运动控制(三)使用200Smart控制步进电机
模块和接线
步进电机的红蓝绿黑分别接 A+,A-,B+,B-。
关键:红蓝,为一组,绿黑为一组。
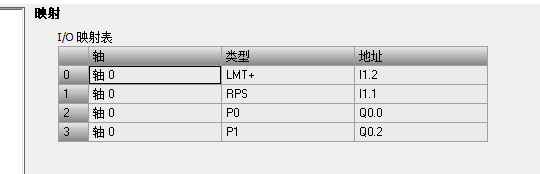
Smart200 Q0.0接PUL+,Q0.2接DIR+。
限位开关还可以用SM-K44
电机最高600转/分
SN04 N 棕蓝黑分别是电源,地,信号线。棕色接L+,蓝色接M,常开。
NPN传感器感应时,输出低电平信号,PNP相反,输出高电平信号。
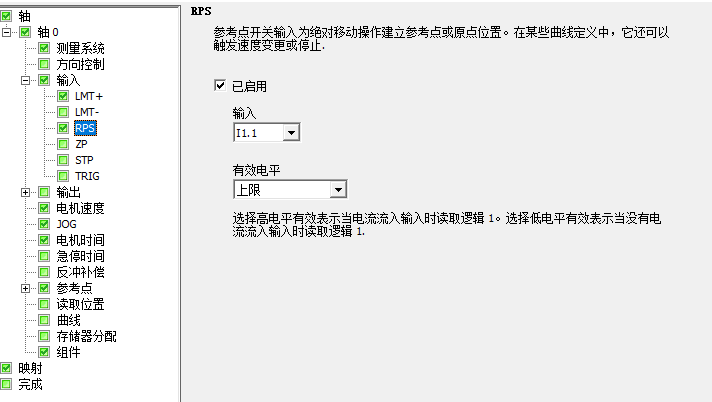
两个黑色分别接I1.1(原点), I1.2(正极限)。
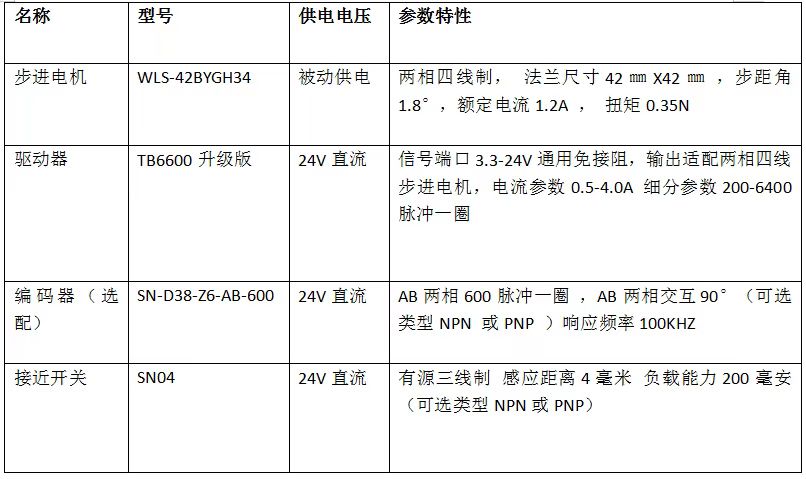
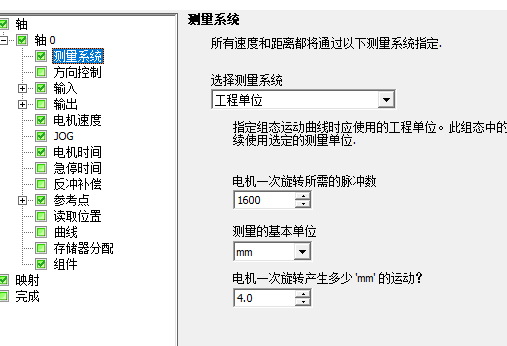
.螺距4mm,步进电机电流1.2A,步距角1.8°。
拨码开关设置:123为off,on,off,所以一圈脉冲数1600。456为on,off,on
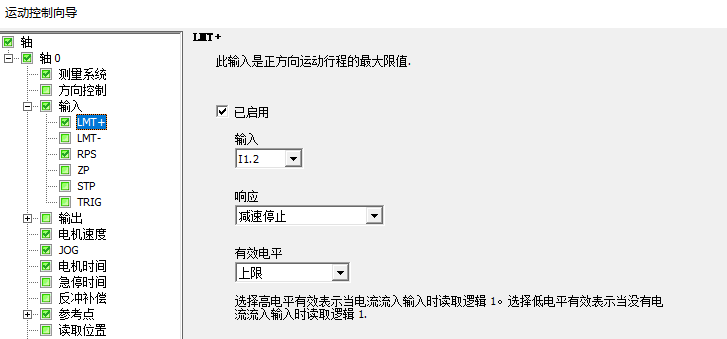
这里负极限不用。
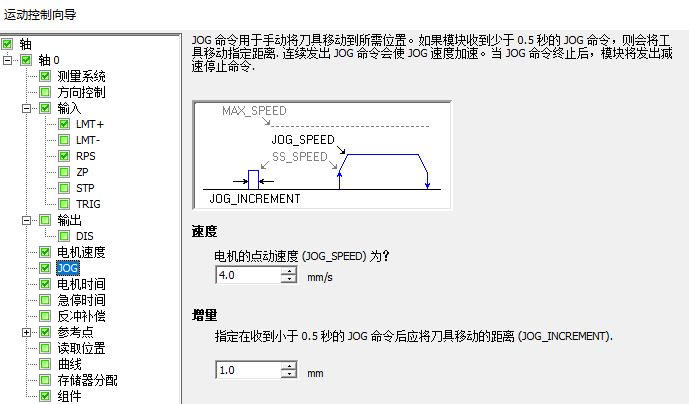

