
cocos creator基础-(二十八)creator网格导航寻路
1、插件或者TileMap工具生成地图json文件
2、astar寻路算法(终点 详情请看JS学习内的文章)
3、将json文件与寻路算法结合,获得路径坐标,并转化为游戏内的实际坐标
// astar算法 模仿blake老师的写法,用来熟悉算法 var map_maze = []; // 场景节点顺序保存数组 var open_table = []; // 开启列表 var close_table = []; // 关闭列表 var path_stack = []; // 保存路径 var is_found = 0; // 是否找到路径 1 true 0 false var open_node_count = 0; // 开启列表元素个数 var close_node_count = 0; // 关闭列表元素个数 var top = -1; // path_stack从后往前变量指针 var map_height = 0; //地图高度 var map_width = 0; // 地图宽度 var BARRIER = 1; // 阻挡标记 function swap(idx1, idx2) { var tmp = open_table[idx1]; open_table[idx1] = open_table[idx2]; open_table[idx2] = tmp; } function adjust_heap(nIndex){ var curr = nIndex; var child = curr * 2 - 1; // 得到左孩子idx( 下标从0开始,所有做孩子是curr*2+1 ) var parent = Math.floor((curr - 1) / 2); // 得到双亲idx if(nIndex < 0 || nIndex >= open_node_count){ return; } // 往下调整( 要比较左右孩子和cuur parent ) while(child < open_node_count){ if(child + 1 < open_node_count && open_table[child].s_g + open_table[child].s_h > open_table[child + 1].s_g + open_table[child + 1].s_h){ ++child; // 判断左右孩子大小 } if (open_table[curr].s_g + open_table[curr].s_h <= open_table[child].s_g + open_table[child].s_h) { break; }else{ swap(child, curr); // 交换节点 curr = child;// 再判断当前孩子节点 child = curr * 2 + 1; // 再判断左孩子 } } if (curr != nIndex) { return; } // 往上调整( 只需要比较cuur child和parent ) while (curr != 0) { if (open_table[curr].s_g + open_table[curr].s_h >= open_table[parent].s_g + open_table[parent].s_h) { break; } else { swap(curr, parent); curr = parent; parent = Math.floor((curr - 1) / 2); } } } function insert_to_opentable(x, y, curr_node, end_node, w){ // w损耗 var i; if (map_maze[x * map_width + y].s_style != BARRIER){ // 不是障碍物 if (!map_maze[x * map_width + y].s_is_in_closetable){ // 不在闭表中 if (map_maze[x * map_width + y].s_is_in_opentable){ // 在open表中 // 需要判断是否是一条更优化的路径 // 检查如果用新的路径 (就是经过C 的路径) 到达它的话, G值是否会更低一些, // 如果新的G值更低, 那就把它的 "父方格" 改为目前选中的方格 C, // 然后重新计算它的 F 值和 G 值 (H 值不需要重新计算, 因为对于每个方块, H 值是不变的). // 如果新的 G 值比较高, 就说明经过 C 再到达 D 不是一个明智的选择, 因为它需要更远的路, 这时我们什么也不做. if (map_maze[x * map_width + y].s_g > curr_node.s_g + w){ //如果更优化 map_maze[x * map_width + y].s_g = curr_node.s_g + w; map_maze[x * map_width + y].s_parent = curr_node; for (i = 0; i < open_node_count; ++i) { if (open_table[i].s_x == map_maze[x * map_width + y].s_x && open_table[i].s_y == map_maze[x * map_width + y].s_y) { break; } } adjust_heap(i); // 下面调整点 } }else{// 不在open中 map_maze[x * map_width + y].s_g = curr_node.s_g + w; map_maze[x * map_width + y].s_h = Math.abs(end_node.s_x - x) + Math.abs(end_node.s_y - y); map_maze[x * map_width + y].s_parent = curr_node; map_maze[x * map_width + y].s_is_in_opentable = 1; open_table[open_node_count++] = (map_maze[x * map_width + y]); } } } } // 邻居处理 function get_neighbors(curr_node, end_node) { var x = curr_node.s_x; var y = curr_node.s_y; // 下面对于8个邻居进行处理! // 直线损耗10 斜线损耗14 if ((x + 1) >= 0 && (x + 1) < map_height && y >= 0 && y < map_width) { insert_to_opentable(x + 1, y, curr_node, end_node, 10); } if ((x - 1) >= 0 && (x - 1) < map_height && y >= 0 && y < map_width) { insert_to_opentable(x - 1, y, curr_node, end_node, 10); } if (x >= 0 && x < map_height && (y + 1) >= 0 && (y + 1) < map_width) { insert_to_opentable(x, y + 1, curr_node, end_node, 10); } if (x >= 0 && x < map_height && (y - 1) >= 0 && (y - 1) < map_width) { insert_to_opentable(x, y - 1, curr_node, end_node, 10); } if ((x + 1) >= 0 && (x + 1) < map_height && (y + 1) >= 0 && (y + 1) < map_width) { insert_to_opentable(x + 1, y + 1, curr_node, end_node, 10 + 4); } if ((x + 1) >= 0 && (x + 1) < map_height && (y - 1) >= 0 && (y - 1) < map_width) { insert_to_opentable(x + 1, y - 1, curr_node, end_node, 10 + 4); } if ((x - 1) >= 0 && (x - 1) < map_height && (y + 1) >= 0 && (y + 1) < map_width) { insert_to_opentable(x - 1, y + 1, curr_node, end_node, 10 + 4); } if ((x - 1) >= 0 && (x - 1) < map_height && (y - 1) >= 0 && (y - 1) < map_width) { insert_to_opentable(x - 1, y - 1, curr_node, end_node, 10 + 4); } } // 0. 初始化01地图 // 1. 从起点A开始, 把它作为待处理的方格存入一个"开启列表", 开启列表就是一个等待检查方格的列表. // 2. 寻找起点A周围可以到达的方格, 将它们放入"开启列表", 并设置它们的"父方格"为A. // 3. 从"开启列表"中删除起点 A, 并将起点 A 加入"关闭列表", "关闭列表"中存放的都是不需要再次检查的方格 // 4. 从 "开启列表" 中选择 F 值最低的方格 C (绿色起始方块 A 右边的方块),检查它所有相邻并且可以到达 (障碍物和 "关闭列表" 的方格都不考虑) 的方格. 