14(2).线性动态系统---粒子滤波 particle filter
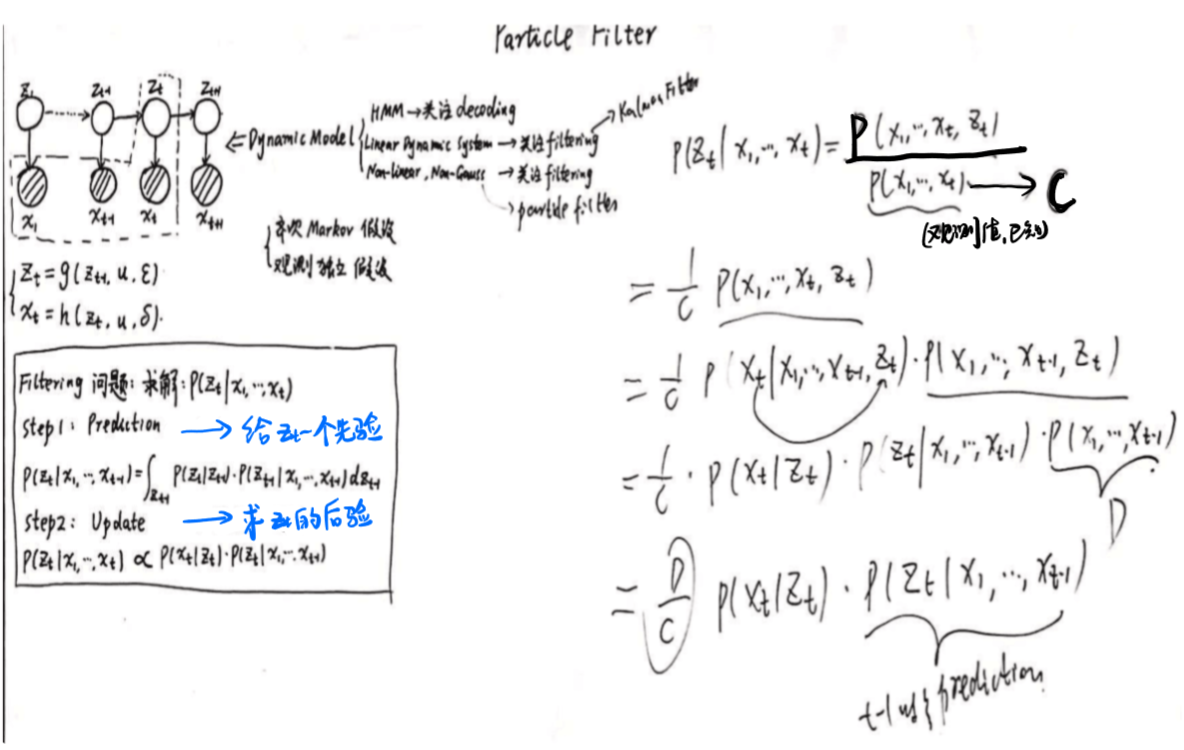
一、背景
与卡曼滤波不同的是,粒子滤波假设隐变量之间(隐变量与观测变量之间)是非线性的,并且不满足高斯分布,可以是任意的关系。
求解的还是和卡曼滤波一样,但由于分布不明确,所以需要用采样的方法求解。
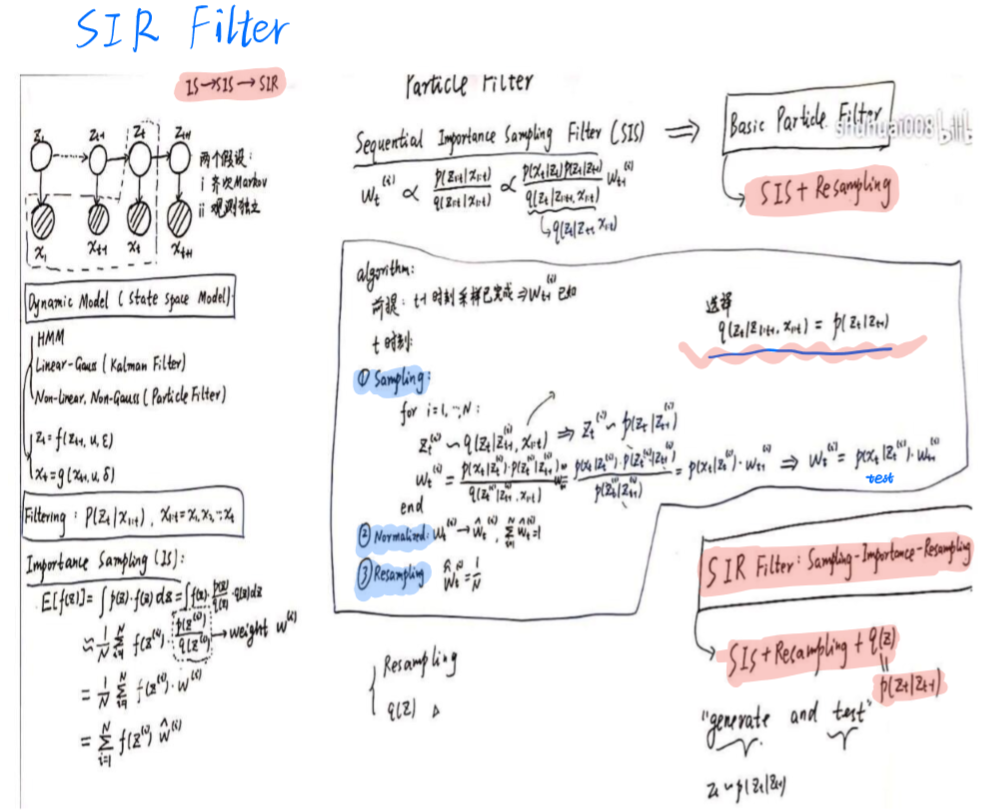
二、重要性采样(importance sampling & SIS)
