激活函数
什么是激活函数?
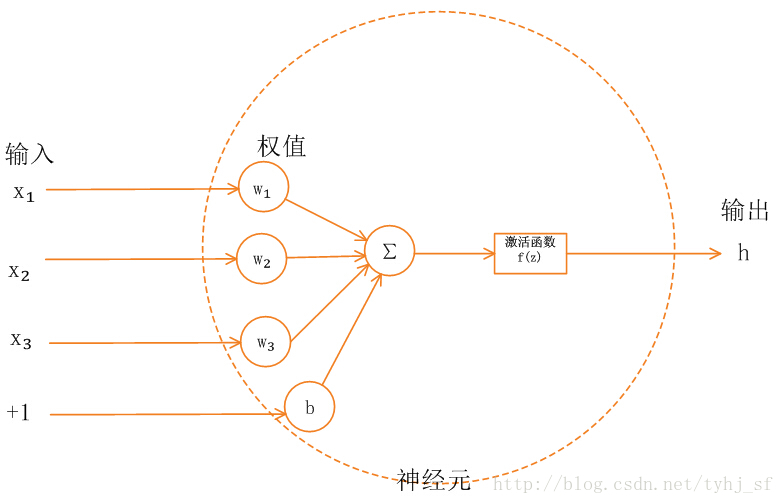
上一层节点的输出和下一层节点的输入之间有个函数关系,这个函数就是激活函数。
激活函数的用途(为什么需要激活函数)?
不用激活函数,输出都是输入的线性组合,网络的逼近能力有限,所以用非线性函数作为激励函数,就能使得神经网络的表达能力更强。(不再是线性组合,几乎可以逼近任意函数)
有哪些激活函数,都有什么性质和特点?
早期研究神经网络主要采用sigmoid函数或者tanh函数,输出有界,很容易充当下一层的输入。
近些年Relu函数及其改进型(如Leaky-ReLU、P-ReLU、R-ReLU等)在多层神经网络中应用比较多。下面我们来总结下这些激活函数:
Sigmoid函数
Sigmoid 是常用的非线性的激活函数,它的数学形式如下:
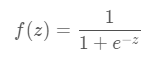
Sigmoid的几何图像如下:
特点:它能够把输入的连续实值变换为0和1之间的输出,特别的,如果是非常大的负数,那么输出就是0;如果是非常大的正数,输出就是1.
缺点:
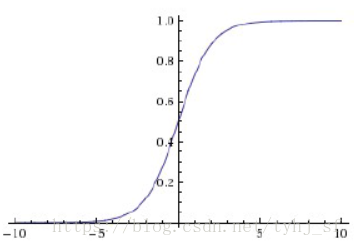
缺点1:梯度爆炸和梯度消失,其中梯度爆炸发生的概率非常小,而梯度消失发生的概率比较大。首先来看Sigmoid函数的导数,如下图所示: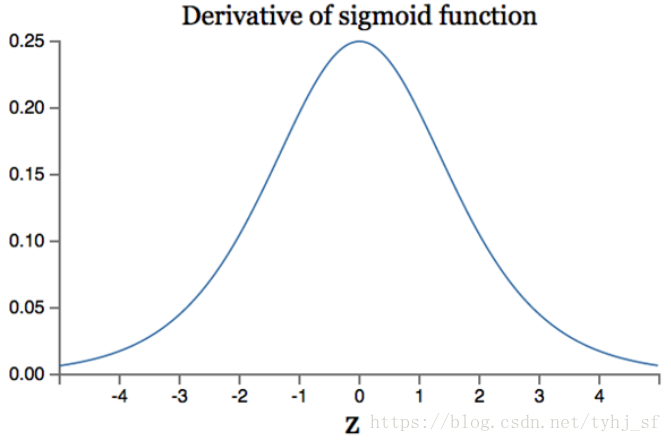
sigmoid函数导数最大才1/4,梯度反向传播的时候,每层都会减少,如果隐藏层很多,梯度会接近0,出现梯度消失。如果网络权值初始化为 (1,+∞),会出现梯度爆炸。
缺点2:不是原点对称,输出不是0均值的,因为输出都是大于0的,这样输出的信号输入到下一层节点,如果求得的w的梯度为正,那么w就都往正方向更新,要么都往负方向更新,会造成一种捆绑效果,使得收敛缓慢。当然了,如果按batch去训练,那么那个batch可能得到不同的信号,所以这个问题还是可以缓解一下的。因此,非0均值这个问题虽然会产生一些不好的影响,不过跟上面提到的梯度消失问题相比还是要好很多的。
缺点3:其解析式中含有幂运算,计算机求解时相对来讲比较耗时。对于规模比较大的深度网络,这会较大地增加训练时间。
tanh函数
tanh函数解析式:
tanh函数及其导数的几何图像如下图:

tanh读作Hyperbolic Tangent,它解决了Sigmoid函数的不是zero-centered输出问题,然而,梯度消失(gradient vanishing)的问题和幂运算的问题仍然存在。
Relu函数
Relu函数的解析式:
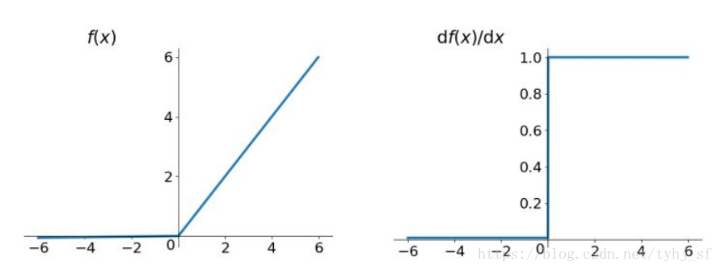
Relu函数及其导数的图像如下图所示:
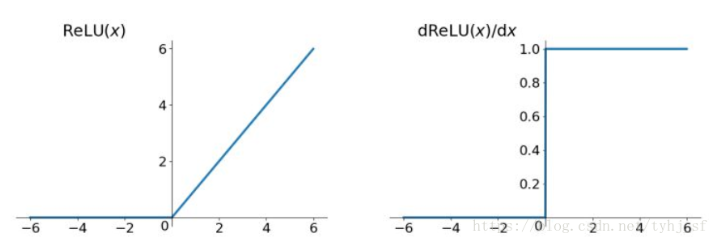
ReLU函数其实就是一个取最大值函数,注意这并不是全区间可导的,但是我们可以取sub-gradient,如上图所示。ReLU虽然简单,但却是近几年的重要成果,有以下几大优点:
1) 解决了gradient vanishing问题 (在正区间)
2)计算速度非常快,只需要判断输入是否大于0
3)收敛速度远快于sigmoid和tanh
ReLU也有几个需要特别注意的问题:
1)ReLU的输出不是zero-centered
2)Dead ReLU Problem,指的是某些神经元可能永远不会被激活,导致相应的参数永远不能被更新。有两个主要原因可能导致这种情况产生: (1) 非常不幸的参数初始化,这种情况比较少见 (2) learning rate太高导致在训练过程中参数更新太大,不幸使网络进入这种状态。解决方法是可以采用Xavier初始化方法,以及避免将learning rate设置太大或使用adagrad等自动调节learning rate的算法。
尽管存在这两个问题,ReLU目前仍是最常用的activation function,在搭建人工神经网络的时候推荐优先尝试!
