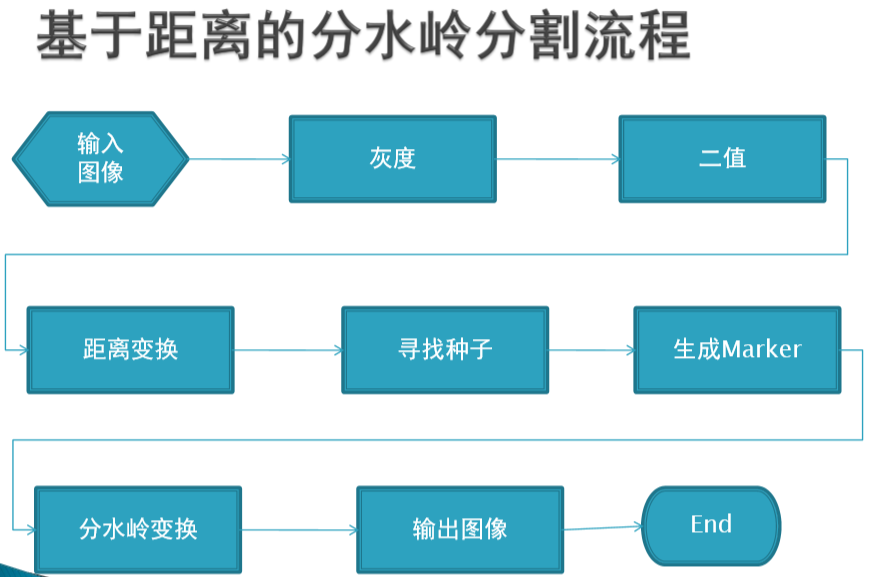
分水岭分割方法原理 (3种)
- 基于浸泡理论的分水岭分割方法 (距离)
- 基于连通图的方法
- 基于距离变换的方法
图像形态学操作:
- 腐蚀与膨胀
- 开闭操作
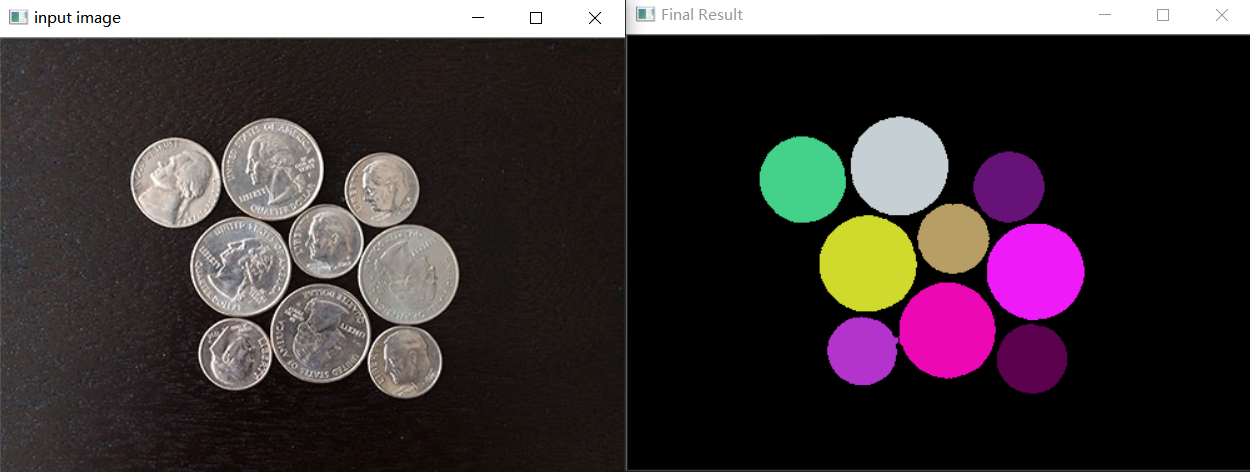
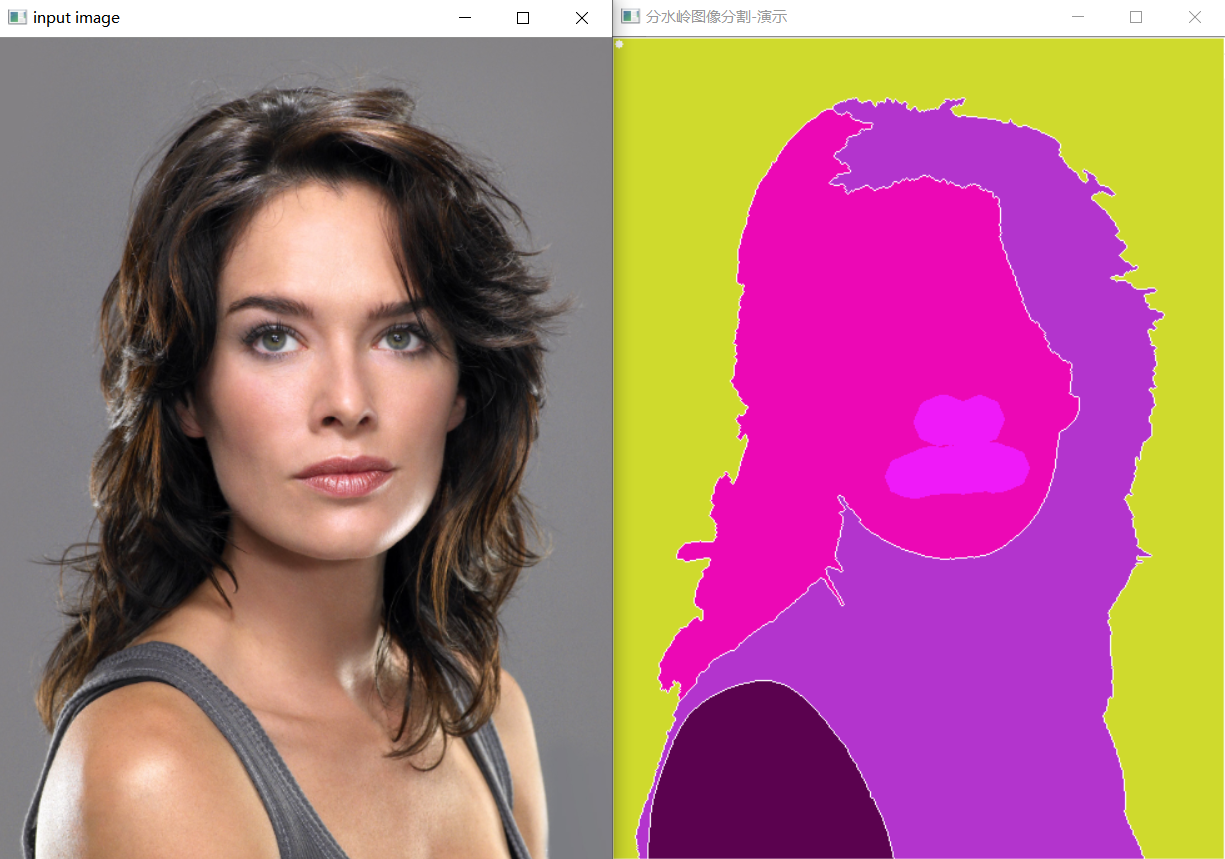
分水岭算法运用
- 分割粘连对象,实现形态学操作与对象计数
- 图像分割
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
int main(int argc, char** argv) {
Mat src = imread("D:/images/coins_001.jpg");
if (src.empty()) {
printf("could not load image...\n");
return -1;
}
namedWindow("input image", CV_WINDOW_AUTOSIZE);
imshow("input image", src);
Mat gray, binary, shifted;
pyrMeanShiftFiltering(src, shifted, 21, 51);
//imshow("shifted", shifted);
//灰度
cvtColor(shifted, gray, COLOR_BGR2GRAY);
threshold(gray, binary, 0, 255, THRESH_BINARY | THRESH_OTSU);
//imshow("binary", binary);
// 距离变换
Mat dist;
distanceTransform(binary, dist, DistanceTypes::DIST_L2, 3, CV_32F);
normalize(dist, dist, 0, 1, NORM_MINMAX);
//imshow("distance result", dist);
// 二值化
threshold(dist, dist, 0.4, 1, THRESH_BINARY);
//imshow("distance binary", dist);
// markers
Mat dist_m;
dist.convertTo(dist_m, CV_8U);
vector<vector<Point>> contours;
findContours(dist_m, contours, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE, Point(0, 0));
// create markers
Mat markers = Mat::zeros(src.size(), CV_32SC1);
for (size_t t = 0; t < contours.size(); t++) {
drawContours(markers, contours, static_cast<int>(t), Scalar::all(static_cast<int>(t) + 1), -1);
}
circle(markers, Point(5, 5), 3, Scalar(255), -1);
//imshow("markers", markers*10000);
// 形态学操作 - 彩色图像,目的是去掉干扰,让结果更好
Mat k = getStructuringElement(MORPH_RECT, Size(3, 3), Point(-1, -1));
morphologyEx(src, src, MORPH_ERODE, k);
