【学习笔记】51单片机
1.流水灯
#include "reg52.h"
#include "intrins.h"
typedef unsigned char u8;
typedef unsigned int u16;
#define LED P2
void delay(u16 iTime)
{
while(iTime --);
}
sbit led1 = P2^0;
sbit led2 = P2^1;
sbit led3 = P2^2;
sbit led4 = P2^3;
sbit led5 = P2^4;
sbit led6 = P2^5;
sbit led7 = P2^6;
sbit led8 = P2^7;
//sbit led[7] = {led1,led2,led3,led4,led5,led6,led7,led8};
u16 i = 0;
void main()
{
LED = 0xfe;
delay(50000);
while(1)
{
for(i=0;i<7;i++){
LED = _crol_(LED,1);
delay(50000);
}
for(i=0;i<7;i++){
LED = _cror_(LED,1);
delay(50000);
}
// led2 = 0;
// delay(50000);
// led2 = 1;
// delay(50000);
}
}
2.蜂鸣器
#include "reg52.h"
typedef unsigned char u8;
typedef unsigned int u16;
sbit beep = P2^5 ;
void delay(u16 iTime)
{
while(iTime --);
}
u16 i = 0;
void main()
{
while(1)
{
beep = ~beep;
delay(10);
}
}
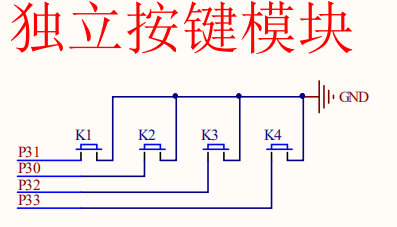
3.独立按键
#include "reg52.h"
typedef unsigned char u8;
typedef unsigned int u16;
sbit key1 = P3^1;
sbit led1 = P2^0;
void delay(u16 iTime)
{
while(iTime --);
}
void keypress()
{
if(key1 == 0)
{
delay(10000);
if(key1 == 0)
{
led1 = 0;
}
while(!key1);
}
}
void main()
{
while(1)
{
keypress();
led1 = 1;
}
}
4.中断
EA:中断允许总开关控制位。(1:所有中断请求被允许;0:所有中断请求被屏蔽)
ES:串行口中断允许控制位。(1:允许串口中断;0:禁止串口中断)
ET1:定时器/计数器T1的溢出中断允许控制位。(1:允许T1溢出中断;0:禁止T1溢出中断)
EX1:外部中断1中断允许位。(1:允许外部中断1中断;0:禁止外部中断1中断)
ET0:定时器/计数器T0的溢出中断允许控制位。(1:允许T1溢出中断;0:禁止T1溢出中断)
EX0:外部中断0中断允许位。(1:允许外部中断1中断;0:禁止外部中断1中断)
IT0(TCON.0),外部中断0触发方式控制位。
当IT0=0时,为低电平触发方式。
当IT0=1时,为边沿触发方式(下降沿有效)。
IE0(TCON.1),外部中断0中断请求标志位。
IT1(TCON.2),外部中断1触发方式控制位。
IE1(TCON.3),外部中断1中断请求标志位。
TF0(TCON.5),定时/计数器T0溢出中断请求标志位。
TF1(TCON.7),定时/计数器T1溢出中断请求标志位。
#include "reg52.h"
typedef unsigned char u8;
typedef unsigned int u16;
sbit key3 = P3^2;
sbit key4 = P3^3;
sbit led1 = P2^0;
sbit led2 = P2^1;
void delay(u16 iTime)
{
while(iTime --);
}
void Int0Init()
{
IT0 = 1;
EA = 1;
EX0 = 1;
}
void Int1Init()
{
IT1 = 1;
EA = 1;
EX1 = 1;
}
void Int0() interrupt 0
{
delay(1000);
if(key3 == 0)
{
led1 = ~led1;
}
}
void Int1() interrupt 2
{
delay(1000);
if(key4 == 0)
{
led2 = ~led2;
}
}
void main()
{
Int0Init();
Int1Init();
while(1);
}
5.Ds18b20 温度计传感器
#ifndef __TEMP_H_
#define __TEMP_H_
#include<reg52.h>
//---重定义关键词---//
#ifndef uchar
#define uchar unsigned char
#endif
#ifndef uint
#define uint unsigned int
#endif
//--定义使用的IO口--//
sbit DSPORT=P3^7;
//--声明全局函数--//
void Delay1ms(uint );
uchar Ds18b20Init();
void Ds18b20WriteByte(uchar com);
uchar Ds18b20ReadByte();
void Ds18b20ChangTemp();
void Ds18b20ReadTempCom();
int Ds18b20ReadTemp();
#endif
#include "temp.h"
