#include <opencv2/opencv.hpp>
#include <iostream>
#include <math.h>
using namespace cv;
using namespace std;
int main(int argc, char** argv) {
Mat src = imread("D:/case6.png");
if (src.empty()) {
printf("could not load image...\n");
return 0;
}
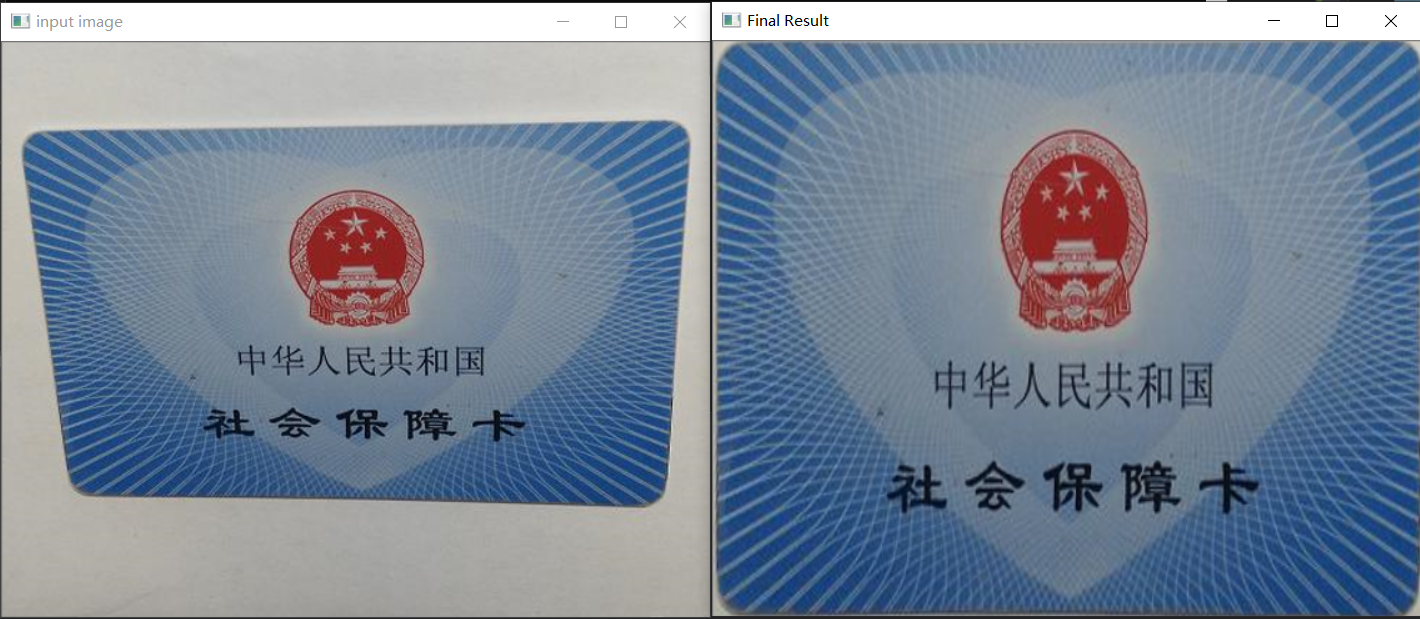
namedWindow("input image", CV_WINDOW_AUTOSIZE);
imshow("input image", src);
// 二值处理 取反
Mat gray_src, binary, dst;
cvtColor(src, gray_src, COLOR_BGR2GRAY);
threshold(gray_src, binary, 0, 255, THRESH_BINARY_INV | THRESH_OTSU);
//imshow("binary image", binary);
// 形态学操作
Mat kernel = getStructuringElement(MORPH_RECT, Size(5, 5), Point(-1, -1));
morphologyEx(binary, dst, MORPH_CLOSE, kernel, Point(-1, -1), 3);
//imshow("morphology", dst);
// 轮廓发现
bitwise_not(dst, dst, Mat());
vector<vector<Point>> contours;
vector<Vec4i> hireachy;
findContours(dst, contours, hireachy, CV_RETR_TREE, CHAIN_APPROX_SIMPLE, Point());
// 轮廓绘t制
int width = src.cols;
int height = src.rows;
Mat drawImage = Mat::zeros(src.size(), CV_8UC3);
for (size_t t = 0; t < contours.size(); t++) {
Rect rect = boundingRect(contours[t]);
if (rect.width > width / 2 && rect.width < width - 5) {
drawContours(drawImage, contours, static_cast<int>(t), Scalar(0, 0, 255), 2, 8, hireachy, 0, Point());
}
}
//imshow("contours", drawImage);
vector<Vec4i> lines;
Mat contoursImg;
int accu = min(width*0.5, height*0.5);
cvtColor(drawImage, contoursImg, COLOR_BGR2GRAY);
HoughLinesP(contoursImg, lines, CV_HOUGH_PROBABILISTIC, CV_PI / 200.0, accu, accu, 0);
Mat linesImage = Mat::zeros(src.size(), CV_8UC3);
for (size_t t = 0; t < lines.size(); t++) {
Vec4i ln = lines[t];
line(linesImage, Point(ln[0], ln[1]), Point(ln[2], ln[3]), Scalar(0, 0, 255), 2, 8, 0);
}
printf("number of lines : %d\n", lines.size());
//imshow("lines image", linesImage);
// 寻找与定位上下左右四条直线
int deltah = 0;
Vec4i topLine, bottomLine;
Vec4i leftLine, rightLine;
for (int i = 0; i < lines.size(); i++) {
Vec4i ln = lines[i];
deltah = abs(ln[3] - ln[1]);
if (ln[3] < height / 2.0 && ln[1] < height / 2.0 && deltah < accu - 1) {
if (topLine[3] > ln[3] && topLine[3] > 0) {
topLine = lines[i];
}
else {
topLine = lines[i];
}
}
if (ln[3] > height / 2.0 && ln[1] > height / 2.0 && deltah < accu - 1) {
bottomLine = lines[i];
}
if (ln[0] < width / 2.0 && ln[2] < width / 2.0) {
leftLine = lines[i];
}
if (ln[0] > width / 2.0 && ln[2] > width / 2.0) {
rightLine = lines[i];
}
}
cout << "top line : p1(x, y) = " << topLine[0] << "," << topLine[1] << " p2(x, y) = " << topLine[2] << "," << topLine[3] << endl;
