip(res_debevec*255, 0, 255).astype('uint8')
res_robertson_8bit = np.clip(res_robertson*255, 0, 255).astype('uint8')
res_mertens_8bit = np.clip(res_mertens*255, 0, 255).astype('uint8')
cv.imwrite("ldr_debevec.jpg", res_debevec_8bit)
cv.imwrite("ldr_robertson.jpg", res_robertson_8bit)
cv.imwrite("fusion_mertens.jpg", res_mertens_8bit)
结果
你可以看到不同的结果,但是请考虑到每种算法都有其他额外的参数,你应该将它们附加以达到期望的结果。 最佳实践是尝试不同的方法,然后看看哪种方法最适合你的场景。
Debevec:

Robertson:

Mertenes融合

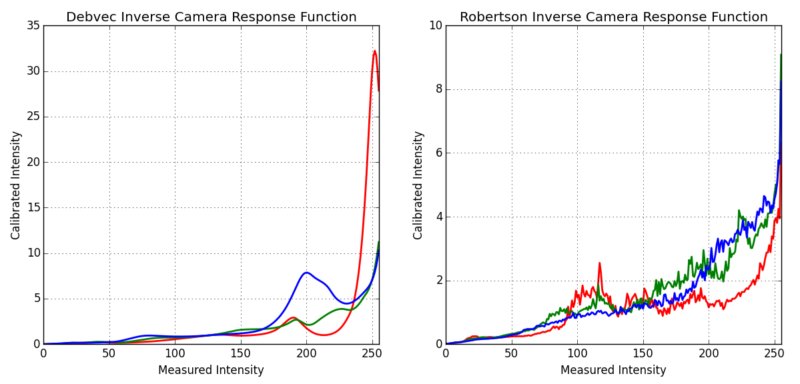
估计相机响应函数
摄像机响应功能(CRF)使我们可以将场景辐射度与测量强度值联系起来。CRF在某些计算机视觉算法(包括HDR算法)中非常重要。在这里,我们估计逆相机响应函数并将其用于HDR合并。
# 估计相机响应函数(CRF)
cal_debevec = cv.createCalibrateDebevec()
crf_debevec = cal_debevec.process(img_list, times=exposure_times)
hdr_debevec = merge_debevec.process(img_list, times=exposure_times.copy(), response=crf_debevec.copy())
cal_robertson = cv.createCalibrateRobertson()
crf_robertson = cal_robertson.process(img_list, times=exposure_times)
hdr_robertson = merge_robertson.process(img_list, times=exposure_times.copy(), response=crf_robertson.copy())
相机响应功能由每个颜色通道的256长度向量表示。 对于此序列,我们得到以下估计:
附加资源
- Paul E Debevec and Jitendra Malik. Recovering high dynamic range radiance maps from photographs. In ACM SIGGRAPH 2008 classes, page 31. ACM, 2008. [48]
- Mark A Robertson, Sean Borman, and Robert L Stevenson. Dynamic range improvement through multiple exposures. In Image Processing, 1999. ICIP 99. Proceedings. 1999 International Conference on, volume 3, pages 159–163. IEEE, 1999. [182]
- Tom Mertens, Jan Kautz, and Frank Van Reeth. Exposure fusion. In Computer Graphics and Applications, 2007. PG'07. 15th Pacific Conference on, pages 382–390. IEEE, 2007. [148]
- Images from Wikipedia-HDR
练习
- 尝试所有色调图算法:cv::TonemapDrago,cv::TonemapMantiuk和cv::TonemapReinhard
- 尝试更改HDR校准和色调图方法中的参数。

