openGauss源码解析(5)
openGauss源码解析:openGauss简介(5)
1.4.3 存储引擎
openGauss存储引擎支持多个存储引擎来满足不同场景的业务诉求,目前支持行存储引擎、列存储引擎和内存引擎。
早期计算机程序通过文件系统管理数据,到了20世纪60年代这种方式就开始不能满足数据管理要求了,用户逐渐对数据并发写入的完整性、高效检索提出更高的要求。由于机械磁盘的随机读写性能问题,从20世纪80年代开始,大多数数据库一直在围绕着减少随机读写磁盘进行设计。主要思路是把对数据页面的随机写盘转换为对WAL(write ahead log,预写式日志)的顺序写盘,WAL持久化完成,事务就算提交成功,数据页面异步刷盘。但是随着内存容量变大、保电内存、非易失性内存的发展,以及SSD技术逐渐地成熟,I/O性能极大提高,经历了几十年发展的存储引擎需要调整架构来发挥SSD的性能和充分利用大内存计算的优势。随着互联网、移动互联网的发展,数据量剧增,业务场景多样化,一套固定不变的存储引擎不可能满足所有应用场景的诉求。因此现在的DBMS(database management system,数据库管理系统)需要设计支持多种存储引擎,根据业务场景来选择合适的存储模型。
1. 数据库存储引擎要解决的问题
(1) 存储的数据必须要保证ACID:原子性(atomicity)、一致性(consistency)、隔离性(isolation)、持久性(durability)。
(2) 高并发读写,高性能。
(3) 数据高效存储和检索能力。
2. openGauss存储引擎概述
openGauss整个系统设计支持多个存储引擎来满足不同场景的业务诉求。当前openGauss存储引擎有以下3种:
(1) 行存储引擎。主要面向OLTP(online transaction processing,在线交易处理)场景设计,例如订货发货,银行交易系统。
(2) 列存储引擎。主要面向OLAP场景设计,例如数据统计报表分析。
(3) 内存引擎。主要面向极致性能场景设计,例如银行风控场景。
创建表的时候可以指定行存储引擎表、列存储引擎表、内存引擎表,支持一个事务里包含对3种引擎表的DML(Data Manipulation Language,数据操作语言)操作,可以保证事务ACID。
1) storage源码组织
storage源码目录为:/src/gausskernel/storage。storage源码文件如表1-9所示。
表1-9 storage源码文件
模块 | 源码文件 | 功能 |
|---|---|---|
storage | access | 基础行存储引擎方法 |
cbtree | ||
hash | ||
heap | ||
index | ||
... | ||
buffer | 缓冲区 | |
freespace | 空闲空间管理 | |
ipc | 进程内交互 | |
large_object | 大对象处理 | |
remote | 远程读 | |
replication | 复制备份 | |
smgr | 存储管理 | |
cmgr | 公共缓存方法 | |
cstore | 列存储引擎 | |
dfs | 分布式文件系统 | |
file | 文件类 | |
lmgr | 锁管理 | |
mot | 内存引擎 | |
page | 数据页 |
2) storage主流程
storage主流程代码如下:
/* smgr/smgr.cpp, 存储管理 */
...