void delay1ms(void) //误差 -0.651041666667us
{
unsigned char a,b;
for(b=102;b>0;b--)
for(a=3;a>0;a--);
}
void delay600us(void) //误差 -1.041666666667us
{
unsigned char a,b;
for(b=61;b>0;b--)
for(a=3;a>0;a--);
}
void delay80us(void) //误差 -0.789930555556us
{
unsigned char a;
for(a=35;a>0;a--);
}
void delay45us(void) //误差 -0.512152777778us
{
unsigned char a;
for(a=19;a>0;a--);
}
//DS18B20 初始化
uchar Ds18b20Init()
{
int i=0;
DSPORT = 0;
delay600us();
DSPORT = 1;
delay80us();
while(DSPORT)
{
delay1ms();
i++;
if(i>5)
{
return 0;
}
}
return 1;
}
//写时序
void Ds18b20WriteByte(uchar datas)
{
int i,j;
for(j=0;j<8;j++)
{
DSPORT = 0;
DSPORT = datas&0x01;
delay80us();
DSPORT = 1;
datas>>=1;
}
}
uchar Ds18b20ReadByte()
{
uchar dats,bi;
int i,j;
for(j=0;j<8;j++)
{
DSPORT = 0;
i++;
DSPORT = 1;
i++;i++;
bi = DSPORT;
dats = (dats >> 1)|(bi << 7);
delay45us();
}
return dats;
}
void Ds18b20ChangeTemp()
{
Ds18b20Init();
delay1ms();
Ds18b20WriteByte(0xcc);
Ds18b20WriteByte(0x44);
}
void Ds18b20ReadTempCom()
{
Ds18b20Init();
delay1ms();
Ds18b20WriteByte(0xcc);
Ds18b20WriteByte(0xbe);
}
int Ds18b20ReadTemp()
{
int temp;
uchar temph,templ;
Ds18b20ChangeTemp();
Ds18b20ReadTempCom();
templ = Ds18b20ReadByte();
temph = Ds18b20ReadByte();
temp = temph;
temp <<= 8;
temp |= templ;
return temp;
}
#include "reg52.h" //此文件中定义了单片机的一些特殊功能寄存器
#include"temp.h"
typedef unsigned int u16; //对数据类型进行声明定义
typedef unsigned char u8;
sbit LSA=P2^2;
sbit LSB=P2^3;
sbit LSC=P2^4;
char num=0;
u8 DisplayData[8];
u8 code smgduan[10]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};
void delay(u16 i)
{
while(i--);
}
void DigDisplay()
{
u8 i;
for(i=0;i<6;i++)
{
switch(i) //位选,选择点亮的数码管,
{
case(0):
LSA=1;LSB=1;LSC=1; break;//显示第0位
case(1):
LSA=0;LSB=1;LSC=1; break;//显示第1位
case(2):
LSA=1;LSB=0;LSC=1; break;//显示第2位
case(3):
LSA=0;LSB=0;LSC=1; break;//显示第3位
case(4):
LSA=1;LSB=1;LSC=0; break;//显示第4位
case(5):
LSA=0;LSB=1;LSC=0; break;//显示第5位
}
P0=DisplayData[i];//发送数据
delay(100); //间隔一段时间扫描
P0=0x00;//消隐
}
}
void dataprocess(int temp)
{
float tp;
if(temp < 0)
{
DisplayData[0] = 0x40;
temp = temp-1;
temp = ~temp;
tp = temp;
temp = tp*0.0625*100+0.5;
}
else
{
DisplayData[0] = 0x00;
tp = temp;
temp = tp*0.0625*100+0.5;
}
DisplayData[1] = smgduan[temp % 10000 / 1000];
DisplayData[2] = smgduan[temp % 1000 / 100]|0x80;
DisplayData[3] = smgduan[temp % 100 / 10];
DisplayData[4] = smgduan[temp % 10 / 1];
}
void main()
{
while(1)
{
int temp = Ds18b20ReadTemp();
dataprocess(temp);
DigDisplay();
}
}
作者:Dozeoo
本文版权归作者和博客园共有,欢迎转载,但未经作者同意必须保留此段声明,且在文章页面明显位置给出原文连接,否则保留追究法律责任的权利。
