上次是英语那这次就是C++
动量(线动量)
定义:
{ → F d t = d → P ∫ t 2 t 1 → F d t = → P t − → P 0 → I = Δ → P = ∫ t 2 t 1 → F d t { F → d t = d P → ∫ t 1 t 2 F → d t = P t → − P 0 → I → = Δ P → = ∫ t 1 t 2 F → d t
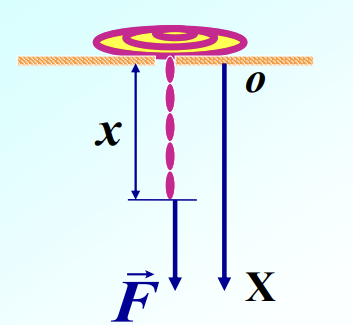
以火箭飞行原理为简单模型举例,分析一个通过将自身一部分物体向反方向给予一初速度(即喷气)的火箭的运动状态。假设 t t m m t t t + d t t + d t
{ → P 1 = m → v → P 2 = ( m + d m ) ( → v + d → v ) + ( − d m ) → v ′ { P 1 → = m v → P 2 → = ( m + d m ) ( v → + d v → ) + ( − d m ) v → ′
由动量定理,得
→ F d t = → P 2 − → P 1 → F d t = ( m + d m ) ( → v + d → v ) + ( − d m ) → v ′ − m → v → F = d ( m → v ) d t − → v ′ d m d t F → d t = P 2 → − P 1 → F → d t = ( m + d m ) ( v → + d v → ) + ( − d m ) v → ′ − m v → F → = d ( m v → ) d t − v → ′ d m d t
(其中 d m d → v d m d v → → u = → v ′ − → v u → = v → ′ − v →
→ F = → v d m + m d → v d t − → v ′ d m d t → F = m d → v d t − → u d m d t F → = v → d m + m d v → d t − v → ′ d m d t F → = m d v → d t − u → d m d t
此即为密歇尔斯基方程。L L M M t = 0 t = 0 0 0
{ → F = m x → g = M L x → g F = d ( m x v ) d t ∴ M L x g = d ( M L x v ) d t x g d t = d ( x v ) 左 右 同 乘 x v 得 x 2 v g ⋅ d t = 1 2 d ( x 2 v 2 ) ∵ v = d x d t ∴ x 2 v g d t = x 2 d x d t g d t = x 2 g d x ∴ ∫ L 2 v 2 末 0 1 2 d ( x 2 v 2 ) = ∫ L 0 x 2 g d x 1 2 L 2 v 2 末 = 1 3 g L 3 v 末 = √ 2 3 g L { F → = m x g → = M L x g → F = d ( m x v ) d t ∴ M L x g = d ( M L x v ) d t x g d t = d ( x v ) 左 右 同 乘 x v 得 x 2 v g ⋅ d t = 1 2 d ( x 2 v 2 ) ∵ v = d x d t ∴ x 2 v g d t = x 2 d x d t g d t = x 2 g d x ∴ ∫ 0 L 2 v 末 2 1 2 d ( x 2 v 2 ) = ∫ 0 L x 2 g d x 1 2 L 2 v 末 2 = 1 3 g L 3 v 末 = 2 3 g L
这一计算方式直观但较为复杂,如果应用密歇尔斯基方程求解,则可以简化一些。→ u u → → u = − → v u → = − v →
F = m d v d t + v d m d t = d ( m v ) d t = d ( M L x v ) d t F = m d v d t + v d m d t = d ( m v ) d t = d ( M L x v ) d t
剩下的部分就和第一种解法一致了。好吧好像也没简化到哪去
角动量
定义
⎧ ⎪ ⎨ ⎪ ⎩ → L = → r × → P 角 动 量 → P = m → v 线 动 量 → M = → r × → F 力 矩 { L → = r → × P → 角 动 量 P → = m v → 线 动 量 M → = r → × F → 力 矩
( → r r →
