
opencv::霍夫圆变换
霍夫圆检测原理
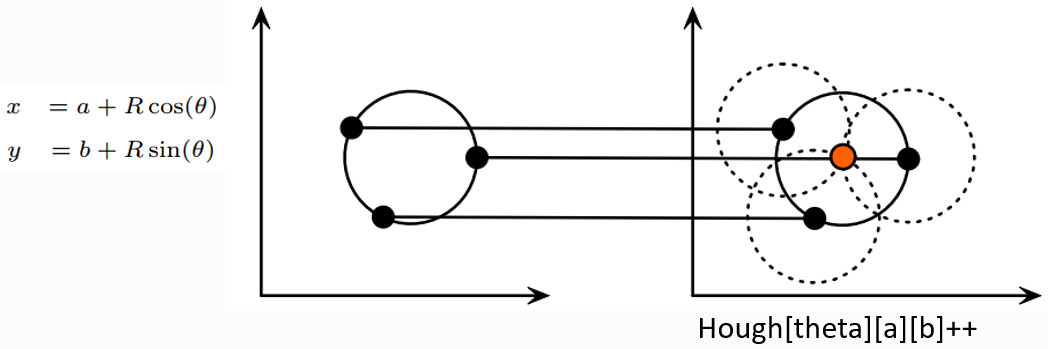
从平面坐标到极坐标转换三个参数![]()
假设平面坐标的任意一个圆上的点,转换到极坐标中:
 处有最大值,霍夫变换正是利用这个原理实现圆的检测。
处有最大值,霍夫变换正是利用这个原理实现圆的检测。
cv::HoughCircles 因为霍夫圆检测对噪声比较敏感,所以首先要对图像做中值滤波。 基于效率考虑,Opencv中实现的霍夫变换圆检测是基于图像梯度的实现,分为两步: 1. 检测边缘,发现可能的圆心 2. 基于第一步的基础上从候选圆心开始计算最佳半径大小
HoughCircles( InputArray image, // 输入图像 ,必须是8位的单通道灰度图像 OutputArray circles, // 输出结果,发现的圆信息 Int method, // 方法 - HOUGH_GRADIENT Double dp, // dp = 1; Double mindist, // 10 最短距离-可以分辨是两个圆的,否则认为是同心圆- src_gray.rows/8 Double param1, // canny edge detection low threshold Double param2, // 中心点累加器阈值 – 候选圆心 Int minradius, // 最小半径 Int maxradius //最大半径 )
int main(int argc, char** argv) { Mat src, dst; src = imread(STRPAHT3); if (!src.data) { printf("could not load image...\n"); return -1; } Mat moutput; //中值滤波medianBlur medianBlur(src, moutput, 3); cvtColor(moutput, moutput, CV_BGR2GRAY); //基于灰度空间 vector<Vec3f> pcircles; HoughCircles(moutput, pcircles, CV_HOUGH_GRADIENT, 1, 10, 100, 30, 5, 50); src.copyTo(dst); //重新传回rgb色彩空间 cvtColor(dst, dst, CV_BGR2GRAY); for (size_t i = 0; i < pcircles.size(); i++) { Vec3f cc = pcircles[i]; circle(dst, Point(cc[0], cc[1]), cc[2], Scalar(0, 0, 255), 2, LINE_AA); circle(dst, Point(cc[0], cc[1]), 2, Scalar(198, 23, 155), 2, LINE_AA); } imshow("OUTPUT_TITLE", dst); waitKey(0); }

 浙公网安备 33010602011771号
浙公网安备 33010602011771号