/* 存储管理函数列表,包含磁盘初始化、开关、同步等操作函数 */
static const f_smgr g_smgrsw[] = {
/* 磁盘*/
{mdinit,
NULL,
mdclose,
mdcreate,
mdexists,
mdunlink,
mdextend,
mdprefetch,
mdread,
mdwrite,
mdwriteback,
mdnblocks,
mdtruncate,
mdimmedsync,
mdpreckpt,
mdsync,
mdpostckpt,
mdasyncread,
mdasyncwrite}};
/*
* 存储管理初始化
* 当服务器后端启动时调用
*/
void smgrinit(void)
{
int i;
/* 初始化所有存储相关管理器 */
for (i = 0; i < SMGRSW_LENGTH; i++) {
if (g_smgrsw[i].smgr_init) {
(*(g_smgrsw[i].smgr_init))();
}
}
/* 登记存储管理终止程序 */
if (!IS_THREAD_POOL_SESSION) {
on_proc_exit(smgrshutdown, 0);
}
}
/*
* 当后端服务关闭时,执行存储管理关闭代码
*/
static void smgrshutdown(int code, Datum arg)
{
int i;
/* 关闭所有存储关联服务 */
for (i = 0; i < SMGRSW_LENGTH; i++) {
if (g_smgrsw[i].smgr_shutdown) {
(*(g_smgrsw[i].smgr_shutdown))();
}
}
}
3. 行存储引擎
openGauss的行存储引擎设计上支持MVCC(multi-version concurrency control,多版本并发控制),采用集中式垃圾版本回收机制,可以提供OLTP业务系统的高并发读写要求。架构如图1-6所示。
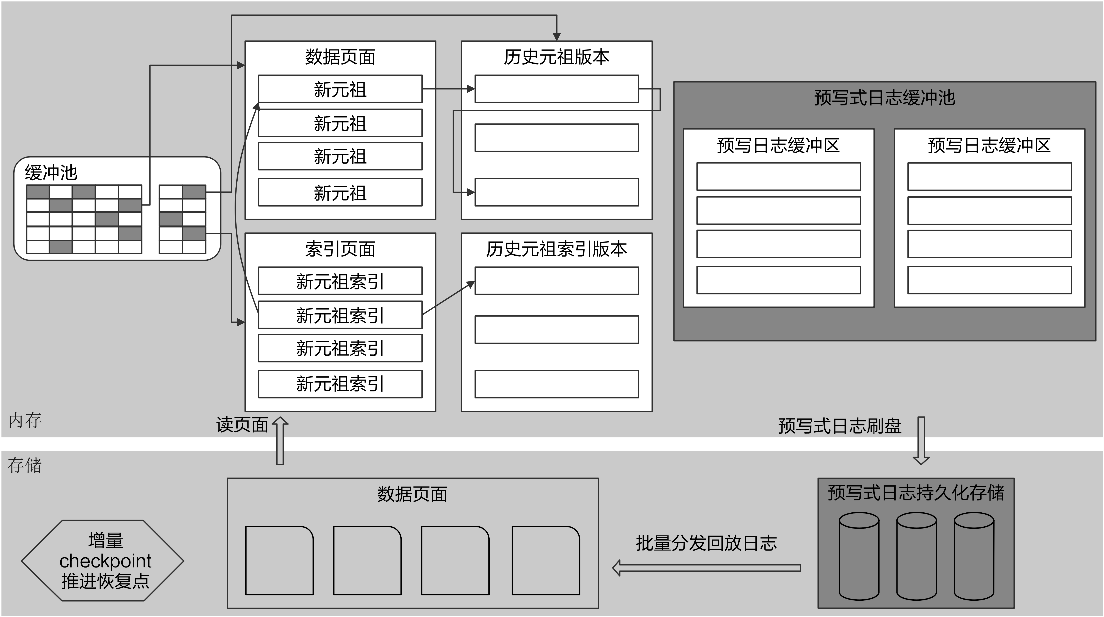
图1-6 行存储架构
行存储引擎的关键技术有:
(1) 基于CSN(commit sequence number,待提交事务的序列号,它是一个64位递增无符号数)的MVCC并发控制机制,进行集中式垃圾数据清理。
(2) 并行刷新日志,并行恢复。传统数据库一般都采用串行刷日志的设计,因为日志有顺序依赖关系,例如一个由事务产生的redo/undo log是有前后依赖关系的。openGauss的日志系统采用多个logwriter线程并行写的机制,充分发挥SSD的多通道I/O能力。
(3) 基于大内存设计的缓冲管理器。
行存储缓冲区主流程代码如下:
/* buffer/bufmgr.cpp, 基础行存储管理 */
...
