Pixel XYZ 深度版双目ROS 环境搭建
深度版双目相机,品牌:Pixel XYZ 实时输出双目原图+距离深度图。
系统 x86 ubuntu20.04, docker ubuntu 18.04
1. 供应商给的 catkin_ws 和 ptest
将两个压缩包解压,然后 copy 到 /root 下面
vim /etc/ld.so.conf
# 加上一行
/root/ptest/P_XYZ
cd catkin_ws
catkin_make
# 错误信息
```catkin_make 命令报错:
CMake Error at CMakeLists.txt:1:
Parse error. Expected a command name, got unquoted argument with text
"/opt/ros/melodic/share/catkin/cmake/toplevel.cmake".
# 解决
```参考: https://blog.csdn.net/m0_70652514/article/details/128907831
rm src/CMakeLists.txt
catkin_make
# 错误信息
```catkin_make 命令报错:
make[2]: *** No rule to make target '/home/neardi/ptest/P_XYZ/libav_filterlib.so.3.0.1.01', needed by '/root/catkin_ws/devel/lib/ptest_ros/ptest_ros'. Stop.
# 解决
```路径问题
vim src/ptest_ros/CMakeLists.txt
target_link_libraries(${PROJECT_NAME} /root/ptest/P_XYZ/libav_filterlib.so.3.0.1.01)
# 终端1:
roscore
# 终端2:
source devel/setup.bash
rosrun ptest_ros ptest_ros
# 终端3:
rviz
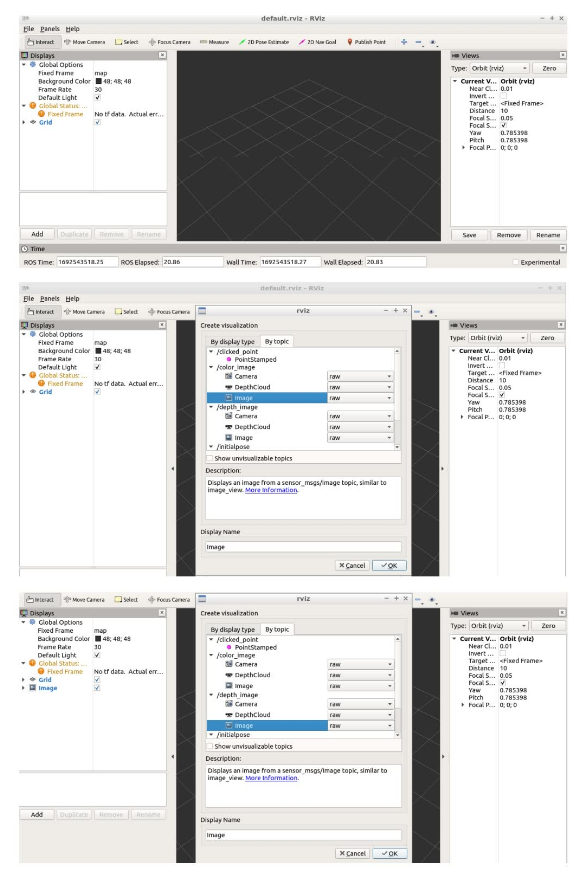
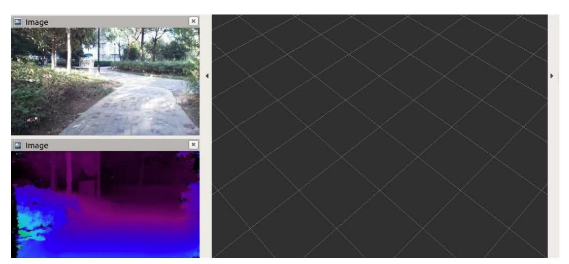
左目+深度。
请注意该代码发布的 图像 不带时间戳。所以需要加上。
vim src/ptest_ros/src/main.cpp
// 获取当前时间
ros::Time current_time = ros::Time::now();
std_msgs::Header header;
header.stamp = current_time; // 设置时间戳
// 调整图像尺寸为 640x360
// cv::resize(px_color_2, px_color_2, cv::Size(640, 360));
sensor_msgs::ImagePtr msg1 = cv_bridge::CvImage(header,"bgr8",px_color_2).toImageMsg();
pub1.publish(msg1);
sensor_msgs::ImagePtr msg2 = cv_bridge::CvImage(header,"bgr8",px_depth_2).toImageMsg();
pub2.publish(msg2);
跑 let-net vins-mono
roscore
rosrun ptest_ros ptest_ros
roslaunch fdilink_ahrs ahrs_data.launch
roslaunch vins_estimator d_custom_vi.launch
<launch>
<!-- 定义配置文件路径参数,默认值为$(find feature_tracker)/../config/uma-vi.yaml -->
<arg name="config_path" default = "$(find feature_tracker)/../config/custom/d_custom_config_no_extrinsic.yaml" />
<!-- 定义vins路径参数,默认值为$(find feature_tracker)/../config/../ -->
<arg name="vins_path" default = "$(find feature_tracker)/../config/../" />
<!-- 启动vins_estimator节点 -->
<node name="vins_estimator" pkg="vins_estimator" type="vins_estimator" output="screen">
<!-- 设置vins_estimator节点的配置文件参数 -->
<param name="config_file" type="string" value="$(arg config_path)" />
<!-- 设置vins_estimator节点的vins文件夹参数 -->
<param name="vins_folder" type="string" value="$(arg vins_path)" />
</node>
<!-- 启动pose_graph节点 -->
<node name="pose_graph" pkg="pose_graph" type="pose_graph" output="screen">
<!-- 设置pose_graph节点的配置文件参数 -->
<param name="config_file" type="string" value="$(arg config_path)" />
<!-- 设置pose_graph节点的可视化偏移参数 -->
<param name="visualization_shift_x" type="int" value="0" />
<param name="visualization_shift_y" type="int" value="0" />
<!-- 设置pose_graph节点的跳过计数参数 -->
<param name="skip_cnt" type="int" value="0" />
<!-- 设置pose_graph节点的跳过距离参数 -->
<param name="skip_dis" type="double" value="0" />
</node>
</launch>
roslaunch vins_estimator d_vins_rviz.launch
./devel/lib/feature_tracker/my_feature_tracker_illustration
跑 LET-NET VINS-mono 播放 bag 包
修改这三个文件:
roslaunch vins_estimator bag_custom_vi.launch
roslaunch vins_estimator d_vins_rviz.launch
./devel/lib/feature_tracker/my_feature_tracker_illustration
rosbag play /root/LET-NET/datasets/sync-ZHZ-indoor-test2.bag

 浙公网安备 33010602011771号
浙公网安备 33010602011771号