五、SSD原理(Single Shot MultiBox Detector)
主流的算法主要分为两个类型:
(1)tow-stage
R-CNN系列算法,其主要思路是先通过启发式方法(selective search)或者CNN网络(RPN)产生一些列稀疏的候选框,然后对这些候选框进行分类和回归。two-stage方法的优势是准确度高。
(2)one-stage
如YOLO和SSD,主要思路是均匀的在图片的不同位置进行密集抽样,抽样时可以采用不同尺度和长宽比,然后利用CNN提取特征后直接进行分类和回归,整个过程只需要一部,所以其优势是速度快。
均匀的密集采样的一个重要缺点是训练比较困难,这主要是因为正样本与负样本极其不平衡,导致模型准确度稍低,不同算法的性能如图:
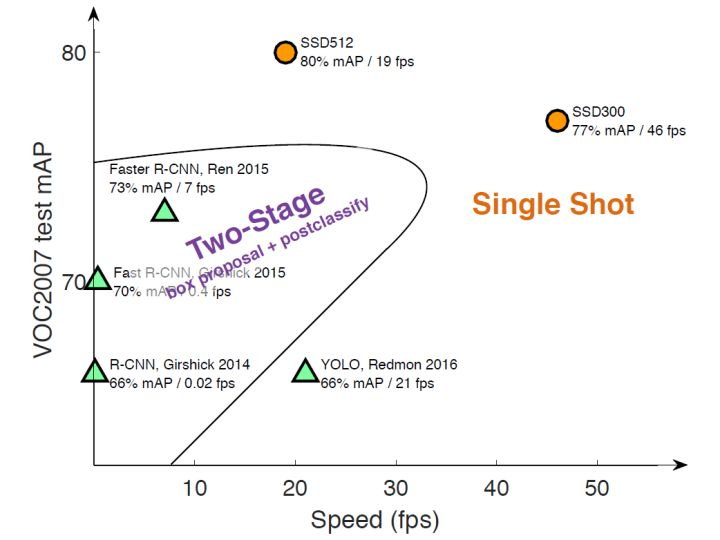
SSD英文名是(Single Shot MultiBox Detector),single shot指的是SSD算法属于one-stage方法,MultiBox说明SSD是多框预测。
上图可以看出SSD在准确度和速度(除了SSD512)上都比YOLO要好很多。
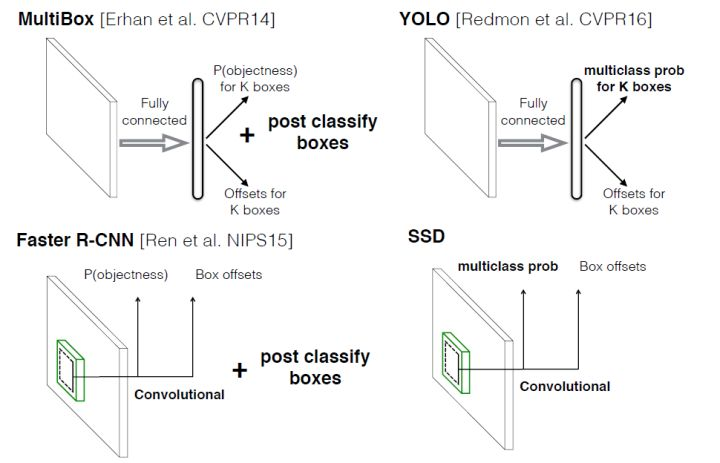
下图是不同算法的基本框架图,对于Faster R-CNN,其先通过CNN得到候选框,然后再进行分类和回归,而Yolo与SSD可以一步到位完成检测。相比于YOLO,SSD采用CNN来直接进行检测,而不是像YOLO那样在全连接层之后再做检测。
其实采用卷积直接做检测只是SSD相比于YOLO的其中一个不同点,另外还有两个重要的改变,一是SSD提取不同尺度的特征图来做检测,大尺度特征图(较靠前的特征图)用来检测小物体,小尺度特征图(较靠后的特征图,感受野大)用来检测大物体;二是SSD采用了不同尺度和长宽比的先验框(Prior boxes, Default boxes,在Faster R-CNN中叫做锚,Anchors)。Yolo算法的缺点是难以检测小目标,而且定位不准,但是这几点重要的改进使得SSD在一定程度上克服这些缺点。
设计理念
SSD和YOLO都是采用一个CNN网络来进行检测,但是却采用了多尺度的特征图,其基本架构如下图,下面将SSD核心设计理念总结为以下三点:
(1)采用多尺度特征图用于检测
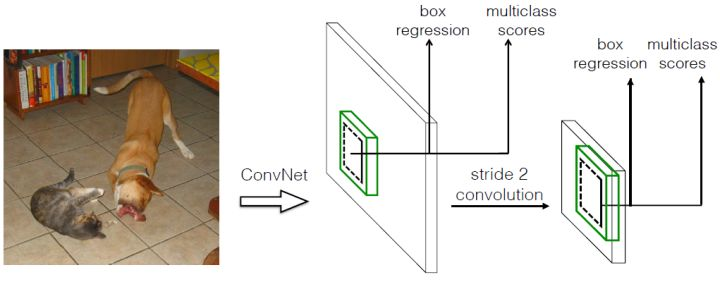
所谓多尺度采用大小不同的特征图,CNN网络一般前面的特征图比较大,后面会逐渐采用stride=2的卷积或者pool来降低特征图大小,下图所示,一个比较大的特征图和一个比较小的特征图,他们都用来做检测。这样做的好处是比较大的特征图用来检测相对较小的目标,而小的特征图负责检测大目标,8x8的特征图可以划分更多的单元,但是其每个单元的default box尺度比较小。