/* 查找或创建一个缓冲区 */
Buffer ReadBufferExtended(
Relation reln, ForkNumber fork_num, BlockNumber block_num, ReadBufferMode mode, BufferAccessStrategy strategy)
{
bool hit = false;
Buffer buf;
if (block_num == P_NEW) {
STORAGE_SPACE_OPERATION(reln, BLCKSZ);
}
/* 以smgr(存储管理器)级别打开一个缓冲区 */
RelationOpenSmgr(reln);
/* 拒绝读取非局部临时关系的请求,因为可能会获得监控不到的错误数据 */
if (RELATION_IS_OTHER_TEMP(reln) && fork_num <= INIT_FORKNUM)
ereport(ERROR,
(errcode(ERRCODE_FEATURE_NOT_SUPPORTED), errmsg("cannot access temporary tables of other sessions")));
/* 读取缓冲区,更新统计信息数量反馈缓存命中与否情况 */
pgstat_count_buffer_read(reln);
pgstatCountBlocksFetched4SessionLevel();
buf = ReadBuffer_common(reln->rd_smgr, reln->rd_rel->relpersistence, fork_num, block_num, mode, strategy, &hit);
if (hit) {
pgstat_count_buffer_hit(reln);
}
return buf;
}
/* 释放一个缓冲区 */
void ReleaseBuffer(Buffer buffer)
{
BufferDesc* buf_desc = NULL;
PrivateRefCountEntry* ref = NULL;
/* 错误释放处理 */
if (!BufferIsValid(buffer)) {
ereport(ERROR, (errcode(ERRCODE_INVALID_BUFFER), (errmsg("bad buffer ID: %d", buffer))));
}
ResourceOwnerForgetBuffer(t_thrd.utils_cxt.CurrentResourceOwner, buffer);
if (BufferIsLocal(buffer)) {
Assert(u_sess->storage_cxt.LocalRefCount[-buffer - 1] > 0);
u_sess->storage_cxt.LocalRefCount[-buffer - 1]--;
return;
}
/* 释放当前缓冲区 */
buf_desc = GetBufferDescriptor(buffer - 1);
PrivateRefCountEntry *free_entry = NULL;
ref = GetPrivateRefCountEntryFast(buffer, free_entry);
if (ref == NULL) {
ref = GetPrivateRefCountEntrySlow(buffer, false, false, free_entry);}
Assert(ref != NULL);
Assert(ref->refcount > 0);
if (ref->refcount > 1) {
ref->refcount--;
} else {
UnpinBuffer(buf_desc, false);
}
}
/* 标记写脏缓冲区 */
void MarkBufferDirty(Buffer buffer)
{
BufferDesc* buf_desc = NULL;
uint32 buf_state;
uint32 old_buf_state;
if (!BufferIsValid(buffer)) {
ereport(ERROR, (errcode(ERRCODE_INVALID_BUFFER), (errmsg("bad buffer ID: %d", buffer))));}
if (BufferIsLocal(buffer)) {