// 完成分水岭变换
watershed(src, markers);
Mat mark = Mat::zeros(markers.size(), CV_8UC1);
markers.convertTo(mark, CV_8UC1);
bitwise_not(mark, mark, Mat());
//imshow("watershed result", mark);
// generate random color
vector<Vec3b> colors;
for (size_t i = 0; i < contours.size(); i++) {
int r = theRNG().uniform(0, 255);
int g = theRNG().uniform(0, 255);
int b = theRNG().uniform(0, 255);
colors.push_back(Vec3b((uchar)b, (uchar)g, (uchar)r));
}
// 颜色填充与最终显示
Mat dst = Mat::zeros(markers.size(), CV_8UC3);
int index = 0;
for (int row = 0; row < markers.rows; row++) {
for (int col = 0; col < markers.cols; col++) {
index = markers.at<int>(row, col);
if (index > 0 && index <= contours.size()) {
dst.at<Vec3b>(row, col) = colors[index - 1];
}
else {
dst.at<Vec3b>(row, col) = Vec3b(0, 0, 0);
}
}
}
imshow("Final Result", dst);
printf("number of objects : %d\n", contours.size());
waitKey(0);
return 0;
}
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
Mat watershedCluster(Mat &image, int &numSegments);
void createDisplaySegments(Mat &segments, int numSegments, Mat &image);
int main(int argc, char** argv) {
Mat src = imread("D:/images/cvtest.png");
if (src.empty()) {
printf("could not load image...\n");
return -1;
}
namedWindow("input image", CV_WINDOW_AUTOSIZE);
imshow("input image", src);
int numSegments;
Mat markers = watershedCluster(src, numSegments);
createDisplaySegments(markers, numSegments, src);
waitKey(0);
return 0;
}
Mat watershedCluster(Mat &image, int &numComp) {
// 二值化
Mat gray, binary;
cvtColor(image, gray, COLOR_BGR2GRAY);
//阈值
threshold(gray, binary, 0, 255, THRESH_BINARY | THRESH_OTSU);
// 形态学与距离变换