(2)采用卷积进行检测
与Yolo最后采用全连接层不同,SSD直接采用卷积对不同的特征图来进行提取检测结果。对于形状为 的特征图,只需要采用
的特征图,只需要采用 这样比较小的卷积核得到检测值。
这样比较小的卷积核得到检测值。
(3)设置先验框default boxes
在YOLO中,每个单元预测多个边界框,但是其都是相对这个单元本身(正方块),但是真实目标的形状是多变的,Yolo需要在训练过程中自适应目标的形状。而SSD借鉴了Faster R-CNN中anchor的理念,每个单元设置尺度或者长宽比不同的default boxes,预测的边界框(bounding boxes)是以这些先验框为基准的,在一定程度上减少训练难度。
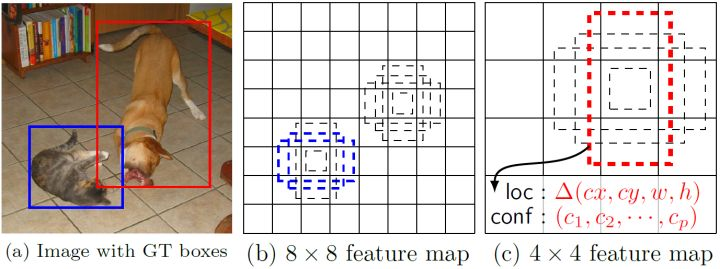
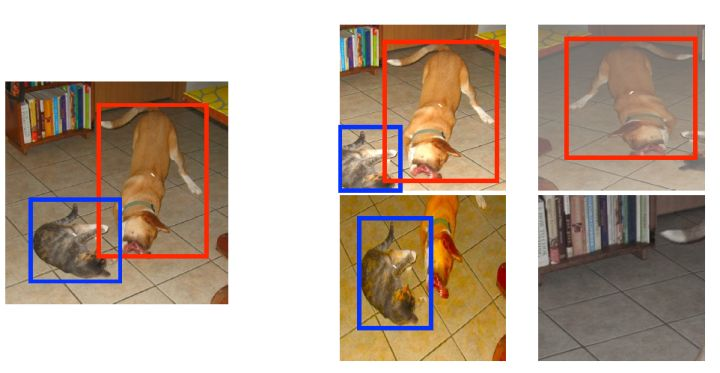
一般情况下,每个单元会设置多个default boxes,其尺度和长宽比存在差异,如下图所示,可以看到每个单元使用了4个不同的default boxes,图片中猫和狗分别采用最适合它们形状的先验框来进行训练,后面会详细讲解训练过程中的先验框匹配原则。
SSD的检测值也与YOLO不太一样,对于每个单元cell的每个先验框default box,其都输出一套独立的检测值,对于一个bouding box,主要分为两个部分:
- 第一个部分是各个类别的置信度或者评分
- 值得注意的是SSD将背景也当做了一个特殊的类别,如果检测目标共有c个类别,SSD其实需要预测c+1个置信度值,其中第一个置信度是不含目标或者属于背景的评分。后面当我们说c个类别置信度时,请记住里面包含背景那个特殊的类别,即真实的检测类别只有c-1个。
- 在预测过程中,置信度最高的那个类别就是边界框所属的类别。特别的,当第一个置信度最高时,表示边界框中并不包含目标。
- 第二个部分就是边界框的location,包含4个值
 ,分别表示边界框的中心坐标以及宽高。但是真实预测其实只是预测边界框相对于先验框的转换值(offset)。
,分别表示边界框的中心坐标以及宽高。但是真实预测其实只是预测边界框相对于先验框的转换值(offset)。
- 先验框(anchor)位置用
 表示,其对应预测的边界框用
表示,其对应预测的边界框用 表示,那么边界框的预测值l其实是b相对于d的转换值:
表示,那么边界框的预测值l其实是b相对于d的转换值: -

-

- 先验框(anchor)位置用
习惯上,我们称上面这个过程为边界框的编码(encode),预测时,你需要反向这个过程,即进行解码(decode),从预测值l中得到边界框的真实值b:


然而,在SSD的caffe源码实现中还有trick,那就是设置variance超参数来调整检测值,通过bool参数variance_encoded_in_target来控制两种模式。当其为true时,表示variance(方差)被包含在预测值中,就是上面那种情况,如果是false(大部分采用这种方式,训练更容易),就需要手动设置超参数variance,用来对l的4个值进行放缩,此时边界框需要这样解码:


综上所述,对于一个大小 的特征图,共有m x n 个单元,每个单元设置的先验框数目记为k,那么每个单元共需要
的特征图,共有m x n 个单元,每个单元设置的先验框数目记为k,那么每个单元共需要 个预测值,所有的单元共需要
个预测值,所有的单元共需要 个预测值,由于SSD采用卷积做检测,所以就需要
个预测值,由于SSD采用卷积做检测,所以就需要 个卷积核来完成这个特征图的检测过程。(卷积核参数共享)。
个卷积核来完成这个特征图的检测过程。(卷积核参数共享)。
网络结构
SSD采用VGG16作为基础模型,然后在VGG16的基础上新增了卷几层来获得更多的特征图以用于检测。SSD网络结构如图所示:
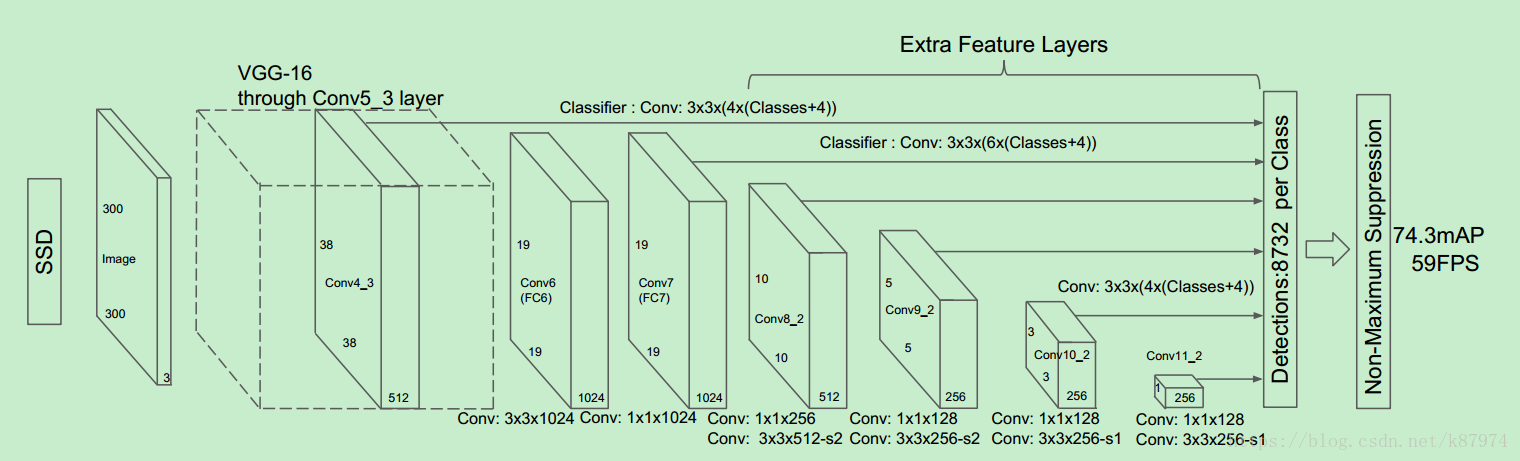
很明显可以看出SSD利用了多尺度的特征图做检测,模型的输入图片大小是 (还可以是
(还可以是 ),其与前者网络结构没有差别,只是最后新增一个卷积层。
),其与前者网络结构没有差别,只是最后新增一个卷积层。
采用VGG16做基础模型,首先VGG16是在ILSVRC CLS-LOC数据集预训练。然后借鉴了DeepLab-LargeFOV,分别将VGG16的全连接层fc6和fc7转换成 卷积层 conv6和
卷积层conv7,同时将池化层pool5由原来的stride=2的
变成stride=1的
(猜想是不想reduce特征图大小),为了配合这种变化,采用了一种Atrous Algorithm,其实就是conv6采用扩展卷积或带孔卷积(Dilation Conv),其在不增加参数与模型复杂度的条件下指数级扩大卷积的视野,其使用扩张率(dilation rate)参数,来表示扩张的大小,如下图6所示,(a)是普通的
卷积,其视野就是
,(b)是扩张率为1,此时视野变成
,(c)扩张率为3时,视野扩大为
,但是视野的特征更稀疏了。Conv6采用
大小但dilation rate=6的扩展卷积。

然后移除dropout层和fc8层,并新增一系列卷积层,在检测数据集上做finetuing。
