opencv::自定义线性滤波
卷积概念
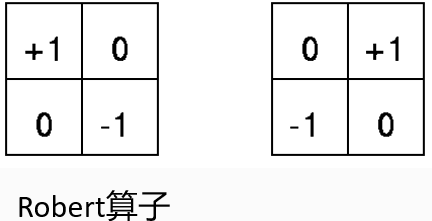
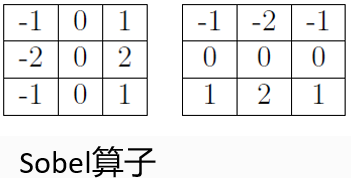
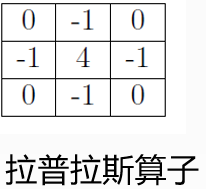
常见算子
自定义卷积模糊
卷积概念
1、卷积是图像处理中一个操作,是kernel在图像的每个像素上的操作。
2、Kernel本质上一个固定大小的矩阵数组,其中心点称为锚点(anchor point)。

3、把kernel放到像素数组之上,求锚点周围覆盖的像素乘积之和(包括锚点),用来替换锚点覆盖下像素点值称为卷积处理。

常见算子
自定义卷积模糊 filter2D( Mat src, // 输入图像 Mat dst, // 模糊图像 int depth, // 图像深度32/8 Mat kernel, // 卷积核/模板 Point anchor, // 锚点位置 double delta // 计算出来的像素+delta )
int main(int argc, char** argv) { Mat src, dst; int ksize = 0; src = imread(STRPAHT2); if (!src.data) { printf("could not load image...\n"); return -1; } // Sobel X 方向 // Mat kernel_x = (Mat_<int>(3, 3) << -1, 0, 1, -2,0,2, -1, 0, 1); // filter2D(src, dst, -1, kernel_x, Point(-1, -1), 0.0); //imshow("Sobel X", dst); // Sobel Y 方向 //Mat kernel_y = (Mat_<int>(3, 3) << -1, -2, -1, 0,0,0, 1,2,1); //filter2D(src, dst, -1, kernel_y, Point(-1, -1), 0.0); //imshow("Sobel X", dst); // 拉普拉斯算子 // Mat kernel_y = (Mat_<int>(3, 3) << 0, -1, 0, -1, 4, -1, 0, -1, 0); // filter2D(src, dst, -1, kernel_y, Point(-1, -1), 0.0); //imshow("Sobel K_Y", dst); int c = 0; int index = 0; while (true) { c = waitKey(500); if ((char)c == 27) {// ESC break; } ksize = 5 + (index % 8) * 2; Mat kernel = Mat::ones(Size(ksize, ksize), CV_32F) / (float)(ksize * ksize); filter2D(src, dst, -1, kernel, Point(-1, -1)); index++; imshow("OUTPUT_WIN", dst); } waitKey(0); return 0; }

 浙公网安备 33010602011771号
浙公网安备 33010602011771号