神经网络基础篇:梯度下降法(Gradient Descent)
梯度下降法
梯度下降法可以做什么?
在 测试集上,通过最小化代价函数(成本函数)\(J(w,b)\)来训练的参数\(w\)和\(b\),
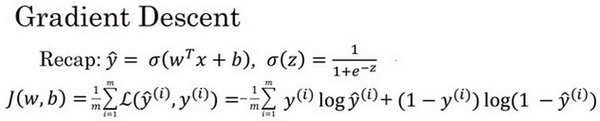
如图,在第二行给出和之前一样的逻辑回归算法的代价函数(成本函数)
梯度下降法的形象化说明
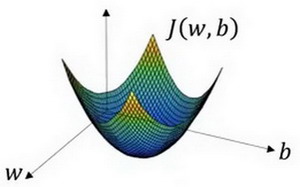
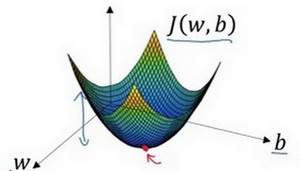
在这个图中,横轴表示 的空间参数\(w\)和\(b\),在实践中,\(w\)可以是更高的维度,但是为了更好地绘图, 定义\(w\)和\(b\),都是单一实数,代价函数(成本函数)\(J(w,b)\)是在水平轴\(w\)和\(b\)上的曲面,因此曲面的高度就是\(J(w,b)\)在某一点的函数值。 所做的就是找到使得代价函数(成本函数)\(J(w,b)\)函数值是最小值,对应的参数\(w\)和\(b\)。
如图,代价函数(成本函数)\(J(w,b)\)是一个凸函数(convex function),像一个大碗一样。
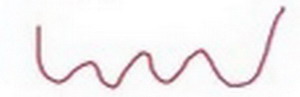
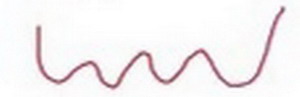
如图,这就与刚才的图有些相反,因为它是非凸的并且有很多不同的局部最小值。由于逻辑回归的代价函数(成本函数)\(J(w,b)\)特性, 必须定义代价函数(成本函数)\(J(w,b)\)为凸函数。
初始化\(w\)和\(b\),
可以用如图那个小红点来初始化参数\(w\)和\(b\),也可以采用随机初始化的方法,对于逻辑回归几乎所有的初始化方法都有效,因为函数是凸函数,无论在哪里初始化,应该达到同一点或大致相同的点。

以如图的小红点的坐标来初始化参数\(w\)和\(b\)。
2. 朝最陡的下坡方向走一步,不断地迭代

朝最陡的下坡方向走一步,如图,走到了如图中第二个小红点处。
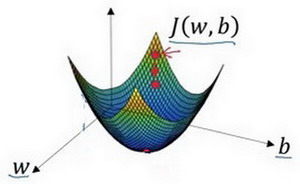
可能停在这里也有可能继续朝最陡的下坡方向再走一步,如图,经过两次迭代走到第三个小红点处。
3.直到走到全局最优解或者接近全局最优解的地方
通过以上的三个步骤 可以找到全局最优解,也就是代价函数(成本函数)\(J(w,b)\)这个凸函数的最小值点。
梯度下降法的细节化说明(仅有一个参数)

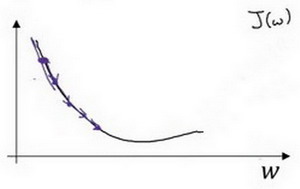
假定代价函数(成本函数)\(J(w)\) 只有一个参数\(w\),即用一维曲线代替多维曲线,这样可以更好画出图像。


迭代就是不断重复做如图的公式:
\(:=\)表示更新参数,
$a $ 表示学习率(learning rate),用来控制步长(step),即向下走一步的长度\(\frac{dJ(w)}{dw}\) 就是函数\(J(w)\)对\(w\) 求导(derivative),在代码中 会使用\(dw\)表示这个结果
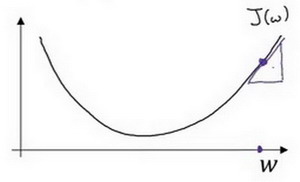
对于导数更加形象化的理解就是斜率(slope),如图该点的导数就是这个点相切于 \(J(w)\)的小三角形的高除宽。假设 以如图点为初始化点,该点处的斜率的符号是正的,即\(\frac{dJ(w)}{dw}>0\),所以接下来会向左走一步。

梯度下降
整个梯度下降法的迭代过程就是不断地向左走,直至逼近最小值点。
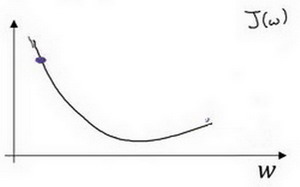
假设 以如图点为初始化点,该点处的斜率的符号是负的,即\(\frac{dJ(w)}{dw}<0\),所以接下来会向右走一步。
整个梯度下降法的迭代过程就是不断地向右走,即朝着最小值点方向走。
梯度下降法的细节化说明(两个参数)
逻辑回归的代价函数(成本函数)\(J(w,b)\)是含有两个参数的。
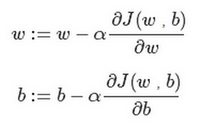
$\partial $ 表示求偏导符号,可以读作round,
\(\frac{\partial J(w,b)}{\partial w}\) 就是函数\(J(w,b)\) 对\(w\) 求偏导,在代码中 会使用\(dw\) 表示这个结果,
\(\frac{\partial J(w,b)}{\partial b}\) 就是函数\(J(w,b)\)对\(b\) 求偏导,在代码中 会使用\(db\) 表示这个结果,
小写字母\(d\) 用在求导数(derivative),即函数只有一个参数,
偏导数符号$\partial $ 用在求偏导(partial derivative),即函数含有两个以上的参数。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号