MarkLocalBufferDirty(buffer);
return;
}
buf_desc = GetBufferDescriptor(buffer - 1);
Assert(BufferIsPinned(buffer));
Assert(LWLockHeldByMe(buf_desc->content_lock));
old_buf_state = LockBufHdr(buf_desc);
buf_state = old_buf_state | (BM_DIRTY | BM_JUST_DIRTIED);
/* 将未入队的脏页入队 */
if (g_instance.attr.attr_storage.enableIncrementalCheckpoint) {
for (;;) {
buf_state = old_buf_state | (BM_DIRTY | BM_JUST_DIRTIED);
if (!XLogRecPtrIsInvalid(pg_atomic_read_u64(&buf_desc->rec_lsn))) {
break;
}
if (!is_dirty_page_queue_full(buf_desc) && push_pending_flush_queue(buffer)) {
break;
}
UnlockBufHdr(buf_desc, old_buf_state);
pg_usleep(TEN_MICROSECOND);
old_buf_state = LockBufHdr(buf_desc);
}
}
UnlockBufHdr(buf_desc, buf_state);
/* 如果缓冲区不是“脏”状态,则更新相关计数 */
if (!(old_buf_state & BM_DIRTY)) {
t_thrd.vacuum_cxt.VacuumPageDirty++;
u_sess->instr_cxt.pg_buffer_usage->shared_blks_dirtied++;
pgstatCountSharedBlocksDirtied4SessionLevel();
if (t_thrd.vacuum_cxt.VacuumCostActive) {
t_thrd.vacuum_cxt.VacuumCostBalance += u_sess->attr.attr_storage.VacuumCostPageDirty;
}
}
}
4. 列存储引擎
传统行存储数据压缩率低,必须按行读取,即使读取一列也必须读取整行。openGauss创建表的时候,可以指定行存储还是列存储。列存储表也支持DML操作和MVCC。列存储架构如图1-7所示。
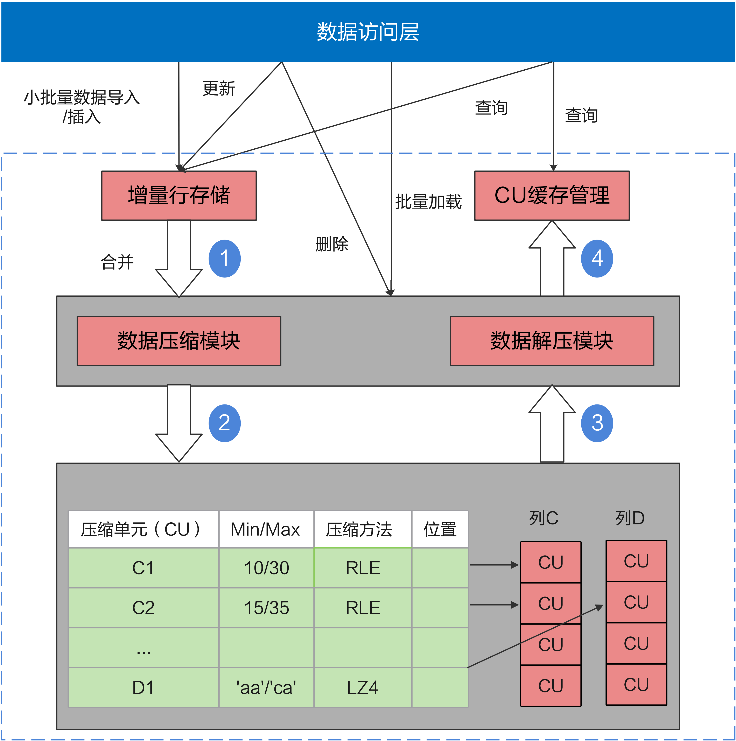
图1-7 列存储架构
列存储引擎有以下优势:
(1) 列的数据特征比较相似,适合压缩,压缩比很高。
(2) 当表列的个数比较多,但是访问的列个数比较少时,列存储可以按需读取列数据,大大减少不必要的读I/O开支,提高查询性能。
(3) 基于列批量数据Vector(向量)的运算,CPU的缓存命中率比较高,性能比较好。列存储引擎更适合OLAP大数据统计分析的场景。
1) 列存储源码组织
列存储源码目录为:/src/gausskernel/storage/cstore。列存储源码文件如表1-10所示。
表1-10 列存储源码文件
模块 | 源码文件 | 功能 |
cstore | compression | 数据压缩与解压 |
cstore_allocspace | 空间分配 | |
cstore_am | 列存储公共API(application programming interface,应用编程接口) | |
cstore_***_func | 支持函数 | |
cstore_psort | 列内排序 | |
cu | 数据压缩单元 | |
cucache_mgr | 缓存管理器 | |
custorage | 持久化存储 | |
cstore_delete | 删除方法 | |
cstore_update | 更新方法 | |
cstore_vector | 缓冲区实现 | |
cstore_rewrite | SQL重写 | |
cstore_insert | 插入方法 | |
cstore_mem_alloc | 内存分配 |
2) 列存储主要API
列存储主要API代码如下:
/* cstore_am.cpp */
...