其中VGG16中的Conv4_3层将作为用于检测的第一个特征图。conv4_3层特征图大小是 ,但是该层比较靠前,其norm(范数)较大,所以在其后面增加了一个L2 Normalization层(参见ParseNet),以保证和后面的检测层差异不是很大,这个和Batch Normalization层不太一样,其仅仅是对每个像素点在channle维度做归一化,而Batch Normalization层是在[batch_size, width, height]三个维度上做归一化。归一化后一般设置一个可训练的放缩变量gamma,使用TF可以这样简单实现:
1 # l2norm (not bacth norm, spatial normalization) 2 def l2norm(x, scale, trainable=True, scope="L2Normalization"): 3 n_channels = x.get_shape().as_list()[-1] 4 l2_norm = tf.nn.l2_normalize(x, [3], epsilon=1e-12) 5 with tf.variable_scope(scope): 6 gamma = tf.get_variable("gamma", shape=[n_channels, ], dtype=tf.float32, 7 initializer=tf.constant_initializer(scale), 8 trainable=trainable) 9 return l2_norm * gamma
从后面新增的卷积层中提取Conv7,Conv8_2,Conv9_2,Conv10_2,Conv11_2作为检测所用的特征图,加上Conv4_3层,共提取了6个特征图,其大小分别是 ,但是不同特征图单元cell设置的先验框数目不同(同一个特征图上每个单元设置的先验框是相同的,这里的数目指的是一个单元的先验框数目)。先验框的设置,包括尺度(或者说大小)和长宽比两个方面。对于先验框的尺度,其遵守一个线性递增规则:随着特征图大小降低,先验框尺度线性增加
每一个feature map中的每一个小格子(cell)都包含多个default box,同时每个box对应loc(位置坐标)和conf(每个种类的得分)。
default box长宽比例默认有四个和六个:
四个default box是长宽比(aspect ratios)为(1:1)、(2:1)、(1:2)、(1:1);六个则是添加了(1:3)、(3:1)
为什么会有两个(1:1)呢。这时候就要讲下论文中Choosing scales and aspect ratios for default boxes这段内容了。作者认为不同的feature map应该有不同的比例(一个大框一个小框,长宽比相同,大框是指不同feature map 相对于原图的尺寸比例不同),这是什么意思呢,代表的是default box中这个1在原图中的尺寸是多大的,计算公式如下所示:

