洋葱细胞数字全息显微实验演示
一、相移法重建全息记录面上物光场相位原理
1.1 光场相位的记录
全息照相过程中,设某点(x,y)处物光场和参考光场分别为 O ~ ( x , y ) = o ( x , y ) e j φ ( x , y ) \tilde{O}(x,y)=o(x,y){{e}^{j\varphi (x,y)}} O~(x,y)=o(x,y)ejφ(x,y)和 R ~ ( x , y ) = r ( x , y ) e j ϕ ( x , y ) \tilde{R}(x,y)=r(x,y){{e}^{j\phi (x,y)}} R~(x,y)=r(x,y)ejϕ(x,y),参考光与物光相互干涉从而记录物光的相位。

显然,若
φ
(
x
,
y
)
−
ϕ
(
x
,
y
)
=
2
k
π
\varphi \left( x,y \right)-\phi \left( x,y \right)=2k\pi
φ(x,y)−ϕ(x,y)=2kπ ,其中
k
=
0
,
±
1
,
±
2
⋯
k=0,\pm 1,\pm 2\cdots
k=0,±1,±2⋯,则(x,y)处将出现明纹;若
φ
(
x
,
y
)
−
ϕ
(
x
,
y
)
=
(
2
k
+
1
)
π
\varphi \left( x,y \right)-\phi \left( x,y \right)=\left( 2k+1 \right)\pi
φ(x,y)−ϕ(x,y)=(2k+1)π,
k
=
0
,
±
1
,
±
2
⋯
k=0,\pm 1,\pm 2\cdots
k=0,±1,±2⋯ ,则(x,y)处将出现暗纹,所以,全息图实际上就是一幅干涉图,用干涉条纹的明、暗记录相位(即物光与参考光的相位差)。
1.2 相位重建基本原理
通过干涉图重建光场相位常用的方法有三种:用相移法重建全息记录面上物光场相位、用衍射计算重构物光场并重建光场相位,以及用傅里叶变换重构物光场并重建光场相位。
用相移法重建全息记录面上物光场相位通常用在像面全息(image plane hologram)中,即需要将全息记录面置于系统清晰成像的像面上。相移法重建物光场相位需要通过精确改变参考光的相位,拍摄至少两幅数字全息图。以典型的四步相移法为例,令参考光相位每次改变π/2,四个参考光场分别为
R ~ i ( x , y ) = R ~ ( x , y ) exp [ j ( i − 1 ) π / 2 ] , i = 1 , 2 , 3 , 4 {{\tilde{R}}_{i}}\left( x,y \right)=\tilde{R}\left( x,y \right)\exp \left[ j(i-1)\pi /2 \right],i=1,2,3,4 R~i(x,y)=R~(x,y)exp[j(i−1)π/2],i=1,2,3,4
相应依次记录下四幅不同的全息图
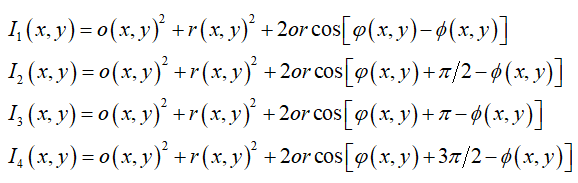
容易推导出,在(x,y)处物光场和参考光场相位之差可以由下式求出:

二、数字全息显微实验

为演示上述相位重构原理,以一个观测洋葱细胞的数字全息显微为例,光路如图1所示。其中,HeNe激光束(波长λ=632.8mm)经分束镜后分成两束,其中一束经反射镜照射到样品上,显微物镜将透射光投射到光电耦合器件CCD上。另一束通过扩束透镜和针孔滤波器后,经准直透镜变为平面光束,由压电陶瓷管驱动的反射镜和分束镜反射到CCD上,作为记录参考光。实验中通过计算机控制压电陶瓷作精确相位,记录得到四幅全息图,以便用上式计算重建相位。
三、实验结果
根据四步相移算法原理,分别获取得到相移后的像面全息图,如下图所示:

根据上式,求解得到的包裹相位图。

采用最小二乘算法进行相位解包裹,得到的相位如下图所示:

四、资源获取
可点击如下链接下载相关资源!
资源共包含以下内容:
- 四幅像面全息图
- 洋葱细胞数字全息显微实验演示.m
该程序可为相关人员提供以下参考:
- 四步相移法获取光场相位
- 最小二乘相位解包裹算法的应用
下载后,即可运行!
如有疑问,可私信交流讨论~

 浙公网安备 33010602011771号
浙公网安备 33010602011771号