/* 扫描 APIs */
void InitScan(CStoreScanState *state, Snapshot snapshot = NULL);
void InitReScan();
void InitPartReScan(Relation rel);
bool IsEndScan() const;
/* 延迟读取APIs */
bool IsLateRead(int id) const;
void ResetLateRead();
/* 更新列存储扫描计时标记*/
void SetTiming(CStoreScanState *state);
/* 列存储扫描*/
void ScanByTids(_in_ CStoreIndexScanState *state, _in_ VectorBatch *idxOut, _out_ VectorBatch *vbout);
void CStoreScanWithCU(_in_ CStoreScanState *state, BatchCUData *tmpCUData, _in_ bool isVerify = false);
/* 加载数据压缩单元描述信息 */
bool LoadCUDesc(_in_ int col, __inout LoadCUDescCtl *loadInfoPtr, _in_ bool prefetch_control, _in_ Snapshot snapShot = NULL);
/* 从描述表中获取数据压缩单元描述*/
bool GetCUDesc(_in_ int col, _in_ uint32 cuid, _out_ CUDesc *cuDescPtr, _in_ Snapshot snapShot = NULL);
/* 获取元组删除信息*/
void GetCUDeleteMaskIfNeed(_in_ uint32 cuid, _in_ Snapshot snapShot);
bool GetCURowCount(_in_ int col, __inout LoadCUDescCtl *loadCUDescInfoPtr, _in_ Snapshot snapShot);
/* 获取实时行号。 */
int64 GetLivedRowNumbers(int64 *deadrows);
/* 获得数据压缩单元*/
CU *GetCUData(_in_ CUDesc *cuDescPtr, _in_ int colIdx, _in_ int valSize, _out_ int &slotId);
CU *GetUnCompressCUData(Relation rel, int col, uint32 cuid, _out_ int &slotId, ForkNumber forkNum = MAIN_FORKNUM,
bool enterCache = true) const;
/* 缓冲向量填充 APIs */
int FillVecBatch(_out_ VectorBatch *vecBatchOut);
/* 填充列向量*/
template <bool hasDeadRow, int attlen>
int FillVector(_in_ int colIdx, _in_ CUDesc *cu_desc_ptr, _out_ ScalarVector *vec);
template <int attlen>
void FillVectorByTids(_in_ int colIdx, _in_ ScalarVector *tids, _out_ ScalarVector *vec);
template <int attlen>
void FillVectorLateRead(_in_ int seq, _in_ ScalarVector *tids, _in_ CUDesc *cuDescPtr, _out_ ScalarVector *vec);
void FillVectorByIndex(_in_ int colIdx, _in_ ScalarVector *tids, _in_ ScalarVector *srcVec, _out_ ScalarVector *destVec);
/* 填充系统列*/
int FillSysColVector(_in_ int colIdx, _in_ CUDesc *cu_desc_ptr, _out_ ScalarVector *vec);
template <int sysColOid>
void FillSysVecByTid(_in_ ScalarVector *tids, _out_ ScalarVector *destVec);
template <bool hasDeadRow>
int FillTidForLateRead(_in_ CUDesc *cuDescPtr, _out_ ScalarVector *vec);
void FillScanBatchLateIfNeed(__inout VectorBatch *vecBatch);
/* 设置数据压缩单元范围以支持索引扫描 */
void SetScanRange();
/* 判断行是否可用*/
bool IsDeadRow(uint32 cuid, uint32 row) const;
void CUListPrefetch();