Sk即代表在300*300输入中的比例,表示先验框大小相对于图片的比例
m为当前的feature map是第几层; m=5,因为一共有6个feature map,但是第一层(Conv4_3层)是单独设置的
k代表的是一共有多少层的feature map
Smin和Smax代表的是第一层和最后一层所占的比例,比例的最小值和最大值,在ssd300中为0.2-0.9。
计算:
第一个feature map 是 conv4_3:默认设置比例为0.2/2=0.1, 此时k=1
第二个feature map 是 conv7: k=2,s = 0.2 +(0.7/4) x (2-1) =0.375 ,最后300x0.375 = 112.5,这个就是在这个feature map中比例为1的这个default box 的尺寸相对于原图300x300 的大小。
为什么default box的size有两个1吗?
作者在这有引入了一个
,也就是每个特征图都设置了两个长宽比为1大小不同的正方形default box。有的小伙伴可能会有疑问,这有了Sk+1则需要多出来一部分的Sk啊,是的没错,最后一个特征图需要参考
来计算
,因此每个特征图(的每个cell)都有6个default box
(aspect ratios),但是在实现时, Conv4_3,Conv10_2,Conv11_2仅仅使用4个先验框(default box),不使用长宽比为3,1/3的先验框(default box)。作者的代码中就添加了两层,第一层取0.1,最后一层取1。
注:对于第一个特征图,先验框(default box)的尺度比例一般
,则尺度为300x0.1=30。
对于后面的特征图,先验框尺度比例按照上面公式线性增加,先将尺度比例放大100倍,然后再计算得到Sk,然后再将Sk除以100,再乘以图片大小,就可以得到各个特征图的先验框的size
那么S怎么用呢?按如下方式计算先验框的宽高(这里的Sk是上面求得的各个特征图的先验框的实际size,不再是尺度比例):
ar代表的是之前提到的default box(aspect ratios)比例,即
对于default box中心点的值取值为:
其中i,j代表在feature map中的水平和垂直的第几格
fk代表的是feature map的size
每个单元的先验框中心点分布在各单元的中心
得到特征图后,需要对特征图进行卷积得到检测结果,下图给出了一个5x5大小的特征图检测过程:
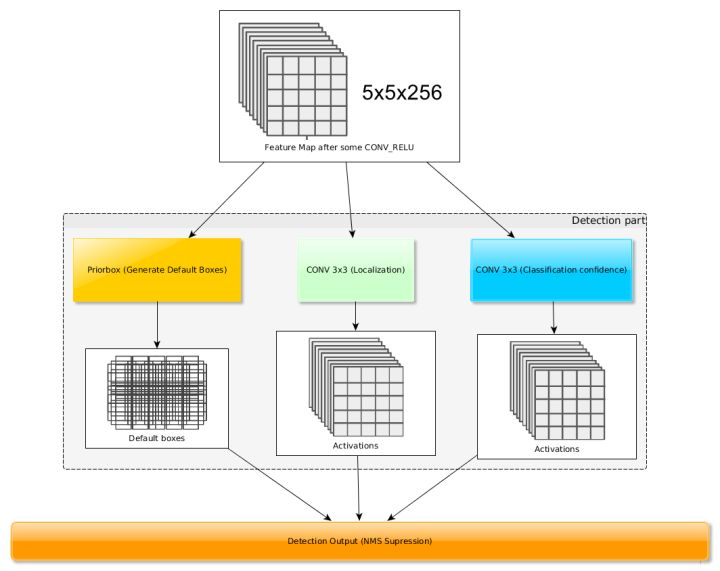
Priorbox是得到先验框,生成规则前面已经讲了。
检测值包含两个部分:类别置信度和边界框位置,各采用一次3x3卷积来进行完成。