cout << "bottom line : p1(x, y) = " << bottomLine[0] << "," << bottomLine[1] << " p2(x, y) = " << bottomLine[2] << "," << bottomLine[3] << endl;
cout << "left line : p1(x, y) = " << leftLine[0] << "," << leftLine[1] << " p2(x, y) = " << leftLine[2] << "," << leftLine[3] << endl;
cout << "right line : p1(x, y) = " << rightLine[0] << "," << rightLine[1] << " p2(x, y) = " << rightLine[2] << "," << rightLine[3] << endl;
// 拟合四条直线方程,求直线相交的点
float k1, c1;
k1 = float(topLine[3] - topLine[1]) / float(topLine[2] - topLine[0]);
c1 = topLine[1] - k1 * topLine[0];
float k2, c2;
k2 = float(bottomLine[3] - bottomLine[1]) / float(bottomLine[2] - bottomLine[0]);
c2 = bottomLine[1] - k2 * bottomLine[0];
float k3, c3;
k3 = float(leftLine[3] - leftLine[1]) / float(leftLine[2] - leftLine[0]);
c3 = leftLine[1] - k3 * leftLine[0];
float k4, c4;
k4 = float(rightLine[3] - rightLine[1]) / float(rightLine[2] - rightLine[0]);
c4 = rightLine[1] - k4 * rightLine[0];
// 四条直线交点
Point p1; // 左上角
p1.x = static_cast<int>((c1 - c3) / (k3 - k1));
p1.y = static_cast<int>(k1*p1.x + c1);
Point p2; // 右上角
p2.x = static_cast<int>((c1 - c4) / (k4 - k1));
p2.y = static_cast<int>(k1*p2.x + c1);
Point p3; // 左下角
p3.x = static_cast<int>((c2 - c3) / (k3 - k2));
p3.y = static_cast<int>(k2*p3.x + c2);
Point p4; // 右下角
p4.x = static_cast<int>((c2 - c4) / (k4 - k2));
p4.y = static_cast<int>(k2*p4.x + c2);
cout << "p1(x, y)=" << p1.x << "," << p1.y << endl;
cout << "p2(x, y)=" << p2.x << "," << p2.y << endl;
cout << "p3(x, y)=" << p3.x << "," << p3.y << endl;
cout << "p4(x, y)=" << p4.x << "," << p4.y << endl;
// 显示四个点坐标
circle(linesImage, p1, 2, Scalar(255, 0, 0), 2, 8, 0);
circle(linesImage, p2, 2, Scalar(255, 0, 0), 2, 8, 0);
circle(linesImage, p3, 2, Scalar(255, 0, 0), 2, 8, 0);
circle(linesImage, p4, 2, Scalar(255, 0, 0), 2, 8, 0);
line(linesImage, Point(topLine[0], topLine[1]), Point(topLine[2], topLine[3]), Scalar(0, 255, 0), 2, 8, 0);
//imshow("four corners", linesImage);
// 透视变换
vector<Point2f> src_corners(4);
src_corners[0] = p1;
src_corners[1] = p2;
src_corners[2] = p3;
src_corners[3] = p4;
vector<Point2f> dst_corners(4);
dst_corners[0] = Point(0, 0);
dst_corners[1] = Point(width, 0);
dst_corners[2] = Point(0, height);
dst_corners[3] = Point(width, height);
// 获取透视变换矩阵
Mat resultImage;
Mat warpmatrix = getPerspectiveTransform(src_corners, dst_corners);
warpPerspective(src, resultImage, warpmatrix, resultImage.size(), INTER_LINEAR);
namedWindow("Final Result", CV_WINDOW_AUTOSIZE);
imshow("Final Result", resultImage);
waitKey(0);
return 0;
}


 浙公网安备 33010602011771号
浙公网安备 33010602011771号