会员
周边
新闻
博问
闪存
赞助商
YouClaw
所有博客
当前博客
我的博客
我的园子
账号设置
会员中心
简洁模式
...
退出登录
注册
登录
牛郎
博客园
首页
新随笔
联系
订阅
管理
一种基于LQR使输出更加稳定的算法(超级实用)
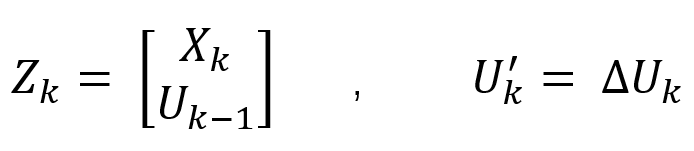
已知:
令:
则:
以上三式成立
具体步骤:
状态量最后一行加入“上一时刻的控制量”;
A,B根据上述方法变形;
Q,R增加维度(控制量一般都为一个,此时R维度不变);
最关键的是——输出量已经变为“控制量增量”,因此,在实际输出时要进行累加;
posted @
2018-10-09 21:18
牛郎
阅读(
2663
) 评论(
1
)
收藏
举报
刷新页面
返回顶部
公告





 浙公网安备 33010602011771号
浙公网安备 33010602011771号