Robot Studio 使用笔记(二)
张开闭合夹爪
右键夹爪,disconnect library,然后右键Modify Mechanism,点击Add,
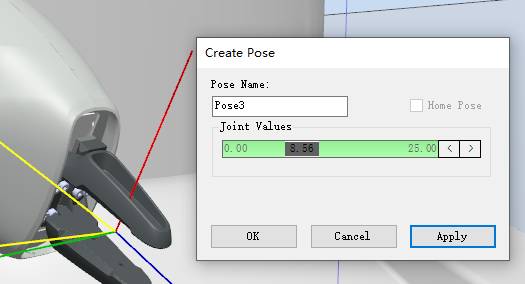
输入名称,距离,点击Apply
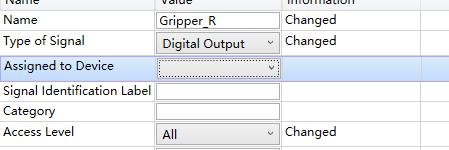
增加一个数字量输出
点击Controller,Configuration,I/O System,
在Signal右键 New Signal,如下图
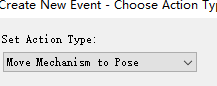
增加Event
如图,点击Simulation,右下角
点击增加,一路next,其他的默认,需要设置的如下图
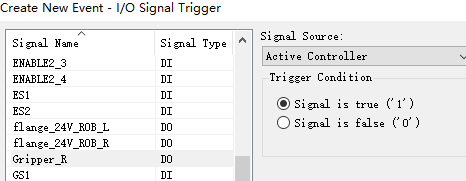
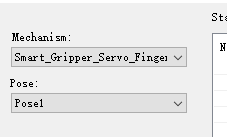
再增加一个事件,当信号为0的时候,选择的Pose为HomePose。
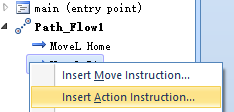
增加相关Action指令
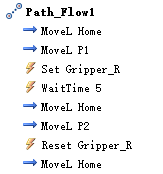
如何移动物件
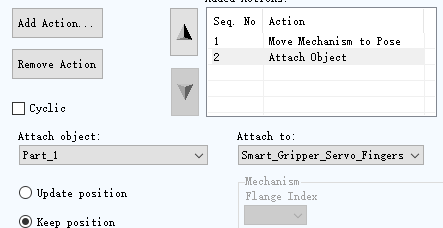
对于事件1:增加Action,Attach Object,设置如下
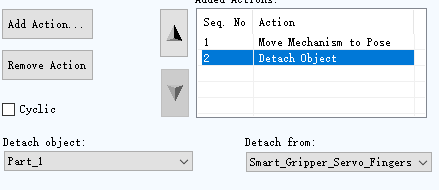
对于事件2,增加Action,Detach Object,设置如下
热启动后生效。
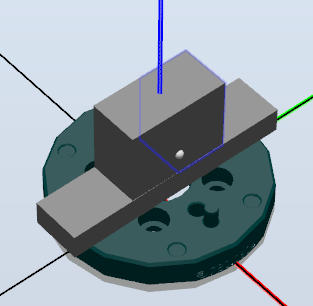
自定义夹爪
先隐藏机器人,Import Library,Equipment,导入一个IsoPlate small binzel
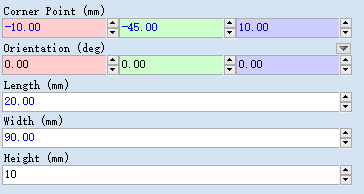
Modeling——Solid——Box,尺寸为
Corner Point -10 ,-45,10
长宽高为 20, 90,10
再添加2个box
Corner Point -10 ,-20, 20
长宽高为 20, 20,30
Corner Point -10 ,0, 20
长宽高为 20, 20,30
得到如下图
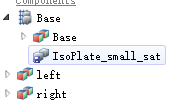
依次命名为
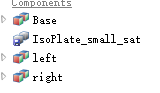
点击Modeling,Component Group,名称为Base,
然后将底座零件和圆盘拖入到该 group中
点击Create Mechanism,设置
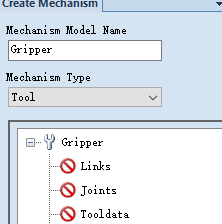
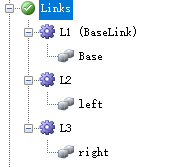
双击Links,先选择Base
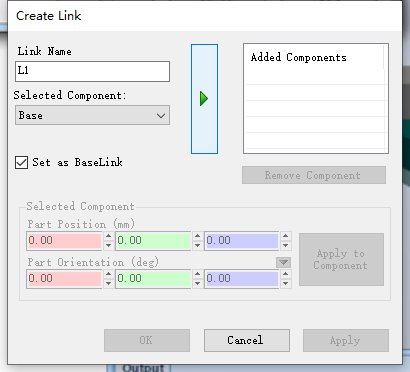
点击绿色箭头移动到右侧,然后点击apply
然后依次 L2,left
L3,right,得到如下图
双击Joints
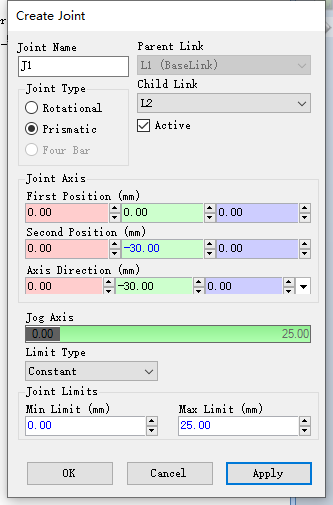
点击apply,
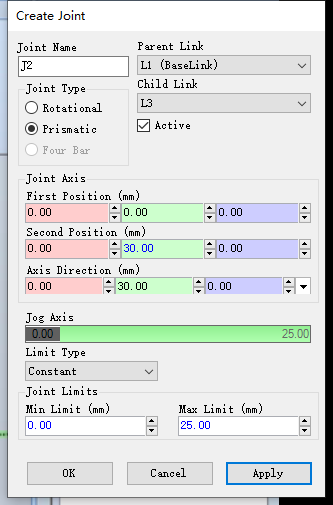
点击apply后 点击cancel
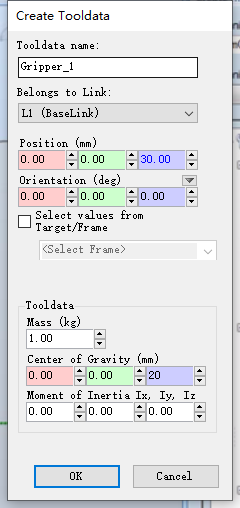
双击Tooldata
Compile Mechanism。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号