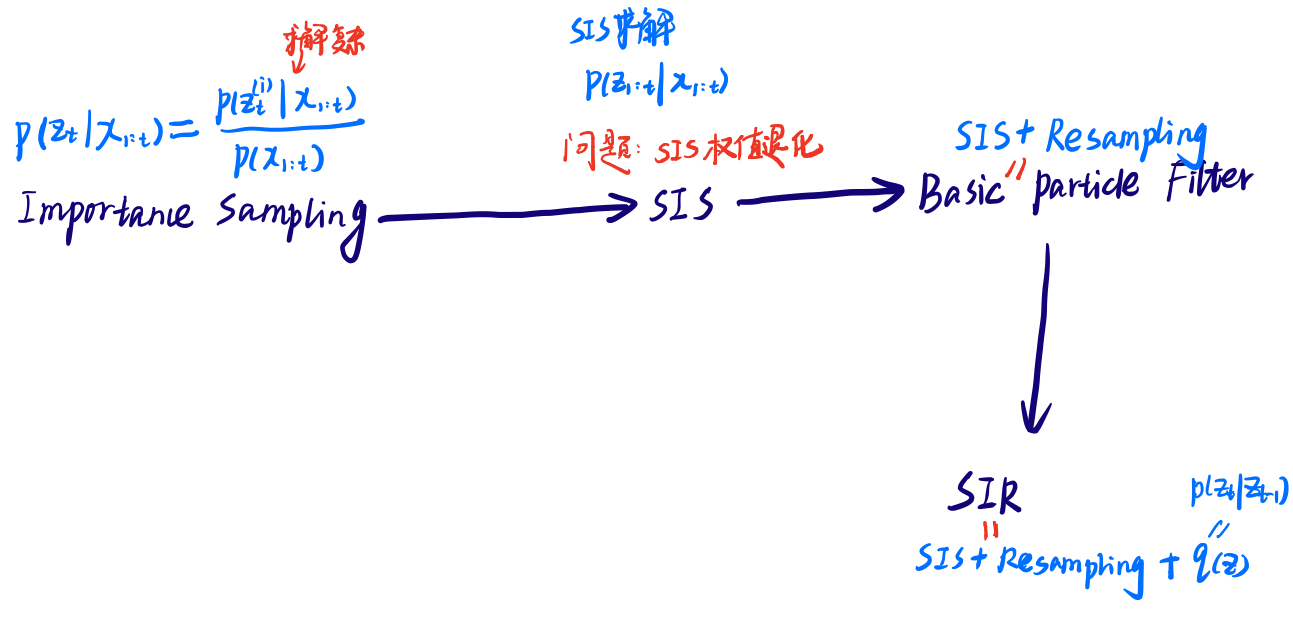
重要性采样(IS)需要计算p(zt|x1,...,t), t与t-1之间没有递推关系,不易求解
为此引入SIS,转换成求解p(z1,...t|x1,...t),且能够推出递推关系,方便求解

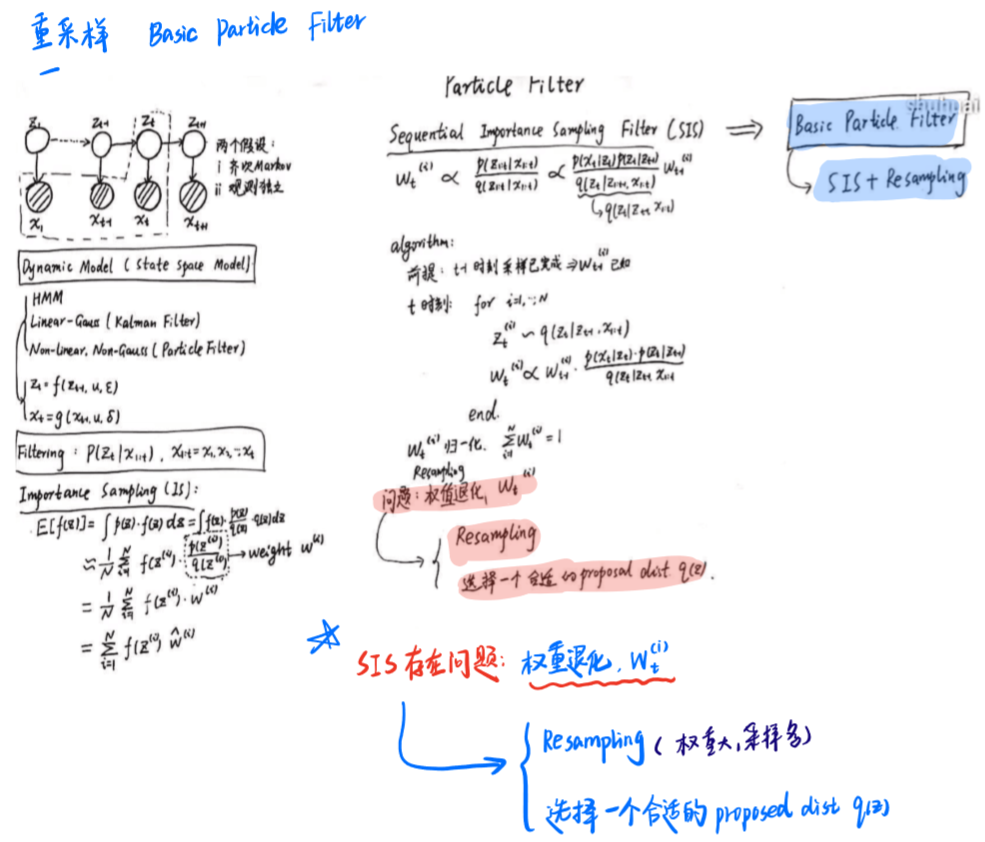
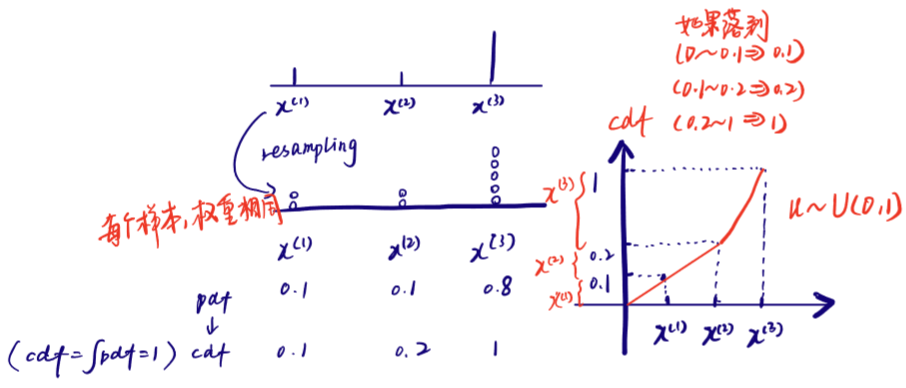
三、重采样Basic Particle Filter
但SIS也有一个严重问题,权重会随着时间增长呈指数递减。
为此引入Basic particle filter = SIS + Resampling(权重大的,多采样)
四、SIR Filter
SIR filter与basic particle filter区别在于,选择q(zt|z1,...,zt-1,x1,...,xt) = p(zt|zt-1)
SIR filter = SIS + resampling + q(z)