RobotStudio 教程资源 ABB配置系列
ABB RobotStudio - Basic control of the YuMi collaborative robot (SyncMove, Conveyor control, etc.)
https://www.youtube.com/watch?v=NlBHzPffA0o
注意Github
Tutorial 2 Using ABB library for gripper and targets
https://www.youtube.com/watch?v=7g5ViG5wBQk
ESE06 - RobotStudio IRB120 pick and place con pinza smart gripper servo
https://www.youtube.com/watch?v=0pQnFY9wrro
Amazing ABB RobotStudio Tutorial on Gripper Modeling, Pick and Place Simulation, and Rapid Coding
https://www.youtube.com/watch?v=JViwVuuogHo
How to program Dual Arm YUMI Robot_Part 1
https://www.youtube.com/watch?v=2mNryQpF-Cg
How to program YUMI Robot Gripper to Attach and Detach Item_Part 3
https://www.youtube.com/watch?v=A_Y9wE0bkbc
自定义夹爪
https://www.youtube.com/watch?v=gCyMF9VitIY
https://www.youtube.com/watch?v=X2TRVPtZVYM
Constraint-Based and Sensorless Force Control With an Application to a Lightweight Dual-Arm Robot
https://www.researchgate.net/publication/290533655_Constraint-Based_and_Sensorless_Force_Control_with_an_Application_to_a_Lightweight_Dual-Arm_Robot
ABB机器人:如何修改ABB控制器LAN3和WAN网口设置
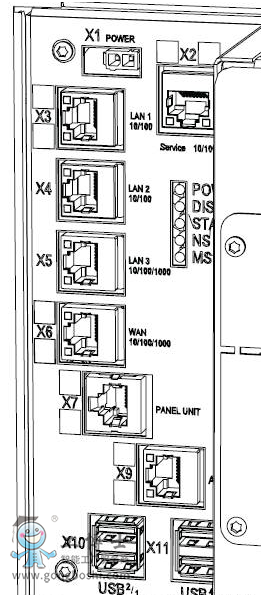
1)ABB机器人控制器有如下网口,其中
X2 是服务端口,ip固定192.168.125.1
X3连接了示教器
X7连接了安全板
X9连接了轴计算机
2)电脑robotstudio连接机器人,连接服务端口service port
3)也可以连接wan口
4)如果要连接LAN3口传输数据,需修改LAN3配
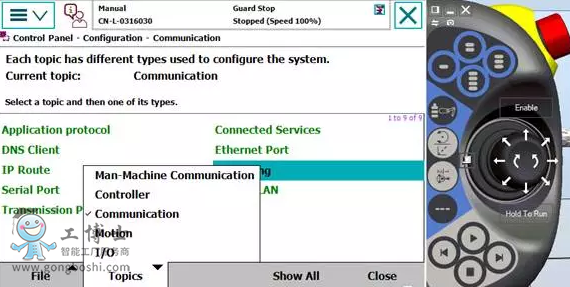
5)控制面板,配置,主题选择communication
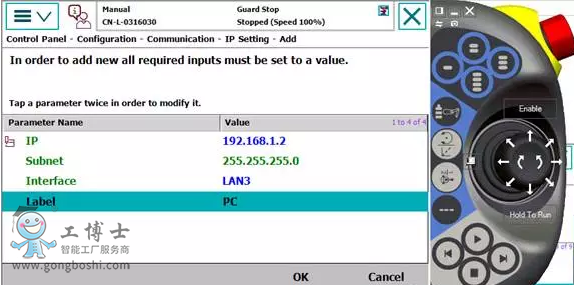
6)进入IPSETTING
7)添加ip地址,如下,选择LAN3口
如果是选择的wan口,配置如下
进入配置面板,控制器设置,主题切换到网络。设置下IP即可。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号