例子1: Jogging
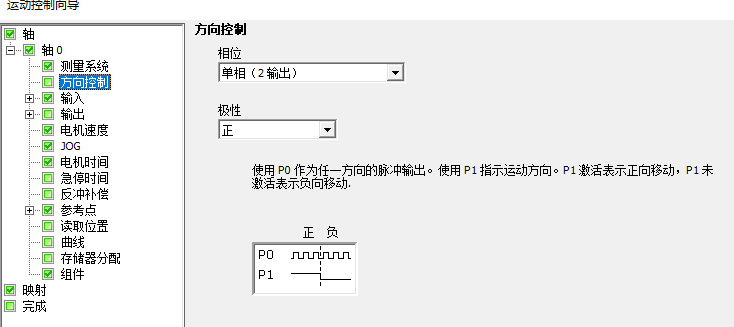
实测:往正方向运动的时候,面对着电机,其逆时针方向运动。
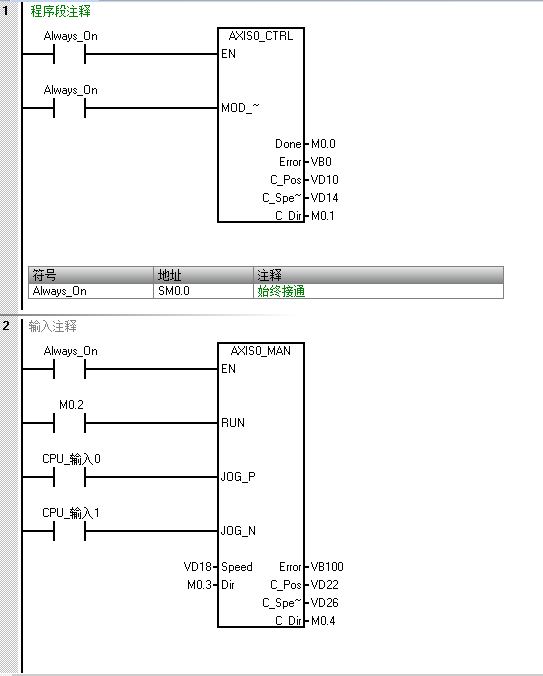
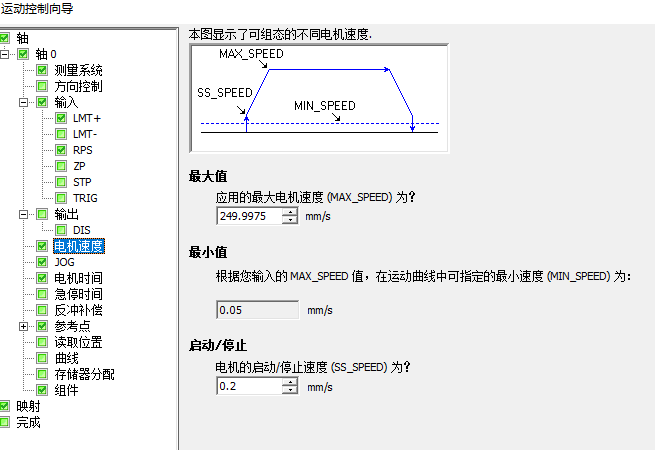
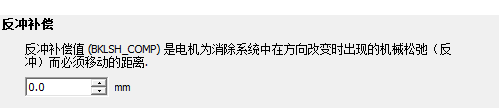
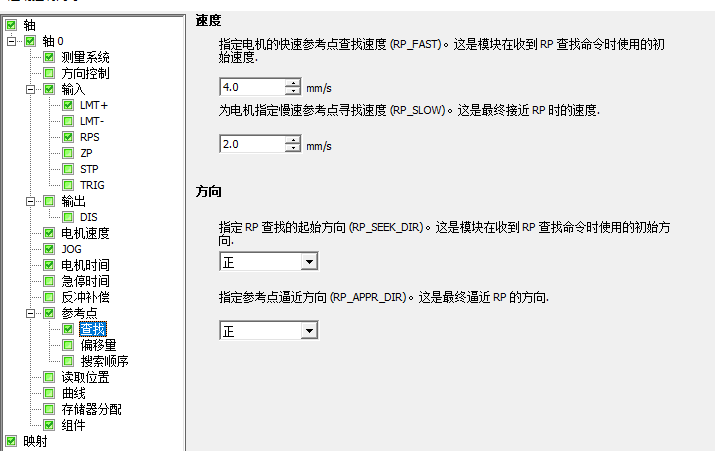
这里的速度,方向,由组态设置里面决定。
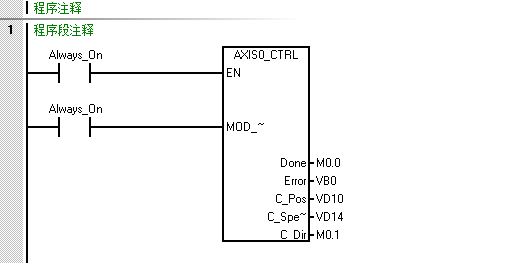
例子2:绝对和相对运动
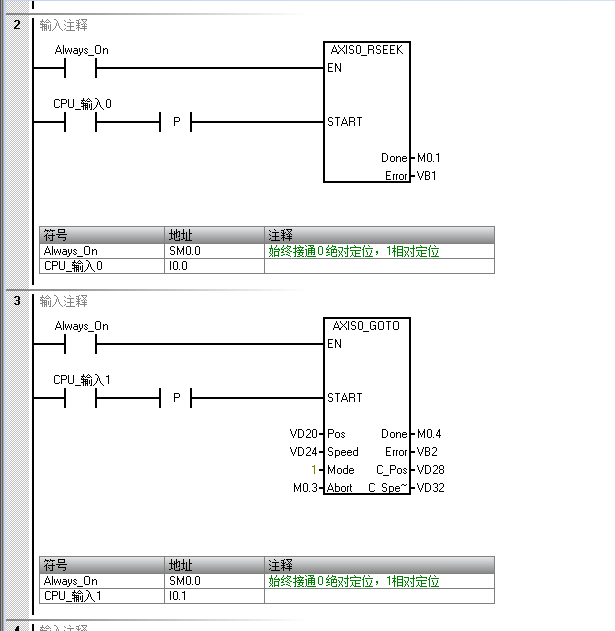
运行时,点击