d → L d t = d ( → r × → P ) d t = d → r d t × → P + → r × d → P d t ∵ d → r d t × → P = → v × m → v = 0 ∴ d → L d t = → r × d → P d t = → r × → F = → M d L → d t = d ( r → × P → ) d t = d r → d t × P → + r → × d P → d t ∵ d r → d t × P → = v → × m v → = 0 ∴ d L → d t = r → × d P → d t = r → × F → = M →
由此得到微分形式和积分形式的角动量定理
{ → M d t = d → L ∫ t 0 → M d t = ∫ → L t → L 0 d L = → L t − → L 0 { M → d t = d L → ∫ 0 t M → d t = ∫ L 0 → L t → d L = L t → − L 0 →
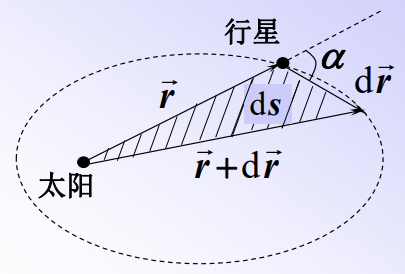
基础应用:证明开普勒第二定律,即行星与太阳的连线在相同时间内扫过相等的面积。→ r r → → F F → → r × → v r → × v →
d s = 1 2 r | d → r | s i n α = 1 2 | → r × d → r | 又 ∵ d → r = → v d t ∴ d s d t = 1 2 ∣ → r × d → r d t ∣ = 1 2 | → r × → v | d s = 1 2 r | d r → | s i n α = 1 2 | r → × d r → | 又 ∵ d r → = v → d t ∴ d s d t = 1 2 ∣ r → × d r → d t ∣ = 1 2 | r → × v → |
因此面积速度 d s d t d s d t v 1 v 1 r 1 r 1 r 2 r 2 v 2 v 2 O O
→ L 2 = → L 1 L 2 = L 1 r 1 m v 1 = r 2 m v 2 v 2 = r 1 v 1 r 2 L 2 → = L 1 → L 2 = L 1 r 1 m v 1 = r 2 m v 2 v 2 = r 1 v 1 r 2
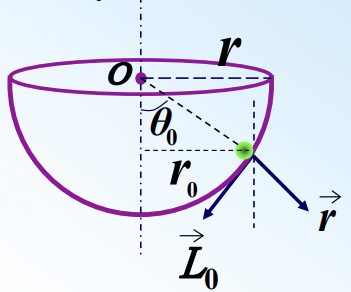
现在来考虑另一个情景:如图,将一个质点沿一个半径为 r r v 0 v 0 v 0 v 0 Θ 0 Θ 0 O O O O → M = → r × → F M → = r → × F → y y y y M y = 0 M y = 0 y y L y L y
L 0 = r m v 0 sin 90 ∘ = r m v 0 L 0 y = L 0 sin Θ 0 = r m v 0 sin Θ 0 = m v 0 r 0 L y = L = r m v sin 90 c i r = m v r ∵ L 0 y = L y ( 角 动 量 分 量 守 恒 ) ∴ m v 0 r 0 = m v r L 0 = r m v 0 sin 90 ∘ = r m v 0 L 0 y = L 0 sin Θ 0 = r m v 0 sin Θ 0 = m v 0 r 0 L y = L = r m v sin 90 c i r = m v r ∵ L 0 y = L y ( 角 动 量 分 量 守 恒 ) ∴ m v 0 r 0 = m v r
结合机械能守恒可得
⎧ ⎪ ⎨ ⎪ ⎩ m v 0 r 0 = m v r 1 2 m v 2 0 = 1 2 m v 2 + m g r cos Θ 0 r 0 = r sin Θ 0 解 得 v 0 = √ 2 g r cos Θ 0 { m v 0 r 0 = m v r 1 2 m v 0 2 = 1 2 m v 2 + m g r cos Θ 0 r 0 = r sin Θ 0 解 得 v 0 = 2 g r cos Θ 0
这何尝不是一种引里面的小球模型呢。



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 分享一个免费、快速、无限量使用的满血 DeepSeek R1 模型,支持深度思考和联网搜索!
· 使用C#创建一个MCP客户端
· ollama系列1:轻松3步本地部署deepseek,普通电脑可用
· 基于 Docker 搭建 FRP 内网穿透开源项目(很简单哒)
· 按钮权限的设计及实现