运动控制卡使用教程(二)
常用回零方式
名称解释: Home:原点 Index:编码器转动一圈产生的 Z 相信号(也称为 C 相信号)
具体可参考http://www.googoltech.com.cn/down-419.html
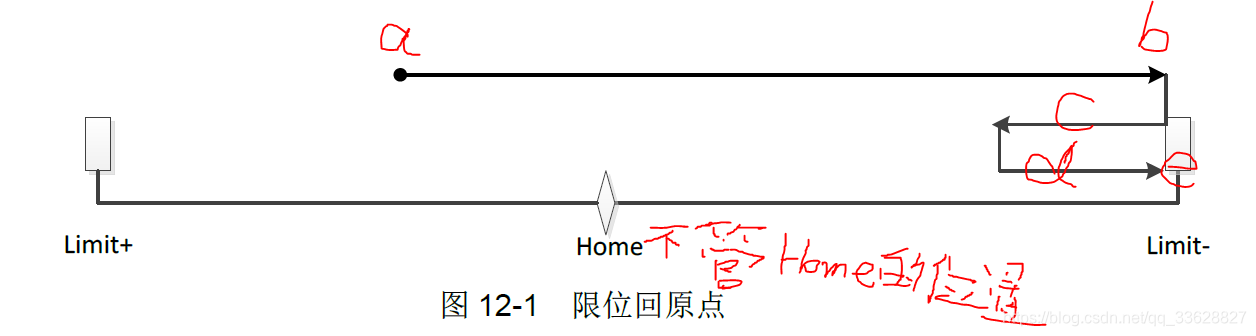
1限位回原点
(用于装有限位开关而未装有零点开关,精度要求不高的场景)
a,调用回原点指令
b,电机以较高速度运动到限位,
c,碰到限位后反向运动,
d,脱离限位后再以较低速度往限位方向动,
e,再次碰到限位时停止运动,所听位置即为我们要找的原点。
此种方式用的最多,很多模组类型的运控系统都是x,y,z轴,且都是只装上下限位开关而不装零点开关的。
2限位加Home回原点
a,调用回原点指令
b,电机以较高速度运动到限位,
c,碰到限位后反向运动,开启高速硬件捕获,
d,在设定范围内搜索Home位置
e,触发Home开关,电机以较低速度运动到Home处,此即原点处。(这里触发Home开关后还是会运动一定位置,这个距离很小,我们感觉不到,但实际是运动了一段距离的)
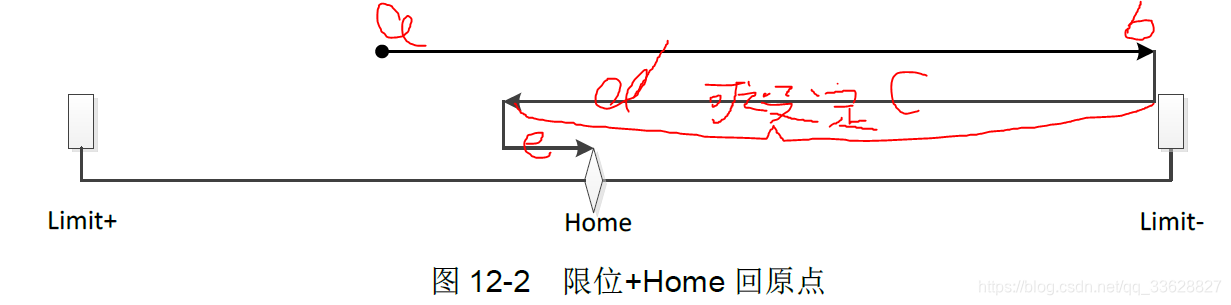
第二种回零方式使用于既装了限位开关,又方便安装Home开关且精度要求较高的情形。
例如z轴的上下限位都安装了,但是回零时不希望轴停在限位开关处,可用这种方式进行回零操作。
3Home回原点
a,调用回原点指令
b,电机以较高速度运动并开启告诉硬件捕获,
c,在设搜索范围内搜索home,
d,触发home开关,电机以较低速度运动到捕获的位置,此即我们要找的零点位置。
d段这里会返回去可能是因为b段这里开始是高速运动的,捕获到Home开关后可能速度过大来不及刹车,所以又要以较低速度返回去找零点,暂时这么理解吧!!!
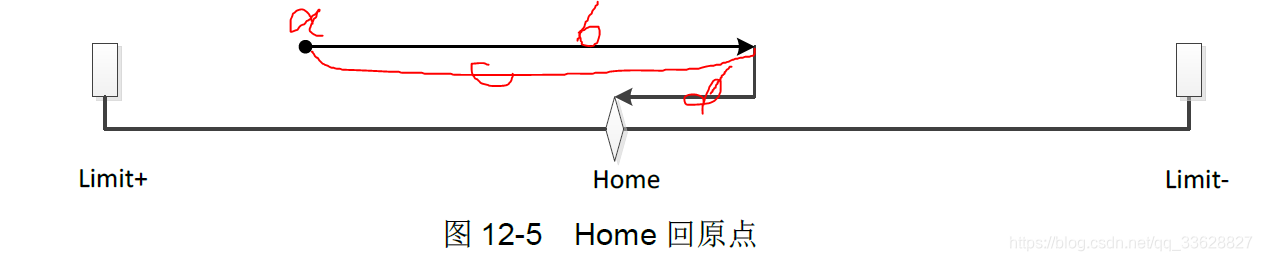
第三种回零方式主要在转盘的运动控制上应用,比如一个水平圆盘的运动可以在360度范围内走动,圆盘上又方便安装Home开关,就用这种回零方式。
4index回原点
a,调用回原点指令
b,电以较高速度运动并开启高速硬件捕获,
c,捕获到index信号,
d,电机以较低速度运动到index处停止,此即我们需要找的原点位置。
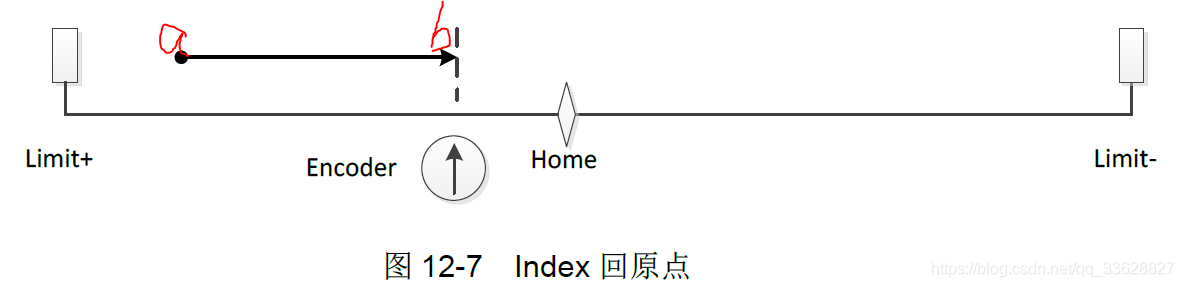
第四种回原点方式主要应用在转盘的运动控制,并且不方便安装原点和限位的情形下,这种回零方式要求在硬件上把z相信号接上,这样才能捕获到index信号,不然控制器会一直转动找不到index信号。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号