opencv::模板匹配(Template Match)
模板匹配介绍 模板匹配就是在整个图像区域发现与给定子图像匹配的小块区域。 所以模板匹配首先需要一个模板图像T(给定的子图像) 另外需要一个待检测的图像-源图像S 工作方法,在带检测图像上,从左到右,从上向下计算模板图像与重叠子图像的匹配度,匹配程度越大,两者相同的可能性越大。

OpenCV中提供了六种常见的匹配算法如下:
1、计算平方不同
![]()
2、计算相关性
![]()
3、计算相关系数
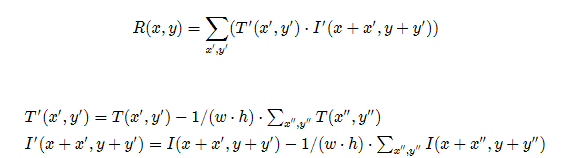
模板匹配介绍 – 匹配算法介绍
1、计算归一化平方不同

2、计算归一化相关性

3、计算归一化相关系数
![]()
matchTemplate( InputArray image, // 源图像,必须是8-bit或者32-bit浮点数图像 InputArray templ, // 模板图像,类型与输入图像一致 OutputArray result, // 输出结果,必须是单通道32位浮点数,假设源图像WxH,模板图像wxh, 则结果必须为W-w+1, H-h+1的大小。 int method, // 使用的匹配方法 InputArray mask=noArray() //(optional) )
Mat src, temp, dst; int match_method = TM_SQDIFF; int max_track = 5; void Match_Demo(int, void*); int main(int argc, char** argv) { src = imread(STRPAHT2); temp = imread(STRPAHT3); if (src.empty() || temp.empty()) { printf("could not load image...\n"); return -1; } imshow("INPUT_T", src); createTrackbar("Match Algo Type:", "OUTPUT_T", &match_method, max_track, Match_Demo); Match_Demo(0, 0); waitKey(0); return 0; } void Match_Demo(int, void*) { int width = src.cols - temp.cols + 1; int height = src.rows - temp.rows + 1; Mat result(width, height, CV_32FC1); matchTemplate(src, temp, result, match_method, Mat()); normalize(result, result, 0, 1, NORM_MINMAX, -1, Mat()); Point minLoc; Point maxLoc; double min, max; src.copyTo(dst); Point temLoc; minMaxLoc(result, &min, &max, &minLoc, &maxLoc, Mat()); if (match_method == TM_SQDIFF || match_method == TM_SQDIFF_NORMED) { temLoc = minLoc; } else { temLoc = maxLoc; } rectangle(dst, Rect(temLoc.x, temLoc.y, temp.cols, temp.rows), Scalar(0, 0, 255), 2, 8); rectangle(result, Rect(temLoc.x, temLoc.y, temp.cols, temp.rows), Scalar(0, 0, 255), 2, 8); imshow("OUTPUT_T", result); imshow("match_t", dst); }

 浙公网安备 33010602011771号
浙公网安备 33010602011771号