void CUPrefetch(CUDesc *cudesc, int col, AioDispatchCUDesc_t **dList, int &count, File *vfdList);
/* 扫描函数 */
typedef void (CStore::*ScanFuncPtr)(_in_ CStoreScanState *state, _out_ VectorBatch *vecBatchOut);
void RunScan(_in_ CStoreScanState *state, _out_ VectorBatch *vecBatchOut);
int GetLateReadCtid() const;
void IncLoadCuDescCursor();
5. 内存引擎
openGauss引入了MOT(memory-optimized table,内存优化表)存储引擎,它是一种事务性行存储,针对多核和大内存服务器进行了优化。MOT是openGauss数据库出色的生产级特性(Beta版本),它为事务性工作负载提供更高的性能。MOT完全支持ACID,并包括严格的持久性和高可用性支持。企业可以在关键任务、性能敏感的在线事务处理(OLTP)中使用MOT,以实现高性能、高吞吐、可预测的低延迟以及多核服务器的高利用率。MOT尤其适合在多路和多核处理器的现代服务器上运行,例如基于ARM(advanced RISC machine,高级精简指令集计算机器)/鲲鹏处理器的华为TaiShan服务器,以及基于x86的戴尔或类似服务器。MOT存储引擎如图1-8所示。
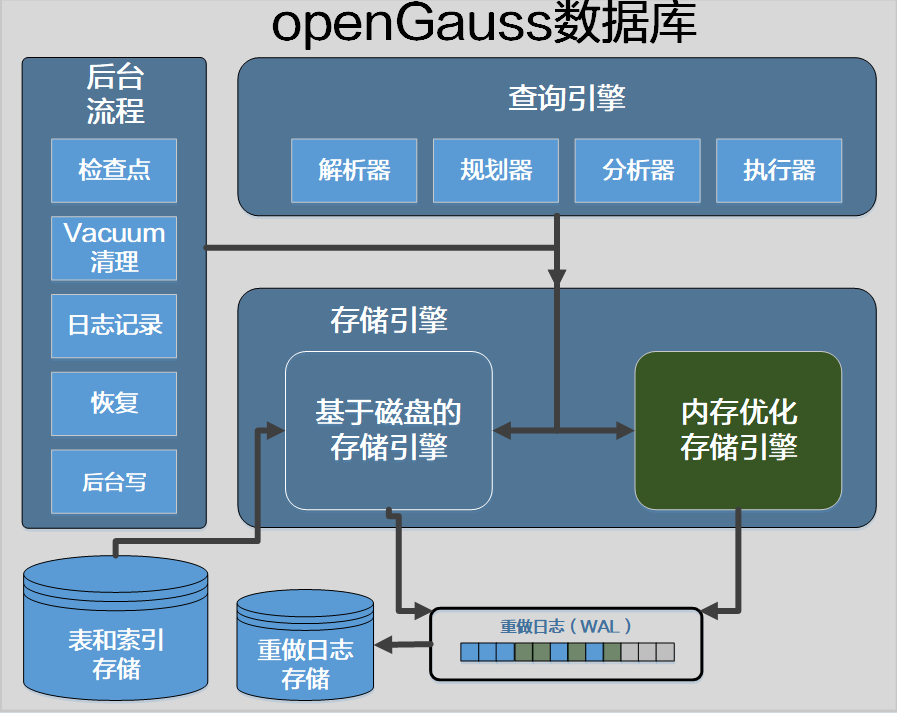
图1-8 MOT存储引擎
MOT与基于磁盘的普通表并排创建。MOT的有效设计实现了几乎完全的SQL覆盖,并且支持完整的数据库功能集,如存储过程和自定义函数。通过完全存储在内存中的数据和索引、非统一内存访问感知(NUMA-aware)设计、消除锁和锁存争用的算法以及查询原生编译,MOT可提供更快的数据访问和更高效的事务执行。MOT有效的几乎无锁的设计和高度调优的实现,使其在多核服务器上实现了卓越的近线性吞吐量扩展。
MOT的高性能(查询和事务延迟)、高可扩展性(吞吐量和并发量)等特点,在某些情况下低成本(高资源利用率)方面拥有显著优势。
(1) 低延迟(low latency):提供快速的查询和事务响应时间。
(2) 高吞吐量(high throughput):支持峰值和持续高用户并发。
(3) 高资源利用率(high resource utilization):充分利用硬件。
MOT的关键技术如下。
(1) 内存优化数据结构:以实现高并发吞吐量和可预测的低延迟为目标,所有数据和索引都在内存中,不使用中间页缓冲区,并使用持续时间最短的锁。数据结构和所有算法都是专门为内存设计而优化的。
(2) 免锁事务管理:MOT在保证严格一致性和数据完整性的前提下,采用乐观的策略实现高并发和高吞吐。在事务过程中,MOT不会对正在更新的数据行的任何版本加锁,从而大大降低了一些大内存系统中的争用。
(3) 免锁索引:由于内存表的数据和索引完全存储在内存中,因此拥有一个高效的索引数据结构和算法非常重要。MOT索引机制基于领域前沿的树结构Masstree,它是一种用于多核系统的快速和可扩展的键值(key value,KV)存储索引,以B+树的Trie组织形式实现。通过这种方式,高并发工作负载在多核服务器上可以获得卓越的性能。同时MOT应用了各种先进的技术以优化性能,如优化锁方法、高速缓存感知和内存预取。
(4) NUMA-aware的内存管理:MOT内存访问的设计支持非统一内存访问(NUMA,non-uniform memory access)感知。NUMA-aware算法增强了内存中数据布局的性能,使线程访问物理上连接到线程运行的核心的内存。这是由内存控制器处理的,不需要通过使用互连(如英特尔QPI(quick path interconnect,快速路径互连))进行额外的跳转。MOT的智能内存控制模块,为各种内存对象预先分配了内存池,提高了性能、减少了锁、保证了稳定性。
(5) 高效持久性:日志和检查点是实现磁盘持久化的关键能力,也是ACID的关键要求之一。目前所有的磁盘(包括SSD和NVMe(non-volatile memory express,非易失性高速传输总线))都明显慢于内存,因此持久化是基于内存数据库引擎的瓶颈。作为一个基于内存的存储引擎,MOT的持久化设计必须实现各种各样的算法优化,以确保持久化的同时还能达到设计时的速度和吞吐量目标。
(6) 高SQL覆盖率和功能集:MOT通过扩展的openGauss外部数据封装(foreign data wrapper,FDW)以及索引,几乎支持完整的SQL范围,包括存储过程、用户定义函数和系统函数调用。
(7) 使用PREPARE语句的查询原生编译:通过使用PREPARE客户端命令,可以以交互方式执行查询和事务语句。这些命令已被预编译成原生执行格式,也称为Code-Gen或即时(just-in-time,JIT)编译。这样可以实现平均30%的性能提升。
(8) MOT和openGauss数据库的无缝集成:MOT是一个高性能的面向内存优化的存储引擎,已集成在openGauss软件包中。MOT的主内存引擎和基于磁盘的存储引擎并存,以支持多种应用场景,同时在内部重用数据库辅助服务,如WAL重做日志、复制、检查点和恢复高可用性等。