如果这些方格还不在 "开启列表" 里的话, 将它们加入 "开启列表", 计算这些方格的 G, H 和 F 值各是多少, 并设置它们的 "父方格" 为 C. // 5. 如果某个相邻方格 D 已经在 "开启列表" 里了, 检查如果用新的路径 (就是经过C 的路径) 到达它的话, G值是否会更低一些, 如果新的G值更低, 那就把它的 "父方格" 改为目前选中的方格 C, 然后重新计算它的 F 值和 G 值 (H 值不需要重新计算, 因为对于每个方块, H 值是不变的). 如果新的 G 值比较高, 就说明经过 C 再到达 D 不是一个明智的选择, 因为它需要更远的路, 这时我们什么也不做. // 就这样, 我们从 "开启列表" 找出 F 值最小的, 将它从 "开启列表" 中移掉, 添加到 "关闭列表". 再继续找出它周围可以到达的方块, 如此循环下去... // 那么什么时候停止呢? —— 当我们发现 "开始列表" 里出现了目标终点方块的时候, 说明路径已经被找到. // 最后以终点为起点通过 "父方块" 可以依次索引到最初的 "起始方块", 这样就得到了路径 // 0.(此处是否可优化下map_maze的初始化,不必每次都清空push一次???) function astar_init(map){ open_table = []; close_table = []; path_stack = []; map_maze = []; map_height = map.height; map_width = map.width; is_found = 0; open_node_count = 0; close_node_count = 0; top = -1; for (var i = 0; i < map.length; i++){ for(var j = 0; j < map.width; j++){ var node = {}; // F = G + H 其中,F 是从起点经过该点到终点的总路程,G 为起点到该点的“已走路程”,H 为该点到终点的“预计路程”。 node.s_g = 0; // g值 node.s_h = 0; node.s_is_in_closetable = 0; node.s_is_in_opentable = 0; node.s_style = map.data[i * map.width + j]; // 数据类型 0 1 node.s_x = i; node.s_y = j; node.s_parent = null; map_maze.push(node); path_stack.push(null); open_table.push(null); close_table.push(null); } } } // 1. A*核心代码 function astar_search(map, src_x, src_y, dst_x, dst_y){ var path = []; if(src_x == dst_x && src_y == dst_y){ console.log("起点==终点!"); return path; } // 初始化map astar_init(map); //1. 从起点A开始, 把它作为待处理的方格存入一个"开启列表", 开启列表就是一个等待检查方格的列表. var start_node = map_maze[src_y * map.width + src_x]; var end_node = map_maze[dst_y * map.width + dst_x]; var curr_node = null; open_table[open_node_count++] = start_node; start_node.s_is_in_opentable = 1; // 加入open表 start_node.s_g = 0; // 曼哈顿距离 start_node.s_h = Math.abs(end_node.s_x - start_node.s_x) + Math.abs(end_node.s_y - start_node.s_y); start_node.s_parent = null; is_found = 0; while(1){ curr_node = open_table[0]; // open表的第一个点一定是f值最小的点(通过堆排序得到的) open_table[0] = open_table[--open_node_count]; // 最后一个点放到第一个点,然后进行堆调整 adjust_heap(0); // 调整堆 close_table[close_node_count++] = curr_node; // 当前点加入close表 curr_node.s_is_in_closetable = 1; // 已经在close表中了 if (curr_node.s_x == end_node.s_x && curr_node.s_y == end_node.s_y) // 终点在close中,结束 { is_found = 1; break; } get_neighbors(curr_node, end_node); // 对邻居的处理 if (open_node_count == 0) // 没有路径到达 { is_found = 0; break; } } if(is_found){ curr_node = end_node; while(curr_node){ path_stack[++top] = curr_node; curr_node = curr_node.s_parent; } while (top >= 0) // 下面是输出路径看看~ { console.log(path_stack[top].s_y, path_stack[top].s_x); path.push(cc.v2(path_stack[top].s_y, path_stack[top].s_x)); top--; } }else{ console.log("么有找到路径"); } return path; } module.exports = { search: astar_search, };

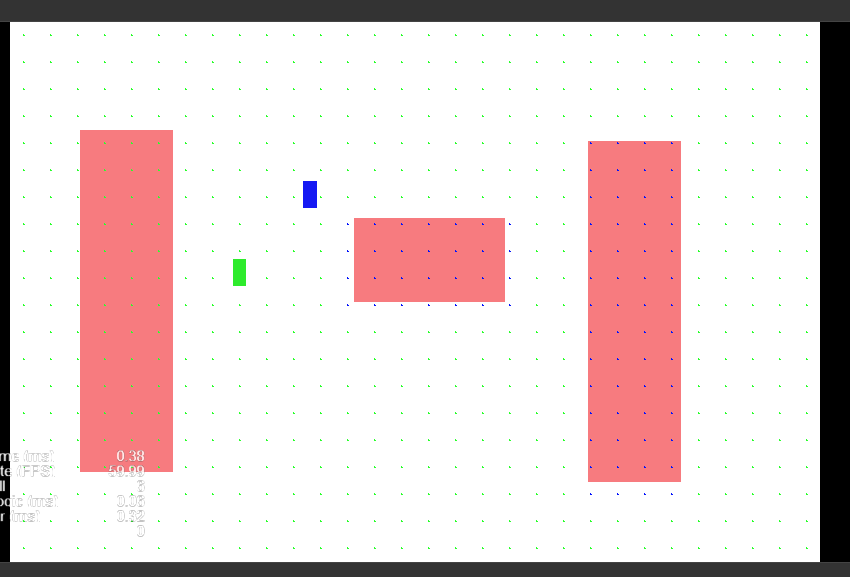
// nav_map.js 将路径转换为游戏内的坐标 var astar = require("astar"); cc.Class({ extends: cc.Component, properties: { // foo: { // default: null, // The default value will be used only when the component attaching // to a node for the first time // url: cc.Texture2D, // optional, default is typeof default // serializable: true, // optional, default is true // visible: true, // optional, default is true // displayName: 'Foo', // optional // readonly: false, // optional, default is false // }, // ... is_debug: true, }, onLoad: function(){ var newNode = new cc.Node(); this.new_draw_node = newNode.addComponent(cc.Graphics); this.node.addChild(newNode); this.new_draw_node.lineWidth = 2; this.color1 = new cc.Color(0, 255, 0, 255); this.color2 = new cc.Color(0, 0, 255, 255); }, map_degbu_draw: function() { var x_line = this.map.item_size * 0.5; var ypos = this.map.item_size * 0.5; this.new_draw_node.clear(); for (var i = 0; i < this.map.height; i++) { var xpos = x_line; for (var j = 0; j < this.map.width; j++) { if (this.map.data[i * this.map.width + j] === 0) { this.new_draw_node.strokeColor = this.color1; this.new_draw_node.moveTo(xpos, ypos); this.new_draw_node.lineTo(xpos + 1, ypos + 1); this.new_draw_node.stroke(); } else { this.new_draw_node.strokeColor = this.color2; this.new_draw_node.moveTo(xpos, ypos); this.new_draw_node.lineTo(xpos + 1, ypos + 1); this.new_draw_node.stroke(); } xpos += this.map.item_size; } ypos += this.map.item_size; } }, start: function(){ this.map = require("game_map_" + this.node.name); if (this.is_debug) { this.map_degbu_draw(); } }, astar_search: function(src_w, dst_W){ var src = this.node.convertToNodeSpaceAR(src_w); var dst = this.node.convertToNodeSpaceAR(dst_w); var src_mx = Math.floor((src.x) / this.map.item_size); var src_my = Math.floor((src.y) / this.map.item_size); var dst_mx = Math.floor((dst.x) / this.map.item_size); var dst_my = Math.floor((dst.y) / this.map.item_size); var path = astar.search(this.map, src_mx, src_my, dst_mx, dst_my); var world_offset = this.node.convertToWorldSpaceAR(cc.v2(this.map.item_size * 0.5, this.map.item_size * 0.5)); var path_pos = []; for(var i = 0; i < path.length; i++){ var x = path[i].x * this.map.item_size; var y = path[i].y * this.map.item_size; var pos = cc.v2(world_offset.x + x, world_offset.y + y); path_pos.push(pos); } return path_pos; } });
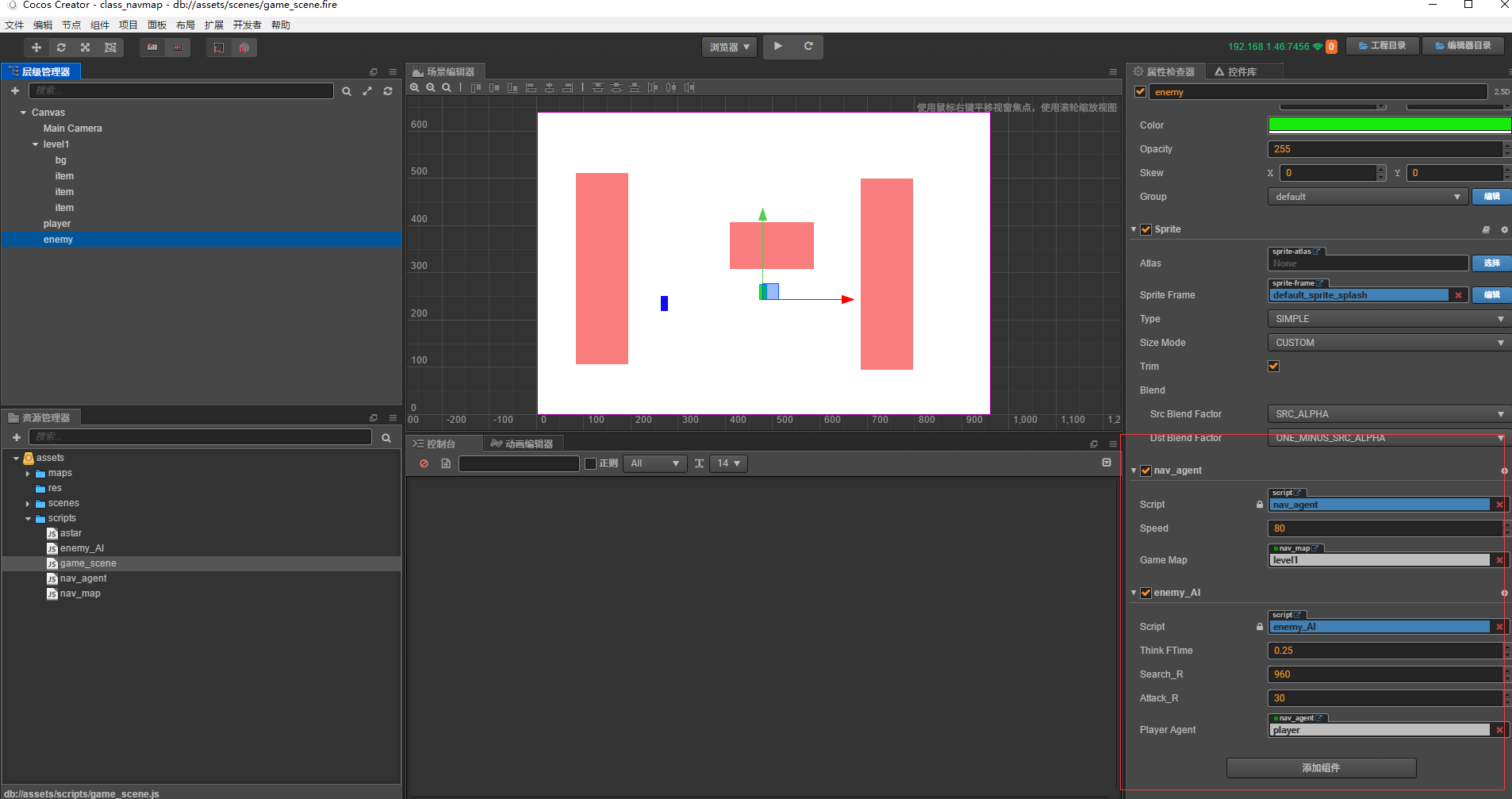
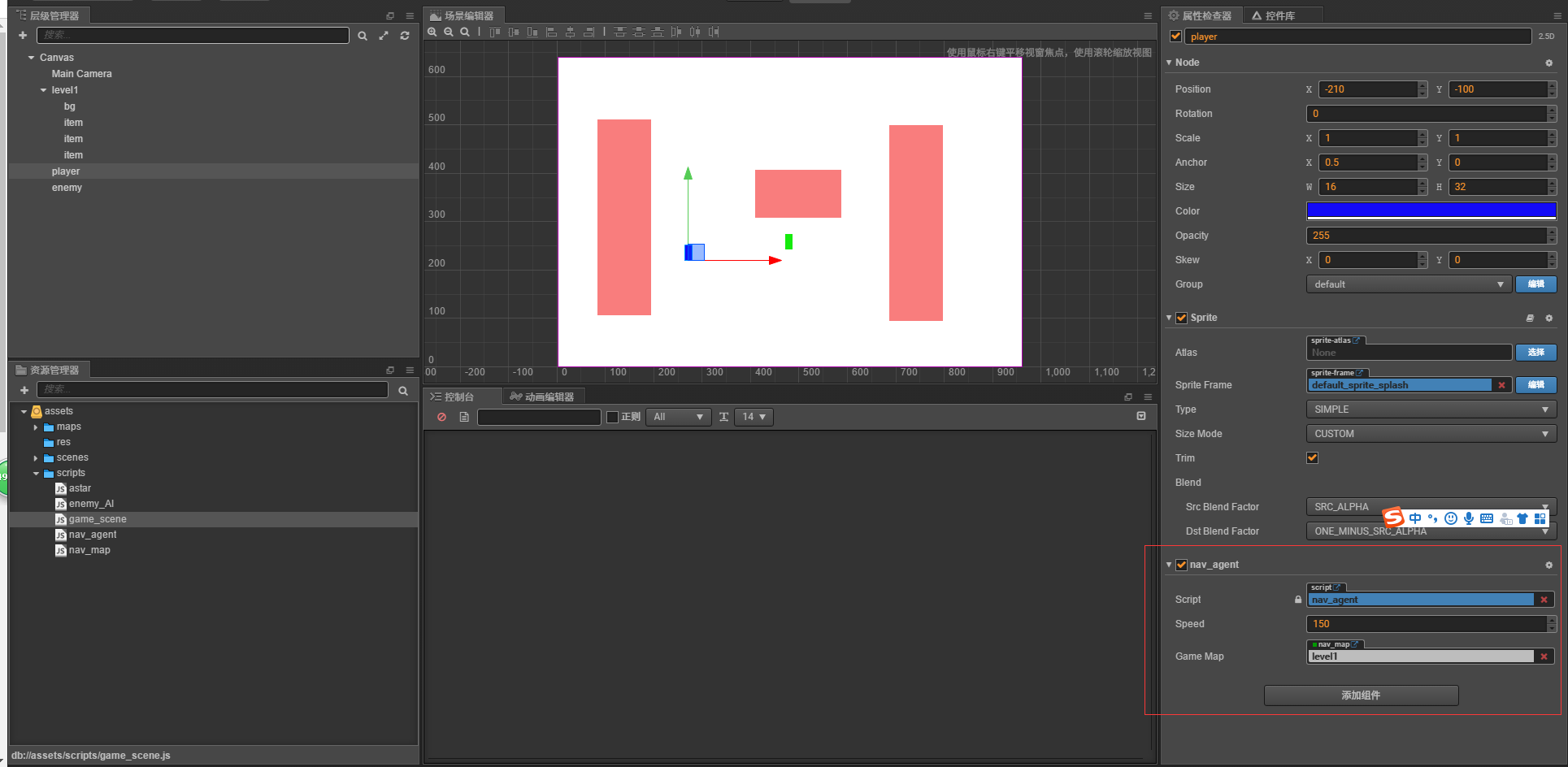
// nav_agent.js 寻路的实际应用 var nav_map = require("nav_map"); var State = { Idle: 0, Walk: 1, }; cc.Class({ extends: cc.Component, properties: { // foo: { // default: null, // The default value will be used only when the component attaching // to a node for the first time // url: cc.Texture2D, // optional, default is typeof default // serializable: true, // optional, default is true // visible: true, // optional, default is true // displayName: 'Foo', // optional // readonly: false, // optional, default is false // }, // ... speed: 100, game_map: { type: nav_map, default: null, } }, // use this for initialization onLoad: function() { this.state = State.Idle; this.walk_total = 0.0; this.walk_time = 0; }, nav_to_map: function(dst_wpos) { var src_wpos = this.node.convertToWorldSpaceAR(cc.v2(0, 0)); this.road_set = this.game_map.astar_search(src_wpos, dst_wpos); console.log(this.road_set); if (!this.road_set || this.road_set.length <= 1) { this.state = State.Idle; return; } this.walk_next = 1; this._walk_to_next(); }, stop_nav: function() { this.state = State.Idle; }, _walk_to_next: function() { if (!this.road_set || this.walk_next >= this.road_set.length) { this.state = State.Idle; return; } var src = this.node.getPosition(); var dst = this.node.parent.convertToNodeSpaceAR(this.road_set[this.walk_next]); var dir = dst.sub(src); // 朝向 var len = dir.mag(); this.vx = (dir.x / len) * this.speed; this.vy = (dir.y / len) * this.speed; this.walk_total = len / this.speed; this.walk_time = 0; this.state = State.Walk; }, _walk_update: function(dt) { if (this.state != State.Walk) { return; } this.walk_time += dt; if (this.walk_time > this.walk_total) { dt -= (this.walk_time - this.walk_total); } var sx = this.vx * dt; var sy = this.vy * dt; this.node.x += sx; this.node.y += sy; if (this.walk_time > this.walk_total) { this.walk_next++; this._walk_to_next(); } }, update: function(dt) { if (this.state == State.Walk) { this._walk_update(dt); } }, });
// enemy_AI.js 简单的怪物AI var nav_agent = require("nav_agent"); cc.Class({ extends: cc.Component, properties: { // foo: { // default: null, // The default value will be used only when the component attaching // to a node for the first time // url: cc.Texture2D, // optional, default is typeof default // serializable: true, // optional, default is true // visible: true, // optional, default is true // displayName: 'Foo', // optional // readonly: false, // optional, default is false // }, // ... think_f_time: 0.25, search_R: 150, // 发现玩家追击上去 attack_R: 30, // 攻击玩家。 player_agent: { type: nav_agent, default: null, } }, // use this for initialization onLoad: function() { this.think_time = 0.0; this.agent = this.getComponent("nav_agent"); }, _do_think_AI: function() { var target_pos = this.player_agent.node.getPosition(); var now_pos = this.node.getPosition(); var dir = target_pos.sub(now_pos); var len = dir.mag(); if (len > this.search_R) { // 停止下来 this.agent.stop_nav(); return; } if (len < this.attack_R) { this.agent.stop_nav(); return; } target_pos = this.player_agent.node.convertToWorldSpaceAR(cc.v2(0, 0)); this.agent.nav_to_map(target_pos); }, // called every frame, uncomment this function to activate update callback update: function(dt) { this.think_time += dt; if (this.think_time >= this.think_f_time) { // 决策来做思考 this.think_time = 0.0; this._do_think_AI(); } }, });

 浙公网安备 33010602011771号
浙公网安备 33010602011771号