然后在VD20,VD24(位置,速度)右键,写入设置具体数值

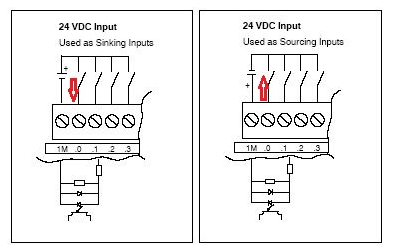
附录:PLC输入输出接口原理图
L+、M接24VDC电源。
1M、2M是公共端子
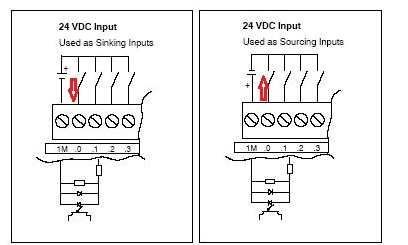
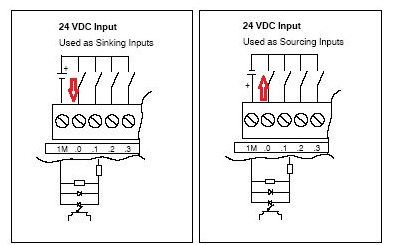
输入的漏性和源形
输出的漏型和源型
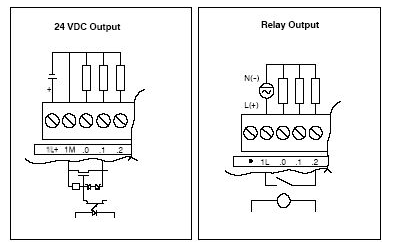
晶体管输出只能接成源型输出(图9),不能接成漏型,即输出为24V。

✖

 浙公网安备 33010602011771号
浙公网安备 33010602011771号