
深度学习优化方法
SGD > SGDM > NAG > AdaGrad > AdaDelta > RMSprop > Adam > AdaMax > Ndam > AMSGrad
优化算法的框架:
- 待优化参数:,目标函数:,初始学习率
- 每个epoch :
- 计算目标函数关于当前参数的梯度:;
- 根据历史梯度计算一阶动量和二阶动量,;
- 计算当前时刻的下降梯度
- 更新参数
TensorFlow提供11个优化器:
- Tf.train.AdadeltaOptimizer
- Tf.train.AdagradDAOptimizer
- Tf.train.AdagradOptimizer
- Tf.train.AdamOptimizer
- Tf.train.FtrlOptimizer
- Tf.train.GradientDescentOptimizer
- Tf.train.MomentumOptimizer
- Tf.train.ProximalAdagradOptimizer
- Tf.train.ProximalGradientDescentOptimizer
- Tf.train.RMSPropOptimizer
- Tf.train.SyncReplicasOptimizer
一、梯度下降法的变形
1.SGD
| , | SGD没有动量的概念,, |
缺点:下降速度快,收敛速度慢
2.BGD
3.mini-batch GD
梯度下降法的挑战:
- 学习率如何选择?对所有参数更新使用相同的学习率,对稀疏数据和频率差异大的数据不友好
- 如何使函数逃出鞍点?即那些在一个维度上是递增的,而在另一个维度上是递减的。这些鞍点通常被具有相同误差的点包围,因为在任意维度上的梯度都近似为0,所以SGD很难从这些鞍点中逃开。
二、梯度下降优化算法
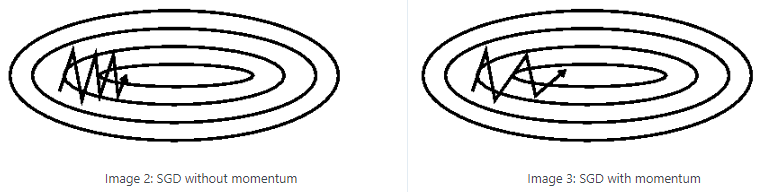
2.1 SGD with Momentum(SGD-M)
为了抑制SGD的震荡,SGDM认为梯度下降过程可以加入惯性。下坡的时候,如果发现是陡坡,那就利用惯性跑的快一些。在SGD基础上引入了一阶动量,一阶动量是各个时刻梯度方向的指数移动平均值。
| , | ,的经验值为0.9 |
2.2 SGD with Nesterov Acceleration(NAG,Nesterov Accelerated Gradient)
NAG全称Nesterov Accelerated Gradient,是在SGD、SGD-M的基础上的进一步改进,改进点在于步骤1。我们知道在时刻t的主要下降方向是由累积动量决定的,自己的梯度方向说了也不算,那与其看当前梯度方向,不如先看看如果跟着累积动量走了一步,那个时候再怎么走。因此,NAG在步骤1,不计算当前位置的梯度方向,而是计算如果按照累积动量走了一步,那个时候的下降方向,然后用下一个点的梯度方向,与历史累积动量相结合,计算步骤2中当前时刻的累积动量。
| , | |
然后用下一个点的梯度方向,与历史累积动量相结合,计算步骤2中当前时刻的累积动量。
SGD及其变种以同样的学习率更新每个参数,但深度神经网络往往包含大量的参数,这些参数并不是总会用得到。对于经常更新的参数,我们已经积累了大量关于它的知识,不希望被单个样本影响太大,希望学习速率慢一些;对于偶尔更新的参数,我们了解的信息太少,希望能从每个偶然出现的样本身上多学一些,即学习速率大一些。
2.3 AdaGrad
|
|
|
| , | , |
| , 一般为了避免分母为0,会在分母上加一个小的平滑项,通常取1e-8 | |
|
|
AdaGrad让学习率适应参数(学习率实际上由变成了),对于出现次数较少的特征,对其使用更大的学习率;对于出现次数较多的特征,对其采用较小的学习率。适合处理稀疏数据,为什么适合???