1) 内存引擎源码组织
内存引擎源码目录为:/src/gausskernel/storage/mot。内存引擎源码文件如表1-11所示。
表1-11 内存引擎源码文件
模块 | 源码文件 | 功能 |
|---|---|---|
mot | concurrency_control | 并发控制管理 |
infra | 辅助与配置函数 | |
memory | 内存数据管理 | |
storage | 持久化存储 | |
system | 全局控制API | |
utils | 日志等通用方法 |
2) 内存引擎主流程
内存引擎主流程代码如下:
/* system/mot_engine.cpp */
...
/* 创建内存引擎实例 */
MOTEngine* MOTEngine::CreateInstance(
const char* configFilePath /* = nullptr */, int argc /* = 0 */, char* argv[] /* = nullptr */)
{
if (m_engine == nullptr) {
if (CreateInstanceNoInit(configFilePath, argc, argv) != nullptr) {
bool result = m_engine->LoadConfig();
if (!result) {
MOT_REPORT_ERROR(MOT_ERROR_INTERNAL, "System Startup", "Failed to load Engine configuration");
} else {
result = m_engine->Initialize();
if (!result) {
MOT_REPORT_ERROR(MOT_ERROR_INTERNAL, "System Startup", "Engine initialization failed");
}
}
if (!result) {
DestroyInstance();
MOT_ASSERT(m_engine == nullptr);
}
}
}
return m_engine;
}
/* 内存引擎初始化 */
bool MOTEngine::Initialize()
{
bool result = false;
/* 初始化应用服务,开始后台任务 */
do { // instead of goto
m_initStack.push(INIT_CORE_SERVICES_PHASE);
result = InitializeCoreServices();
CHECK_INIT_STATUS(result, "Failed to Initialize core services");
m_initStack.push(INIT_APP_SERVICES_PHASE);
result = InitializeAppServices();
CHECK_INIT_STATUS(result, "Failed to Initialize applicative services");
m_initStack.push(START_BG_TASKS_PHASE);
result = StartBackgroundTasks();
CHECK_INIT_STATUS(result, "Failed to start background tasks");
} while (0);
if (result) {
MOT_LOG_INFO("Startup: MOT Engine initialization finished successfully");
m_initialized = true;
} else {
MOT_LOG_PANIC("Startup: MOT Engine initialization failed!");
/* 调用方应在失败后调用DestroyInstance() */
}
return result;
}
/* 销毁内存引擎实例 */
void MOTEngine::Destroy()
{
MOT_LOG_INFO("Shutdown: Shutting down MOT Engine");
while (!m_initStack.empty()) {
switch (m_initStack.top()) {
case START_BG_TASKS_PHASE:
StopBackgroundTasks();
break;
case INIT_APP_SERVICES_PHASE:
DestroyAppServices();
break;
case INIT_CORE_SERVICES_PHASE:
DestroyCoreServices();
break;
case LOAD_CFG_PHASE:
break;
case INIT_CFG_PHASE:
DestroyConfiguration();
break;
default:
break;
}
m_initStack.pop();
}
ClearErrorStack();
MOT_LOG_INFO("Shutdown: MOT Engine shutdown finished");
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号