OA-SLAM 笔记
https://gitlab.inria.fr/tangram/oa-slam
https://blog.csdn.net/CV_Autobot/article/details/128168775
4.1
基于 ORB-SLAM2 (tracking, local mapping, loop closure) , 增加了 针对于 objects 的模块。这些模块使用 the ellipse/ellipsoid modeling framework, 和 points 使用相同的策略, 即在 frames 上跟踪 objects, 以 3D 的方式估计,插入到地图,然后不断优化。object tracking and object initial reconstruction are added to the main tracking thread。
- The local object mapping is handled in a similar way as the local point mapping and continuously refines the object models. It is run in a separate thread .
通过集成 objects, 重定位模块被增强,提高了 robustness.
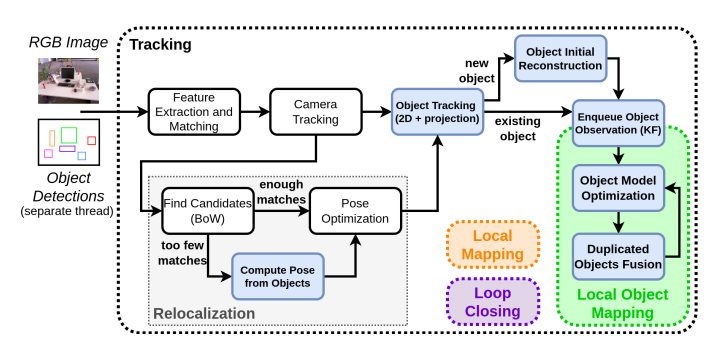
图 2:系统:蓝色项对应于 ORB-SLAM2 主干网中新添加的元素。请注意,每个模块(Tracking,
Local Mapping, Loop Closing and Local Object Mapping)都在单独的线程中运行
4.2 椭球体 object 表示
使用一个 3D 椭球体,建模一个 object。这个 object 在图像中的观测 是一个 椭圆。这是一个 粗略但轻量级的表示,只需要九个参数:三个参数用于 axes size,三个参数用于orientation,三个参数用于position。
此外,椭球体在任何视点下都投影为椭圆。其方程可以使用对偶空间以闭合形式表示。在该空间中,椭球体由 4 × 4 矩阵 Q 定义,椭圆由 3 × 3 矩阵 C 定义,它们通过投影矩阵 P [12] 连接在一起:
相比之下,使用物体的长方体表示是不可能的。事实上,将 3D box corners with the 2D box edges 相匹配会导致高组合性。
4.3 Object 检测和关联
YOLO。 为了稳健性,我们只考虑分数高于 0.5 的检测,并丢弃其他检测。
随时间推移在对象检测之间建立关联是我们系统的关键部分。给定当前帧中的一组检测,目标是将每个检测与现有 Object 轨迹匹配,或者决定创建一个新对象轨迹。关联首先受到对象类别的约束。此外,我们还考虑了检测框的重叠以及检测框之间的 points 匹配。这使我们能够处理不准确或部分的 Object 检测。








【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 周边上新:园子的第一款马克杯温暖上架
· 分享 3 个 .NET 开源的文件压缩处理库,助力快速实现文件压缩解压功能!
· Ollama——大语言模型本地部署的极速利器
· DeepSeek如何颠覆传统软件测试?测试工程师会被淘汰吗?
· 使用C#创建一个MCP客户端
2023-06-05 pytorch 的 torchvision.datasets.ImageFolder 来自定义数据集