基于英伟达Jetson TX1的GPU处理平台
基于英伟达Jetson TX1 GPU的HDMI图像输入的深度学习套件 [309]
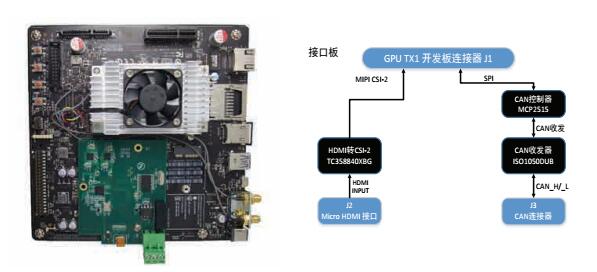
本平台基于英伟达的Jetson TX1视觉计算的全功能开发板,配合本公司研发的HDMI输入图像采集板;Jetson TX1集合64位
ARM A57 CPU与1 TFLOP/s 256核Maxwell GPU处理器,并具备4 GB LPDDR4 | 25.6 GB/s内存,16 GB eMMC存储;HDMI
采集板使用Micro HDMI接口作为输入接口,并通过芯片
TC358840XBG完成从HDMI到MIPI CSI2的协议转换;同时使用MCP2515作为SPI接口的CAN控制器,配合ISO1050CAN收发
器完成CAN协议通信。
应用于单视觉辅助驾驶系统;视频图像算法研究;无人机;自主机器人系统;精准农业等领域。
基于Jetson TX1 GPU的人眼双视觉仿真系统

本系统基于英伟达的Jetson TX1超级计算模块和索尼的2.31Mp分辨率图像传感器,并配一块外围接口底板,实现高清图像及视频采集,
数据快速精确处理,数据传输等一系列功能。整体设计采用核心板+外围接口底板模式,采用Jetson TX1核心板,采用耐高温、体积小、
精度高的B2B连接器,引出了核心板的大部分接口资源,并在外围接口底板上实现摄像头及其他接口的连接。
本系统最多支持3个M12摄像头,摄像头采用的是索尼对角线8.58mm尺寸的1/1.9 CMOS图像传感器IMX185LQJ;外围接口:
1个Micro SD卡接口、一个USB 3.0接口、一个USB 2.0 Micro B接口、一个HDMI接口以及一个RJ45接口等。
基于Jetson TX1 GPU的四视觉辅助驾驶系统
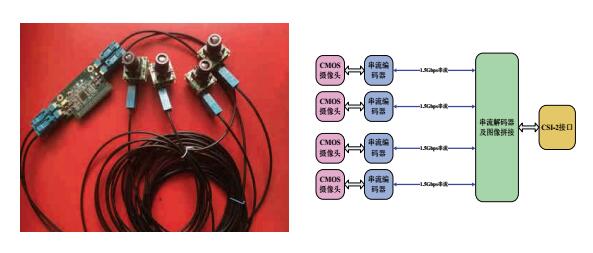
本系统基于英伟达公司的Jetson TX1超级计算模块,开发出针对汽车或机器人的环视应用,采用HDR高清CMOS传感器,最高支持4路摄像头同步采集。
图像传感器采用进口汽车级HDR CMOS芯片,尺寸为
1/2.7”, 支持1280x720p @ 30FPS;使用3M长50ΩRG174
同轴电缆,汽车专用FAKRA插座插头。3排2.0间距插针,可直接与Jetson TK1 扩展口插接。工作温度:-40℃到 +105℃。主要应用于视觉辅助驾驶系统等领域。
基于Jetson TX1 GPU的Camera Link 机器视觉分析平台
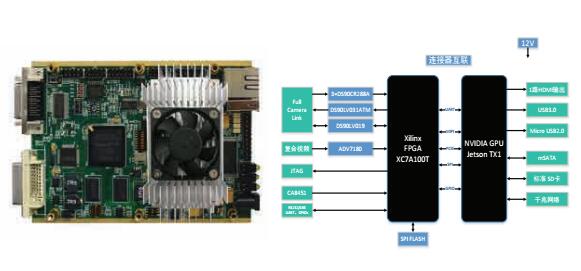
本平台基于英伟达的Jetson TX1超级计算模块以及Xilinx公
司的XC7A100T-2FGG484芯片,利用Samtec公司的标准连接器进行互联。本平台支持CameraLink(双路BASE/单路FULL)
、相机CA8451、复合视频三种视频/图像采集输入方式,利用平台出色的数据处理能力,完成图像的处理,更好的支撑辅助工业
现场等应用环境。同时平台拥有丰富的外围接口,包括一个HDMI接口、一个USB3.0接口、一个Micro USB2.0接口、一个mSATA插槽、
一个标准SD卡槽以及一个RJ45;支持操作系统显示、存储扩展、连接机电控制等多种功能。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号