Mat k = getStructuringElement(MORPH_RECT, Size(3, 3), Point(-1, -1));
morphologyEx(binary, binary, MORPH_OPEN, k, Point(-1, -1));
Mat dist;
distanceTransform(binary, dist, DistanceTypes::DIST_L2, 3, CV_32F);
normalize(dist, dist, 0.0, 1.0, NORM_MINMAX);
// 开始生成标记
threshold(dist, dist, 0.1, 1.0, THRESH_BINARY);
normalize(dist, dist, 0, 255, NORM_MINMAX);
dist.convertTo(dist, CV_8UC1);
// 标记开始
vector<vector<Point>> contours;
vector<Vec4i> hireachy;
findContours(dist, contours, hireachy, RETR_CCOMP, CHAIN_APPROX_SIMPLE);
if (contours.empty()) {
return Mat();
}
Mat markers(dist.size(), CV_32S);
markers = Scalar::all(0);
for (int i = 0; i < contours.size(); i++) {
drawContours(markers, contours, i, Scalar(i + 1), -1, 8, hireachy, INT_MAX);
}
//填充
circle(markers, Point(5, 5), 3, Scalar(255), -1);
// 分水岭变换
watershed(image, markers);
numComp = contours.size();
return markers;
}
void createDisplaySegments(Mat &markers, int numSegments, Mat &image) {
// generate random color
vector<Vec3b> colors;
for (size_t i = 0; i < numSegments; i++) {
int r = theRNG().uniform(0, 255);
int g = theRNG().uniform(0, 255);
int b = theRNG().uniform(0, 255);
colors.push_back(Vec3b((uchar)b, (uchar)g, (uchar)r));
}
// 颜色填充与最终显示
Mat dst = Mat::zeros(markers.size(), CV_8UC3);
int index = 0;
for (int row = 0; row < markers.rows; row++) {
for (int col = 0; col < markers.cols; col++) {
index = markers.at<int>(row, col);
if (index > 0 && index <= numSegments) {
dst.at<Vec3b>(row, col) = colors[index - 1];
}
else {
dst.at<Vec3b>(row, col) = Vec3b(255, 255, 255);
}
}
}
imshow("分水岭图像分割-演示", dst);
return;
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号