是该特征图所采用的先验框数目,那么类别置信度需要的卷积核数量为
,而边界框位置需要的卷积核数量为
。由于每个先验框都会预测一个边界框,所以SSD300一共可以预测
Conv4_3 得到的feature map大小为38*38:38*38*4 = 5776
Conv7 得到的feature map大小为19*19:19*19*6 = 2166
Conv8_2 得到的feature map大小为10*10:10*10*6 = 600
Conv9_2 得到的feature map大小为5 * 5 :5 * 5 * 6 = 150
Conv10_2得到的feature map大小为3 * 3 :3 * 3 * 4 = 36
Conv11_2得到的feature map大小为1 * 1 :1 * 1 * 4 = 4
最后结果为:8732
个边界框,这是一个相当庞大的数字,所以说SSD本质上是密集采样。
训练过程
(1)先验框匹配
在训练过程中,首先要确定训练图片中的ground truth(真实目标)与哪个先验框来进行匹配,与之匹配的先验框所对应的边界框将负责预测它。
Yolo中,ground truth的中心落在哪个单元格,该单元格中与其IOU最大的边界框负责预测它。
SSD中,先验框与ground truth的匹配原则又两点:
1、每个ground truth找到与其IOU最大的先验框,互相匹配。该先验框称为正样本(先验框对应的预测box)
若有个先验框没有与ground truth匹配,就只能与背景匹配,就是负样本。(一个图片中ground truth少,但先验框多,这样匹配,很多先验框会是负样本,正负样本不均衡)。
2、对剩余未匹配先验框,若某个ground truth的IOU大于某个阈值(一般是0.5),那么该先验框也与这个ground truth进行匹配。
这样ground truth可能与多个先验框匹配
FP:负样本 TP:正样本
尽管一个ground truth可以与多个先验框匹配,但是ground truth相对于先验框还是太少了,所以负样本会很多。为保证正负样本尽量均衡,SSD采用了hard negative mining,先将每一个物体位置上对应 predictions(default boxes)是 negative 的 boxes 进行排序,按照 default boxes 的 confidence 的大小。 选择最高的几个,保证最后 negatives、positives 的比例接近3:1
(2)损失函数
损失函数定义为位置误差(locatization loss, loc)与置信度误差(confidence loss, conf)的加权和:
其中
是先验框的正样本数量。
这里
为一个指示参数,当
时表示第
个先验框与第