缺点:
- 由公式可以看出,仍依赖于人工设置一个全局学习率,设置过大的话,会使regularizer过于敏感,对梯度的调节太大,通常采用0.01
- 由于没增加一个正项,在整个训练过程中,累加的和会持续增长。这会导致学习率变小以至于最终变得无限小,在学习率无限小时,Adagrad算法将无法取得额外的信息
2.4 AdaDelta
Adadelta是Adagrad的一种扩展算法,以处理Adagrad学习速率单调递减的问题。不是计算所有的梯度平方,Adadelta将计算计算历史梯度的窗口大小限制为一个固定值w。Vt
先前得到的adagrad参数更新向量为
将对角矩阵替换成历史梯度的均值,
将分母的均方根误差记作,所以,,
作者引入一个指数衰减均值,这次不是梯度平方,而是参数的平方的更新:为什么要引入,不引入会怎么样???
因此,参数更新的均方根误差为,
由于是未知的,我们利用参数的均方根误差来近似更新,利用替换先前更新规则中的学习率,最终得到adadelta的更新规则为:
| , | , |
使用Adadelta算法,我们甚至都无需设置默认的学习率,因为更新规则中已经移除了学习率。
特点:
- 训练初中期,加速效果不错,很快
- 训练后期,反复在局部最小值附近抖动
2.5 RMSProp(root mean square prop)
- 作者:Geoff Hinton
- 文章:http://www.cs.toronto.edu/~tijmen/csc321/slides/lecture_slides_lec6.pdf
RMSProp是与Adadelta在相同时间里提出来的,都起源于对adagrad的极速递减的学习率问题的求解,与adadelta不同的是,RMSProp的学习率仍需要手动设置。
| , | , |
| , 一般取0.001 |
特点:
- 其实RMSprop依然依赖于全局学习率
- RMSprop算是Adagrad的一种发展,和Adadelta的变体,效果趋于二者之间
- 适合处理非平稳目标 - 对于RNN效果很好
2.6 Adam(Adaptive moment estimation)
我们看到,SGD-M在SGD基础上增加了一阶动量,AdaGrad和AdaDelta在SGD基础上增加了二阶动量。把一阶动量和二阶动量都用起来,就是Adam了——Adaptive + Momentum。(有没有用到alpha?)
| , | , |
和分别是对梯度的一阶矩(均值)和二阶矩(非确定的方差)的估计,当 和初始化为0向量时,Adam的作者发现它们都偏向于0,尤其是在初始化的步骤和当衰减率很小的时候(例如和都趋向于1)
通过计算偏差校正的一阶矩和二阶矩估计来抵消偏差
由此生成了Adam的更新规则
通常,取0.9,取0.999,为
2.7 Ndam
Nesterov + Adam = Nadam
| , | |
参考文献:
【1】An overview of gradient descent optimization algorithms
【2】一个框架看懂优化算法之异同 SGD/AdaGrad/Adam
【3】深度学习最全优化方法总结比较(SGD,Adagrad,Adadelta,Adam,Adamax,Nadam)
【4】keras优化器


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· go语言实现终端里的倒计时
· 如何编写易于单元测试的代码
· 10年+ .NET Coder 心语,封装的思维:从隐藏、稳定开始理解其本质意义
· .NET Core 中如何实现缓存的预热?
· 从 HTTP 原因短语缺失研究 HTTP/2 和 HTTP/3 的设计差异
· 分享一个免费、快速、无限量使用的满血 DeepSeek R1 模型,支持深度思考和联网搜索!
· 使用C#创建一个MCP客户端
· ollama系列1:轻松3步本地部署deepseek,普通电脑可用
· 基于 Docker 搭建 FRP 内网穿透开源项目(很简单哒)
· 按钮权限的设计及实现