Leaky ReLU函数(PReLU)
Leaky Relu函数及其导数的图像如下图所示:
人们为了解决Dead ReLU Problem,提出了将ReLU的前半段设为αx \alpha xαx而非0,通常α=0.01 \alpha=0.01α=0.01。另外一种直观的想法是基于参数的方法,即ParametricReLU:f(x)=max(αx,x) Parametric ReLU:f(x) = \max(\alpha x, x)ParametricReLU:f(x)=max(αx,x),其中α \alphaα
可由方向传播算法学出来。理论上来讲,Leaky ReLU有ReLU的所有优点,外加不会有Dead ReLU问题,但是在实际操作当中,并没有完全证明Leaky ReLU总是好于ReLU。
ELU (Exponential Linear Units) 函数
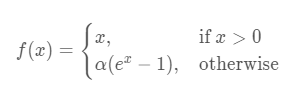
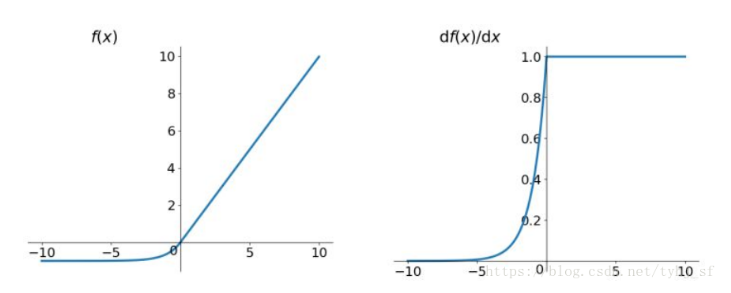
ELU也是为解决ReLU存在的问题而提出,显然,ELU有ReLU的基本所有优点,以及:
不会有Dead ReLU问题
输出的均值接近0,zero-centered
它的一个小问题在于计算量稍大。类似于Leaky ReLU,理论上虽然好于ReLU,但在实际使用中目前并没有好的证据ELU总是优于ReLU。
MaxOut函数
这个函数可以参考论文《maxout networks》,Maxout是深度学习网络中的一层网络,就像池化层、卷积层一样等,我们可以把maxout 看成是网络的激活函数层,我们假设网络某一层的输入特征向量为:X=(x1,x2,……xd),也就是我们输入是d个神经元。Maxout隐藏层每个神经元的计算公式如下: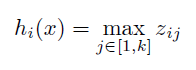
上面的公式就是maxout隐藏层神经元i的计算公式。其中,k就是maxout层所需要的参数了,由我们人为设定大小。就像dropout一样,也有自己的参数p(每个神经元dropout概率),maxout的参数是k。公式中Z的计算公式为:
权重w是一个大小为(d,m,k)三维矩阵,b是一个大小为(m,k)的二维矩阵,这两个就是我们需要学习的参数。如果我们设定参数k=1,那么这个时候,网络就类似于以前我们所学普通的MLP网络。
我们可以这么理解,本来传统的MLP算法在第i层到第i+1层,参数只有一组,然而现在我们不这么干了,我们在这一层同时训练n组的w、b参数,然后选择激活值Z最大的作为下一层神经元的激活值,这个max(z)函数即充当了激活函数。
应用中如何选择合适的激活函数?
这个问题目前没有确定的方法,凭一些经验吧。
1)深度学习往往需要大量时间来处理大量数据,模型的收敛速度是尤为重要的。所以,总体上来讲,训练深度学习网络尽量使用zero-centered数据 (可以经过数据预处理实现) 和zero-centered输出。所以要尽量选择输出具有zero-centered特点的激活函数以加快模型的收敛速度。
2)如果使用 ReLU,那么一定要小心设置 learning rate,而且要注意不要让网络出现很多 “dead” 神经元,如果这个问题不好解决,那么可以试试 Leaky ReLU、PReLU 或者 Maxout.
3)最好不要用 sigmoid,你可以试试 tanh,不过可以预期它的效果会比不上 ReLU 和 Maxout.