个ground truth匹配,并且ground truth的类别为
。
为类别置信度预测值。
为先验框的所对应边界框的位置预测值
是ground truth的位置参数
对于位置误差,其采用Smooth L1 loss,定义如下:

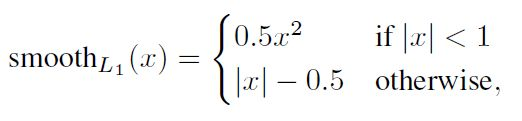
由于
的存在,所以位置误差仅针对正样本进行计算。值得注意的是,要先对ground truth的
,因为预测值
对于置信度误差,其采用softmax loss:

权重系数 通过交叉验证设置为1。
(3)数据扩增
采用数据扩增(Data Augmentation)可以提升SSD的性能,主要采用的技术有水平翻转(horizontal flip),随机裁剪加颜色扭曲(random crop & color distortion),随机采集块域(Randomly sample a patch)(获取小目标训练样本),如下图所示:
预测过程
确定预测框类别(置信度最大者)与置信度值,并且过滤掉属于背景的预测框,过滤掉置信度阈值较低的预测框;
对留下的预测框进行编码,得到真实的位置参数(解码后还需要clip,防止预测框位置超出图片);
解码之后,根据置信度进行降序排列,保留top-k个预测框;
进行NMS算法,过滤掉那些重叠度比较大的预测框,最后剩余的预测框就是检测结果了。
性能评估
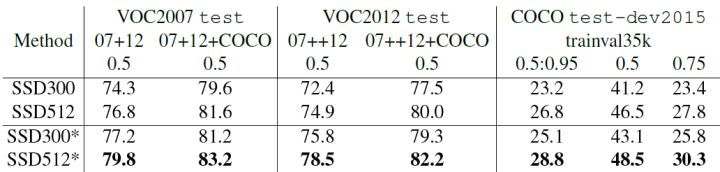
首先整体看一下SSD在VOC2007,VOC2012及COCO数据集上的性能,如表1所示。相比之下,SSD512的性能会更好一些。加*的表示使用了image expansion data augmentation(通过zoom out来创造小的训练样本)技巧来提升SSD在小目标上的检测效果,所以性能会有所提升。
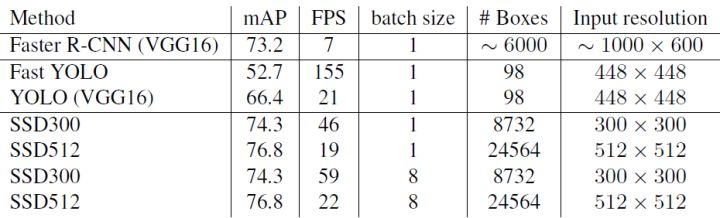
SSD与其它检测算法的对比结果(在VOC2007数据集)如表2所示,基本可以看到,SSD与Faster R-CNN有同样的准确度,并且与Yolo具有同样较快地检测速度。
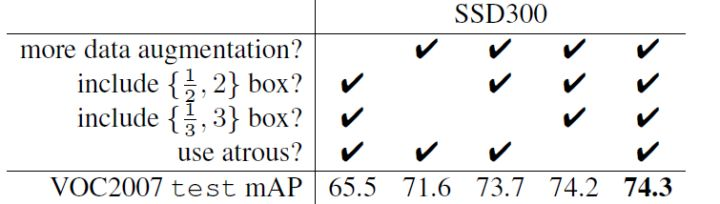
文章还对SSD的各个trick做了更为细致的分析,表3为不同的trick组合对SSD的性能影响,从表中可以得出如下结论:
- 数据扩增技术很重要,对于mAP的提升很大;
- 使用不同长宽比的先验框可以得到更好的结果;
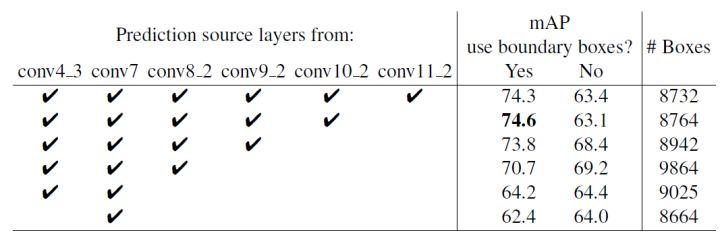
同样的,采用多尺度的特征图用于检测也是至关重要的,这可以从表4中看出:
补充
1、L2 normalization
2、hard nevigating mining

